МОДЕЛИРОВАНИЕ ЦИФРОВЫХ СИСТЕМ УПРАВЛЕНИЯ С ПОМОЩЬЮ ПАКЕТА MatLab
Основным математическим аппаратом теории дискретных систем является z – преобразование. С его помощью решаются задачи анализа устойчивости и качества, а также синтеза систем управления, в состав которых входит цифровой компьютер. Поскольку ввод информации в компьютер осуществляется через определенные интервалы времени, то необходимо разработать специальный метод математического описания и анализа качества цифровых систем управления.
Цифровая система оперирует с данными, получаемыми из непрерывного сигнала путем выборки его значений в равноотстоящие моменты времени. В результате получается временная последовательность данных, называемая дискретным сигналом. Эту последовательность можно преобразовать в область переменной s и, в конечном счете, в область переменной z с помощью соотношения z = esT . Область комплексной переменной z обладает свойствами, очень похожими на свойства области переменной s преобразования Лапласа.
Для анализа устойчивости и качества цифровой системы можно использовать z – преобразование передаточной функции. Таким образом достаточно просто можно определить характеристики замкнутой системы управления, в которой компьютер выполняет функции корректирующего устройства (или регулятора). Для определения положения корней характеристического уравнения также можно использовать метод корневого годографа.
На рисунке 1 приведена функциональная схема одноконтурной цифровой системы управления.

 Входной сигнал Выходной сигнал (аналоговый)
Входной сигнал Выходной сигнал (аналоговый)
(цифровой) Цифровой Аналоговый
 Цифровой Аналоговый
Цифровой Аналоговый

Рисунок 1. Функциональная схема цифровой системы управления
Компъютер в этой системе по определенной программе обрабатывает представленную в цифровой форме ошибку и выдает на выходе сигнал также в цифровой форме. Программа может быть написана так, что качество системы в целом будет равно или очень близко к заданному. Многие компъютеры способны принимать и обрабатывать несколько входных сигналов, поэтому цифровые системы управления часто бывают многомерными.
Компъютер получает и обрабатывает сигнал в цифровом (численном) виде, а не в виде непрерывной переменной. В цифровой системе управления обязательно присутствует компъютер, входной и выходной сигнал которого представлены в виде числового кода. Преобразование непрерывного сигнала в цифровую форму осуществляет аналого-цифровой преобразователь (АЦП), как показано на рисунке 1. Выходной сигнал компъютера (цифровой) преобразуется в непрерывную форму с помощью цифроаналогового преобразователя (ЦАП).
Цифровое управление имеет ряд преимуществ, куда относятся: повышенная точность измерений; использование цифровых сигналов (кодов), датчиков и преобразователей и микропроцессоров; меньшая чувствительность к шумам и помехам; возможность легко изменять алгоритм управления в программном обеспечении. Повышенная точность (чувствительность) измерений объясняется тем, что цифровые датчики и устройства работают с маломощными сигналами. Наличие цифровых сигналов дает возможность использовать широкий спектр цифровых устройств и линий коммуникации. Цифровые датчики и преобразователи способны эффективно измерять, передавать сигналы и связывать между собой различные устройства. Кроме того, многие системы объективно являются цифровыми, потому что они работают с импульсными сигналами.
Анализ и синтез дискретных систем управления облегчается при использовании интерактивных компъютерных средств. Многие функции пакета MATLAB, применяемые к непрерывным системам, имеют аналоги, разработанные специально для дискретных систем. Модели объектов в виде дискретных передаточных функций получаются в MATLAB с помощью функции tf. Подобно тому, как это делалось в непрерывных системах. Применение функции tf проиллюстрировано ниже. С помощью функций c2d и d2c можно выполнить преобразование модели системы. Функция c2d преобразует непрерывную систему в дискретную, а функция d2c – наоборот.
Функция tf: sys = tf(num, den, Ts),
где sys - дискретная передаточная функция объекта;
num, den – G( z ) = num/den;
Ts – период квантования.
Функция c2d: [sysd] = c2d(sysc,T, ‘zoh’ ),
где sysd = G(z);
sysc = Gp(s);
T – период квантования;
‘zoh’ – преобразование в дискретную форму с учетом экстраполятора.
Функция d2c: [sysc]= d2c(sysd,T, ‘zoh’ ),
где sysc =Gp(s);
sysd =G(z);
T–период квантования;
‘zoh’ –преобразование в непрерывную форму с учетом экстраполятора.
В качестве примера рассмотрим преобразование объекта управления с передаточной функцией  в дискретную форму с помощью функции c2d. Примем период квантования Т =1 сек.
в дискретную форму с помощью функции c2d. Примем период квантования Т =1 сек.
Использование функции c2d для преобразования G(s) = G (s)G (s) в G(z).
% Этот скрипт преобразует передаточную функцию в
% непрерывной форме  в дискретную форму при
в дискретную форму при
% периоде квантования Т= 1с.
num=[1]; den= [1 1 0]; sysc=tf(num,den);
T=1;
[sysd]=c2d(sysc,T,’zoh’)
В результате преобразования получим передаточную функцию дискретной системы:
G(z) = 
При моделировании дискретных систем также используются функции step, impulse и lsim. Применение функции step для определения реакции системы у(кТ) на единичный ступенчатый сигнал
[y,T]=step(sys,T)
где у-реакция системы,
Т-вектор времени моделирования, sys =G(z), Т должно быть задано в виде Тi : Тs: Т 
где Тi - начало моделирования;
Тs - период квантования;
Т - время моделирования.
Пример применения функции step для определения реакции системы у(кТ) на единичный ступенчатый сигнал приведен ниже:
% Этот скрипт вычисляет переходную характеристику у (кТ)
% дискретной системы
%
num=[1]; den=[1 1 0];
sysc=tf(num,den);
sysd=c2d(sysc,1, ‘zoh’);
sys=feedback(sysd,[1]);
T=[0:1:20]; step(sys,T)
Результат вычисления переходной характеристики дискретной системы приведен на рисунке 2.
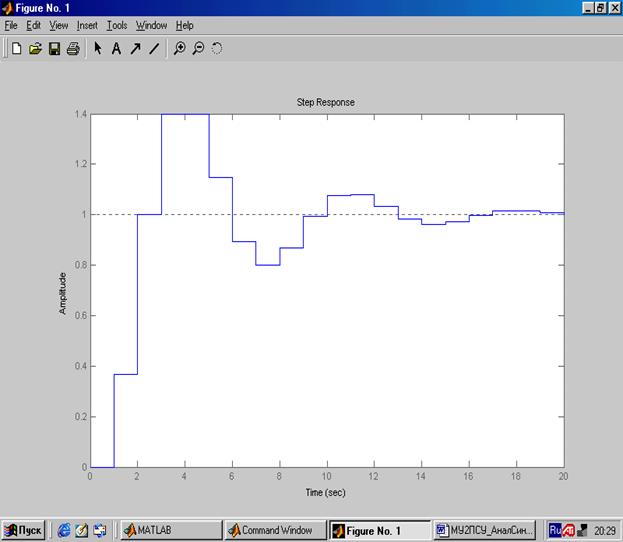
Рисунок 2. Переходная характеристика дискретной системы
% Этот скрипт вычисляет переходную характеристику
% непрерывной системы
%
numg=[1]; deng=[1 1 0]; sysg=tf(numg, deng );
%
[nd,dd]=pade(1,2);
sysp=tf(nd, dd);
sysi=tf([1],[1,0]);
sys1=series(1-sysp,sysi);
%
syso=series(sys1,sysg);sys=feedback(syso,[1]);
t=[0:0.1:20];
step(sys,t)
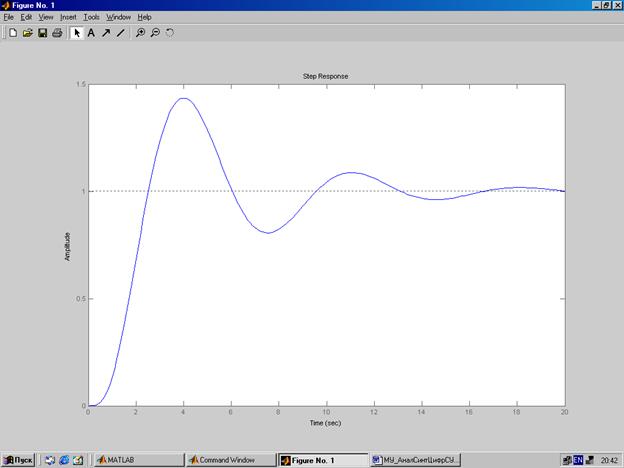
Рисунок 3. Переходная характеристика непрерывной системы
Реакция системы на единичный импульсный сигнал находится с помощью функции impulse, а функция lsim позволяет найти реакцию системы на произвольный входной сигнал. Эти функции применительно к дискретным системам действуют по сути так же, как аналогичные функции для непрерывных систем.
Применение функции impulse для определения реакции системы у(кТ) на единичный импульсный сигнал
[y,T]=impulse(sys,T),
где у-реакция системы,
Т-вектор времени моделирования, sys =G(z), Т должно быть задано в виде 0 : Тs: Т 
где Тi - начало моделирования;
Тs - период квантования;
Т - время моделирования.
Применение функции lsim для определения реакции системы у(кТ) на сигнал произвольного вида
[y,T]=lsim(sys,u),
где у-реакция системы,
Т-вектор времени моделирования, sys =G(z),
u- входной сигнал должен квантоваться с тем же периодом, что и при определении sys.
Пример применения функции rlocus к дискретным системам для построения корневого годографа для передаточной функции
G(z0D(z)= k 
приведен ниже.
% Этот скрипт строит корневой годограф для
% дискретной системы с передаточной функцией
%
% К(0.3678)(z+0.7189)
%
% (z-1)(z+0.2400)
%
num=[0.3678 0.2644]; den=[1.0000 -0.7600 -0.2400];
sys=tf(num,den);
rlocus(sys); hold on
x=[-1:0.1:1]; y=sqrt(1-x^. 2);
plot(x,y,’---‘,x, y,’---‘)
Дата добавления: 2015-10-13; просмотров: 6190;