Замкнутая система управления асинхронного электропривода, выполненного по системе ТРН-двигатель
 В цепь статора включены по схеме встречно параллельного подключения в тиристоров VS1…VS6, управляющие электроды подсоединены к выходу СИФУ, задачей которого является сдвиг управляющих импульсов в зависимости от величины управляющего сигнала и распределении по тиристорам.
В цепь статора включены по схеме встречно параллельного подключения в тиристоров VS1…VS6, управляющие электроды подсоединены к выходу СИФУ, задачей которого является сдвиг управляющих импульсов в зависимости от величины управляющего сигнала и распределении по тиристорам.
Сигнал управления определяется
Uy=(Uз-jω)Крс (1)
Uз – сигнал задания, формируемый RP1
ω – скорость вращения вала электрической машины, снимаемая тахогенератором
Крс – коэффициент промежуточного усилителя
В соответствии с уравнение (1) любое изменение скорости АД при изменении нагрузки вызовет изменение напряжения управления и в соответствии с этим меняется угол открывания тиристора.
Изменение задающего сигнала на потенциометре RP1 позволяет получить семейство жестких механических характеристик.
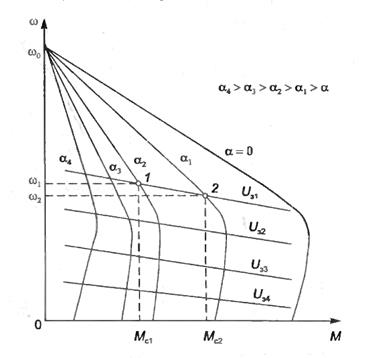
Допустим привод работает в точке 1 с моментом нагрузки Мс1, затем произошло увеличение статического момента до Мс2 в этом случае скорость начинает снижаться, что приведет к уменьшению ЭДС тахогенератора. Сигнал управления увеличивается, это приведет к уменьшению угла открывания тиристоров, а следователь увеличению напряжения на двигателе. Момент электрической машины начнет возрастать и в т.2 сравняется с Мс2.
Дата добавления: 2015-10-09; просмотров: 1742;