УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА ЛА
Угол  , образуемый продольной осью ЛА с горизонтальной плоскостью, называется углом тангажа. Изменение угла тангажа определяет продольное движение самолета. Система управления углом тангажа самолета служит для обеспечения выдерживания нужной траектории движения в вертикальной плоскости. При этом предусматривается возможность изменения заданного угла тангажа вручную с места пилота или автоматически по сигналам, вырабатываемым системой траекторного управления.
, образуемый продольной осью ЛА с горизонтальной плоскостью, называется углом тангажа. Изменение угла тангажа определяет продольное движение самолета. Система управления углом тангажа самолета служит для обеспечения выдерживания нужной траектории движения в вертикальной плоскости. При этом предусматривается возможность изменения заданного угла тангажа вручную с места пилота или автоматически по сигналам, вырабатываемым системой траекторного управления.
Выходными характеристиками самолета в продольном движении служат углы тангажа и наклона вектора скорости  в вертикальной плоскости. Эти углы связаны с углом атаки соотношением
в вертикальной плоскости. Эти углы связаны с углом атаки соотношением  . При управлении углом тангажа происходит два движения: поворот продольной оси самолета вокруг поперечной оси и поворот вектора скорости центра масс в вертикальной плоскости. Поворот самолета вокруг поперечной оси осуществляется под действием продольных моментов, создаваемых рулем высоты, а поворот вектора скорости – под действием нормальных сил. При повороте продольной оси самолета на угол
. При управлении углом тангажа происходит два движения: поворот продольной оси самолета вокруг поперечной оси и поворот вектора скорости центра масс в вертикальной плоскости. Поворот самолета вокруг поперечной оси осуществляется под действием продольных моментов, создаваемых рулем высоты, а поворот вектора скорости – под действием нормальных сил. При повороте продольной оси самолета на угол  , изменяется угол атаки
, изменяется угол атаки  , что приводит к изменению момента статической устойчивости самолета (момент статической устойчивости – часть аэродинамического момента, пропорциональная углу атаки) и к изменению подъемной силы, что является причиной поворота вектора скорости.
, что приводит к изменению момента статической устойчивости самолета (момент статической устойчивости – часть аэродинамического момента, пропорциональная углу атаки) и к изменению подъемной силы, что является причиной поворота вектора скорости.
В случае короткопериодического движения при горизонтальном полете уравнения движения самолета будут иметь вид
 ;
;
 ; (1)
; (1)
где  ,
,  ,
,  ,
,  ,
,  – коэффициенты, зависящие от конструкции самолета,
– коэффициенты, зависящие от конструкции самолета,  ,
,  – внешние возмущения,
– внешние возмущения,  – отклонение руля высоты.
– отклонение руля высоты.
Из уравнений (1) путем преобразования Лапласа при нулевых начальных условиях можно получить передаточные функции самолета по углам тангажа:
 , (2)
, (2)
где  – комплексная переменная преобразования Лапласа,
– комплексная переменная преобразования Лапласа,  ,
,  .
.
2.1 Статическая система управления углом тангажа
Рассмотрим статическую систему автоматического управления углом тангажа (рисунок 1), включающую контур управления угловой скоростью и контур управления углом тангажа.

Рисунок 1. Структурная схема статической системы управления углом тангажа
На структурной схеме не показаны внешние возмущения и , действующие на ЛА. Закон управления системы берем в виде

 , (3)
, (3)
где  – заданное значение угла тангажа,
– заданное значение угла тангажа,  ,
,  – передаточные числа.
– передаточные числа.
Решая уравнение (1.3) совместно с уравнениями (1.1), получим
 , (4)
, (4)
где  ,
,  ,
,  ,
,  .
.
Рассматриваемая система обладает статической ошибкой. Чтобы определить эту ошибку в уравнении (1.4) примем  . Тогда при условии
. Тогда при условии  найдем
найдем
 . (5)
. (5)
Отсюда следует, что чем больше передаточное число , тем меньше статическая ошибка. Однако при значительном система может стать неустойчивой вследствие динамических погрешностей в элементах автопилота.
Выбор параметров системы управления следует производить из условий неискаженного воспроизведения заданного угла тангажа при слабом реагировании на возмущения и .
Будем осуществлять выбор передаточных чисел и в два этапа. Сначала выберем значение из условия заданного переходного процесса по угловой скорости тангажа во внутреннем контуре САУ. Для выбора передаточного числа заметим, что наилучшее качество процесса в колебательном звене получается при  .
.
Передаточная функция для замкнутого внутреннего контура имеет вид
 , (6)
, (6)
где  ,
,  . (7)
. (7)
Исключая из уравнений (1.7) частоту  , получим выражение для
, получим выражение для
 (8)
(8)
Для внешнего замкнутого контура САУ можно написать передаточную функцию
 , (9)
, (9)
где  ,
,  ,
,  .
.
Известно, что параметры Вышнеградского  и
и  соответствуют оптимальному переходному процессу, если они меняются в пределах от 2 до 3. Поскольку определяется коэффициентом затухания
соответствуют оптимальному переходному процессу, если они меняются в пределах от 2 до 3. Поскольку определяется коэффициентом затухания  , то следует задать .
, то следует задать .
Из (9) получаем формулу для вычисления :
 ,
,  . (10)
. (10)
Полученные выражения определяют безразмерные значения величин. Для получения размерных величин необходимо воспользоваться зависимостями
 ,
,  ,
,  , (11)
, (11)
где  – аэродинамическая постоянная времени ЛА.
– аэродинамическая постоянная времени ЛА.
Размерные передаточные числа  и
и  показывают, на какой угол в градусах необходимо отклонить руль высоты при отклонении самолета по углу тангажа на 1° или угловой скорости тангажа 1 град/с.
показывают, на какой угол в градусах необходимо отклонить руль высоты при отклонении самолета по углу тангажа на 1° или угловой скорости тангажа 1 град/с.
2.2 Астатическая система управления углом тангажа
Рассмотрим некоторые вопросы динамики автоматического управления углом тангажа посредством астатического автопилота со скоростной обратной связью (рис. 1.2). Закон управления примем в виде
 , (12)
, (12)
где , ,  – передаточные числа.
– передаточные числа.
Рисунок 2. Структурная схема продольного канала астатического автопилота со скоростной обратной связью
Для исследования переходных процессов решим уравнение (12) совместно с уравнениями (1):
 , (14)
, (14)
где  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Поскольку возмущение  входит под знак оператора дифференцирования, то система не имеет статических погрешностей по отношению к углу тангажа.
входит под знак оператора дифференцирования, то система не имеет статических погрешностей по отношению к углу тангажа.
Рассмотрим передаточную функцию САУ по управляющему сигналу
 , (15)
, (15)
где  ,
,  ,
,  ,
,  .
.
Выберем параметры систем из условия кратности корней  и
и  . Передаточные числа при этих условиях будут:
. Передаточные числа при этих условиях будут:
 ,
,  ,
,  ,
,
 . (16)
. (16)
Размерные передаточные числа:
 ,
,  ,
,  . (17)
. (17)
Для изучения динамических характеристик систем автоматического управления углом тангажа в работе используются две модели, созданные в пакете Simulink системы MATLAB: Lab1_1.mdl – модель статической САУ углом тангажа (рисунок.3) Lab1_2.mdl – модель астатической САУ углом тангажа (рисунок .4).
Числовые значения коэффициентов рассчитаны при следующих входных данных: = 2,4; = 0,4; = 38; = 4,45; = 49; = 1;  (для статической системы).
(для статической системы).
На схеме приняты следующие обозначения:  ,
,  – коэффициенты числителя передаточной функции объекта управления;
– коэффициенты числителя передаточной функции объекта управления;  ,
,  – коэффициенты знаменателя передаточной функции объекта управления;
– коэффициенты знаменателя передаточной функции объекта управления;  ,
,  ,
,  .
.
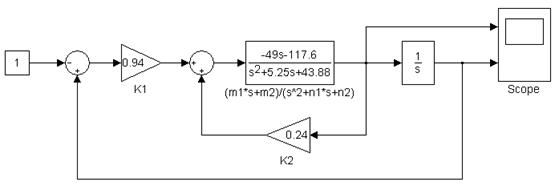
Рисунок .3. Статическая САУ углом тангажа самолета
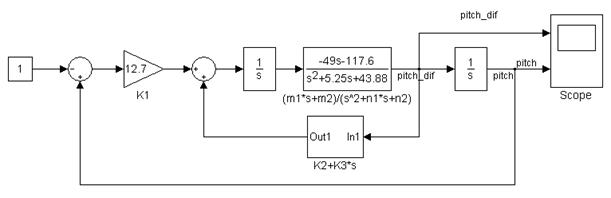
Рисунок 4. Астатическая САУ углом тангажа самолета
Дата добавления: 2015-10-13; просмотров: 7107;