Выбор конструктивных баз базирующих элементов СП при их инициировании
Позиционирующее устройство предназначено для размещения в пространстве СП базирующего элемента сборочной оснастки и временная фиксация его на период закрепления на каркасе СП. Таким образом, объектом позиционирования является базирующий элемент СП. Базирующими элементами сборочной оснастки являются: рубильники и ложементы, плиты стыка, фиксаторы поверхностей сопряжения, установочные линейки и накладки, опоры и упоры, кронштейны с втулками – носителями КФО, БО и др. Перечисленные объекты различаются по характеру выполняемой функции, по конструктивному исполнению, по габаритам и массе. В связи с этим возникает проблема выбора унифицированного элемента, используемого в решении задачи позиционирования базирующего элемента СП. Такой элемент должен быть связан с основными базами объекта позиционирования.
Положение базирующих элементов в пространстве СП определяется по теоретическим (скрытым) базам: осям отверстий, теоретическим контурам, плоскостям и осям силовых элементов и т.д. При физическом монтаже стапеля теоретические базы базирующих элементов необходимо увязать с конструктивными базами, поскольку контроль положения базирующих элементов в пространстве стапеля производится по явным конструктивным базам.

Явные конструктивные базы связываются с характерными точками и поверхностями геометрического объекта. На рис. 27.4 показаны несколько примеров задания явных конструктивных баз в виде опорных точек на поверхностях непосредственно базирующих элементов сборочной оснастки.
Рис. 27.4. Примеры задания явных конструктивных баз на поверхностях базирующих элементов сборочной оснастки.
Как было отмечено выше, если по каким-либо причинам не удается определить явные базы, то осуществляется косвенный метод базирования, когда опорная точка, например, на оси отверстия, определяется через промежуточный носитель. На рис. 27.5 показаны примеры задания косвенных баз, когда конструктивные базы задаются с помощью специальных унифицированных переходных калибров.

Носители опорных точек конструктивных баз выбираются в зависимости от используемых инструментальных средств контроля пространственных координат опорной точки.
Рис. 27.5. Примеры задания косвенных конструктивных баз на поверхностях базирующих элементов сборочной оснастки с помощью переходных калибров.
При использовании оптических инструментальных средств контроля пространственных координат носителями опорной точки являются целевые знаки либо в виде перекрестных рисок на базовой поверхности (рис. 27.6, а), либо специальный целевой знак, входящий в комплект инструментальной системы оптического контроля (рис. 27.6, б).
При использовании в качестве средства инструментального контроля координатно-измерительной машины (КИМ) носителем опорной точки является переходная втулка с выполненным отверстием по профилю щупа КИМ (рис. 27.6, в, г).

Рис. 27.6. Типовые носители опорных точек конструктивных баз.
При выборе любого способа задания конструктивной базы координаты опорных точек связываются с теоретическими базами собираемого агрегата и их численные значения сводятся в специальную таблицу для каждого базирующего элемента, участвующего в монтаже СП. Таким образом, для задания однозначного пространственного положения любого базирующего элемента сборочной оснастки необходимо с помощью позиционирующего устройства задать в пространстве расчетное положение трех его опорных точек.
Увязка и расчет опорных точек базирующих элементов необходимо производить по существующему электронному макету собираемого агрегата. Как было отмечено ранее при наличии уже существующей сборочной оснастки, увязанной и отстыкованной с использованием традиционных носителей геометрической информации – монтажных эталонов для обеспечения преемственности геометрической информации необходимо использовать электронный макет монтажного эталона.
3. Схемы позиционирования элементов СП при их монтаже
Прямое позиционирование предполагает наличие некоторого позиционера, позволяющего производить перемещение базирующего элемента и связанного с ним переходного калибра в пространстве стапеля по шести координатам с текущим контролем координат опорных точек конструктивных баз с помощью одной из вышеперечисленных инструментальных систем. Практически этот способ используется в традиционном производстве, где в качестве позиционирующего устройства используется система винтовых домкратов. Выполняя последовательные линейные перемещения по различным направлениям с помощью винтов, производят текущий контроль положения опорных баз базирующих элементов сборочной оснастки. Несмотря на чрезвычайную простоту, этот способ отличается низкой производительностью из-за необходимости выполнения большого числа последовательных приближений (итераций). Кроме того, для размещения винтовых домкратов необходимо создание специальных, а в ряде случаев, уникальных опорных элементов. Повышение производительности при прямом позиционировании можно добиться, используя манипулятор промышленного робота (рис. 27.7).
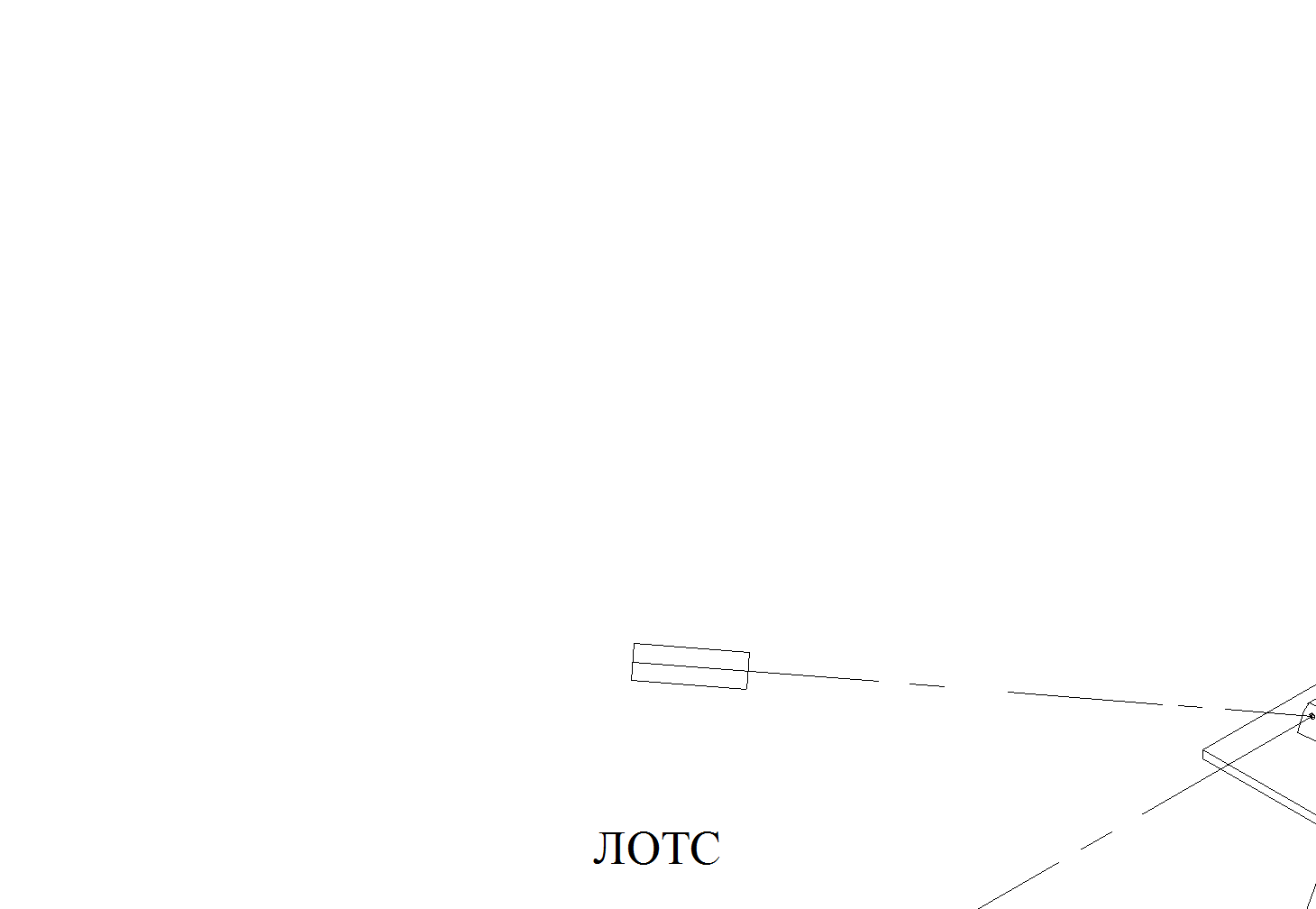
Рис. 27.7. Прямое позиционирование базирующего элемента с помощью манипулятора промышленного робота.
Обратное позиционирование заключается в том, что расчетное положение координат опорных точек конструктивных баз базирующих элементов сборочной оснастки (назовем их монтажными базовыми точками) задается в пространстве стапеля независимо с помощью носителей опорных точек позиционирующего устройства (назовем их опорными базовыми точками). Затем носители монтажных базовых точек конструктивных баз базирующих элементов совмещаются с соответствующими носителями опорных базовых точек позиционирующего устройства, обеспечивая, таким образом, заданное пространственное положение базирующего элемента (рис. 27.8). Такой способ не требует комплексных манипуляций по шести степеням свободы, а только независимых перемещений по трем координатам, исключая итерационные процедуры.
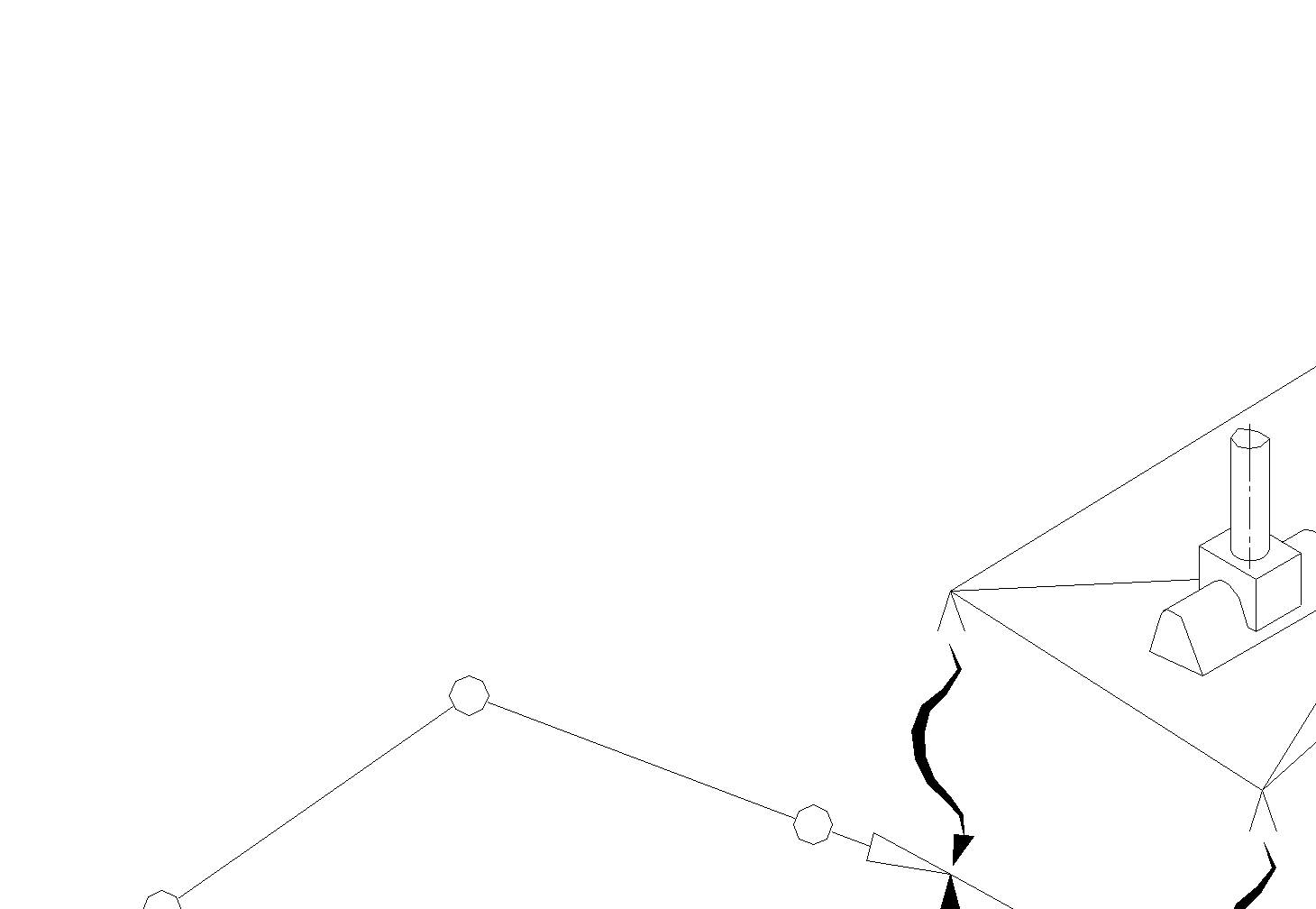
Рис. 27.8. Схема обратного позиционирования базирующего элемента.
Три монтажные базовые точки конструктивных баз базирующего элемента определяют в пространстве плоскость. Однозначное положение в пространстве плоскости можно задать различными способами, например тремя точками (рис. 27.9, а), парой скрещивающихся прямых (векторов) (рис. 27.9, б), прямой и точкой, не лежащей на этой прямой (рис. 27.9, в). Соответственно и конструктивное исполнение позиционирующего устройства будет определяться способом задания плоскости в пространстве.
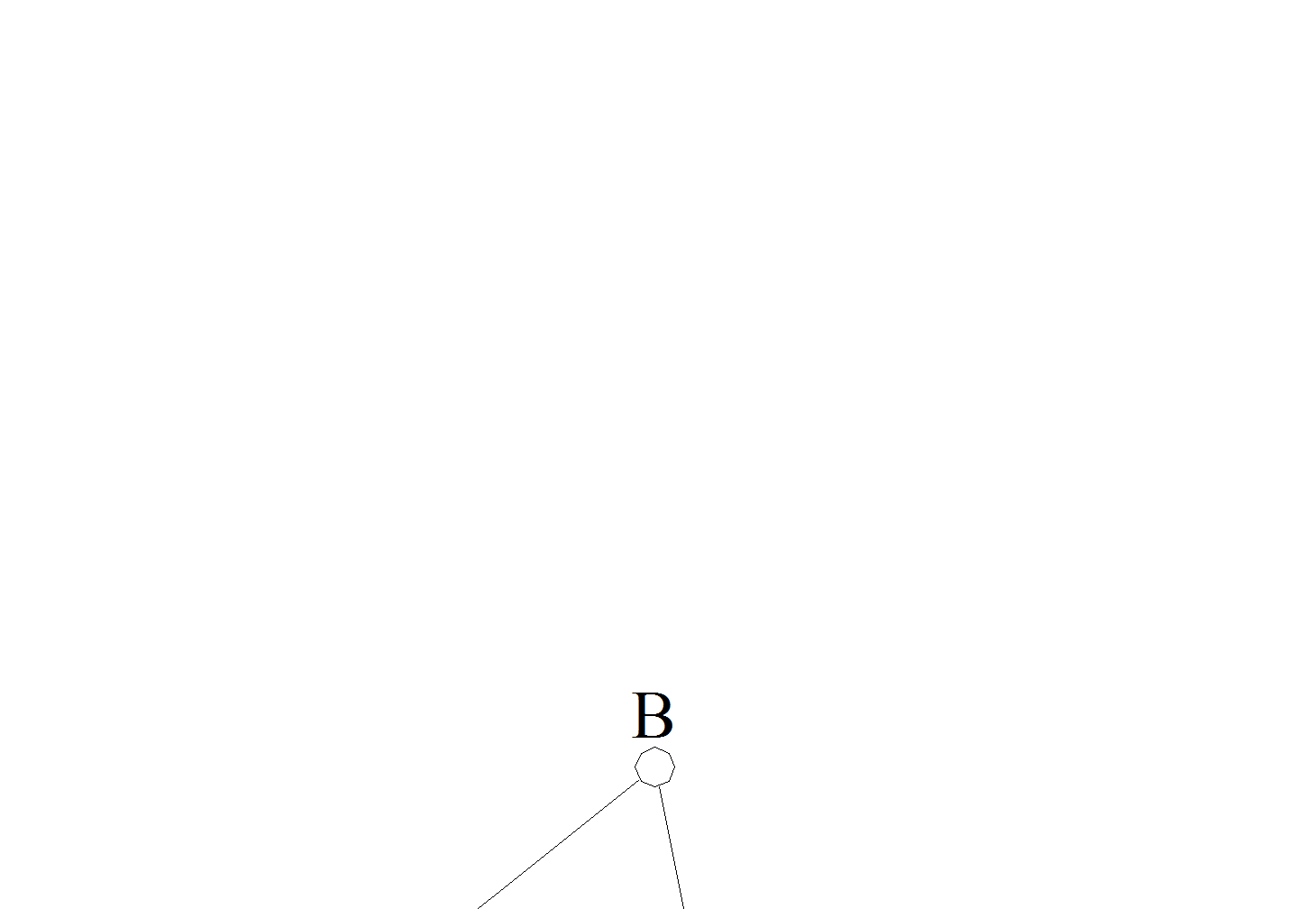
Рис. 27.9. Способы задания положения плоскости в пространстве.
Ниже для примера рассмотрим два из возможных вариантов позиционирующих устройств, обеспечивающих задание положения плоскости в пространстве.
1 вариант. Задание плоскости по трем опорным точкам (рис. 27.10). Позиционер включает в себя опорную площадку 1, на которой размещаются три устройства 2, обеспечивающие трехкоординатные перемещения связанных 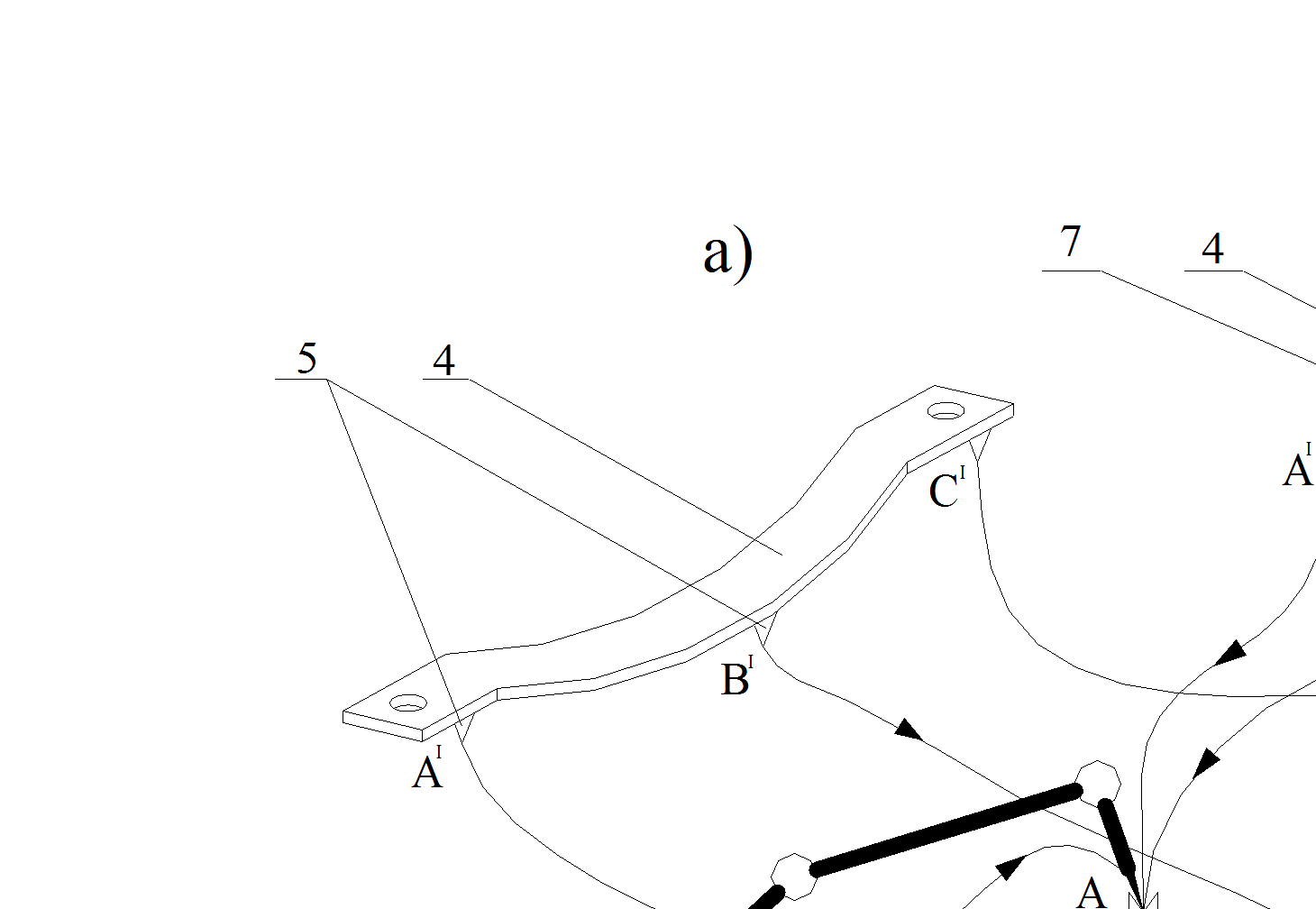
с ними носителей опорных базовых точек позиционера 3.
Рис. 27.10. Конструктивная схема позиционера, определяющего три опорные точки.
Конструкция носителя опорной базовой точки позиционера 3 зависит от используемого средства инструментального контроля пространственных координат точки (ЛОТС или КИМ). Базирующий элемент сборочной оснастки 4 связан с носителями монтажных базовых точек 5, геометрический профиль которых является ответным профилю носителей опорных базовых точек позиционера 3. Носители монтажных базовых точек 5 могут быть непосредственно связаны с базирующим элементом (вариант а), обеспечивая, таким образом, схему прямого базирования, либо через посредство переходных калибров 7 (вариант б), либо установлены на промежуточную универсальную монтажную площадку 6. С монтажной площадкой 6 базирующий элемент 4 связан через промежуточный калибр 7, относительно теоретических баз которого по электронному макету агрегата или монтажного эталона рассчитываются координаты опорных точек 5, реализуя, таким образом, схему косвенного способа базирования (вариант в).
Работа позиционера состоит в следующем. Поскольку положение базирующего элемента 4 однозначно определяются расчетным положением носителей его монтажных базовых точек 5 А1В1С1, позиционирование заключается в задании ответных положений носителей опорных базовых точек позиционера 3 А,В,С. Для этого опорную площадку 1 выставляют в пространстве стапеля с приближенным ориентированием (± 20…30 мм) и жестко фиксируют относительно каркаса стапеля. Фиксация опорной площадки относительно каркаса стапеля может осуществляться либо непосредственно относительно элементов каркаса (колонн, балок), либо на специальной стойке или балке связанной с каркасом стапеля. Для реализации схемы позиционирования это не имеет существенного значения, поэтому пока эту задачу рассматривать не будем. Далее, с помощью инструментальной системы контроля пространственных координат 8 (КИМ или ЛОТС) контролируется положение опорных базовых точек позиционера 3, и, с учетом имеющихся рассогласований, последовательно и независимо для каждой опорной базовой точки с помощью устройств трехкоординатных перемещений устанавливается положение координат опорных базовых точек 3 А,В,С в соответствии с расчетными. Все манипуляции позиционирования опорных базовых точек 3 выполняются под контролем инструментальной системы 8. После установки положения опорных базовых точек позиционера 3 в монтажное положение и окончательного контроля ответные носители базовых точек конструктивных баз монтажной А1В1С1и опорной А,В,С площадок совмещаются и взаимно фиксируются. Таким образом, базирующий элемент стапеля занимает монтажное положение.
2 вариант. Задание плоскости по прямой и внешней точке (рис. 27.11). В данном варианте установка базирующего элемента также может выполняться либо по прямому, либо по косвенному способам базирования. Поэтому рассмотрим только схему позиционирования опорных базовых точек позиционера. Позиционер включает в себя опорную площадку 1, относительно которой размещена опорная рама 2. Опорная рама 2 имеет треугольную форму и одним из углов связана с опорной площадкой 1 с помощью шарового шарнира 3, на котором имеется носитель опорной базовой точки 4. Другой угол опорной рамы также посредством шарового шарнира 5 связан с опорной площадкой посредством телескопической опоры 6, основание которой имеет узел вращения с осью перпендикулярной стороне А-В треугольной опорной рамы 2. Шаровой шарнир 5 также одновременно является носителем опорной базовой точки 4. Третий угол опорной рамы 2 также посредством шарового шарнира 7 связан с опорной площадкой с помощью телескопической опоры 8, основание которой опирается на опорную площадку посредством шарового шарнира. На шаровом шарнире 7 также имеется носитель опорной базовой точки 4. Сама опорная площадка 1 установлена на устройство трехкоординатных перемещений 9, колонна которого дополнительно имеет возможность вращения вокруг вертикальной оси. Контроль позиционирования ведется с помощью инструментальной системы контроля пространственных координат 10. Такая компоновка позиционера фактически определяет цилиндрическую систему координат. Однако поскольку контроль ведется с помощью инструментальной системы контролирующей координаты точки в декартовой системе координат, расчет координат опорных точек по электронному макету изделия также будет производиться в декартовой системе координат.
Работает устройство следующим образом. С помощью устройства трехкоординатных перемещений 9 под контролем инструментальной системы контроля пространственных координат 10 устанавливается пространственное положение опорной базовой точки А шарового шарнира 3. Для позиционирования опорной базовой точки В, связанной с шаровым шарниром 5 выполняется двойная манипуляция: вначале выполняется расчетное угловое перемещение вокруг вертикальной оси колонны устройства трехкоординатных перемещений 9, а затем с помощью телескопической опоры 6 выполняется вертикальное угловое перемещение до заданного положения опорной точки В. Для перемещения в заданное положение опорной базовой точки С, связанной с шаровым шарниром 7, производится линейное перемещение вдоль телескопической опоры 8. Таким образом опорные базовые точки позиционера А,В,С занимают монтажное положение.
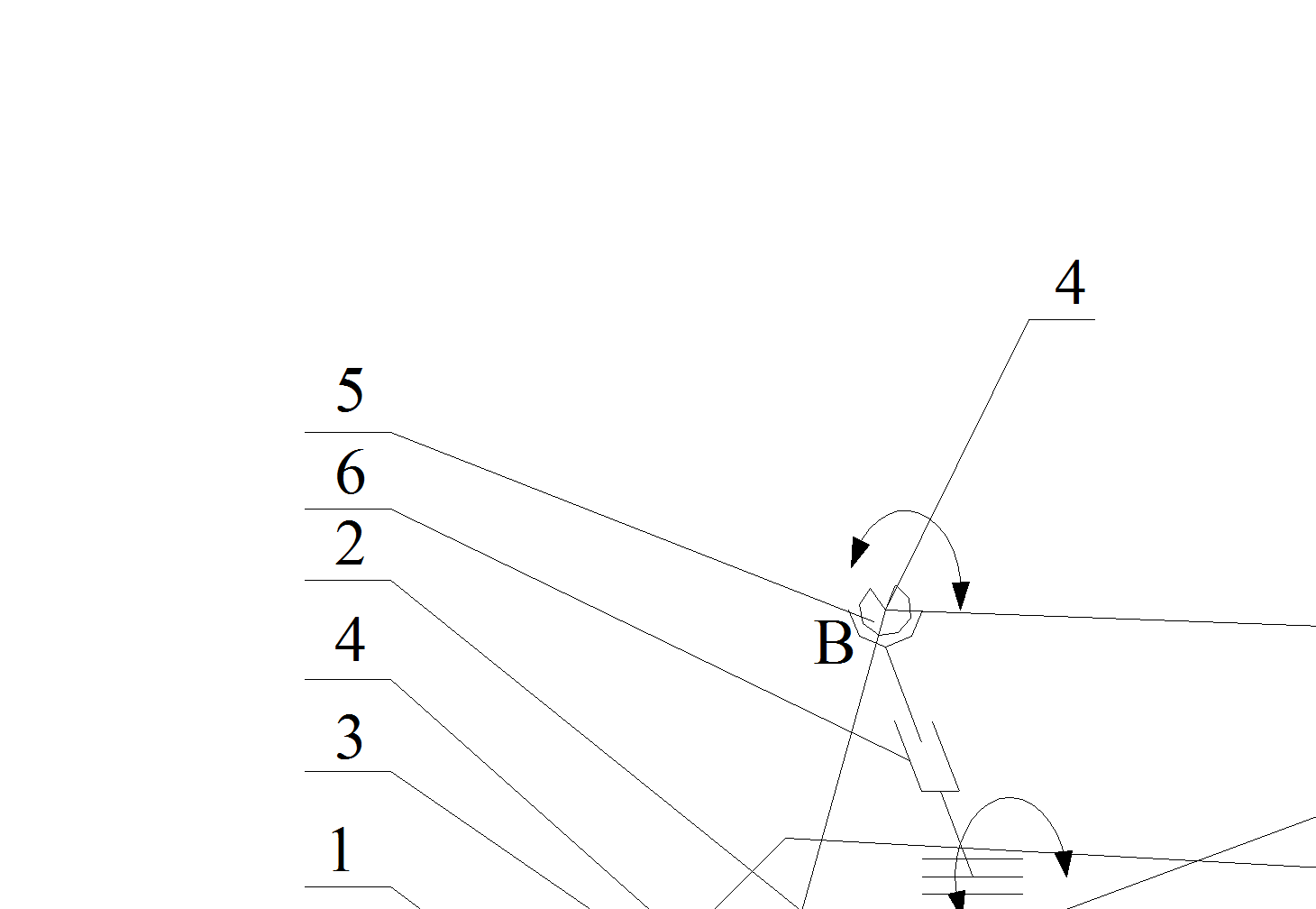
Рис. 27.11. Конструктивная схема позиционера, определяющего опорную плоскость
по вектору и внешней точке.
Конструктивное исполнение предложенных вариантов схем позиционирования базирующих элементов сборочной оснастки могут быть различными. Каждый из рассмотренных вариантов имеет свои достоинства и недостатки. Так, по второму варианту требуется лишь одно устройство трехкоординатных перемещений, что упрощает компоновочную схему. Однако исполнение шаровых опор позиционера технологически более сложно. Кроме того, при выполнении контроля координат опорных базовых точек требуется предварительная калибровка положения опорной площадки, так как все перемещения выполняются относительно нее.
Вопросы для самоконтроля:
1. Какие способы позиционирования существуют при монтаже СП?
2. Какие задачи решаются при монтаже СП с использованием МУММ?
3. Какие способы задания координат при позиционировании существуют?
4. Как осуществляется базирование по вспомогательным базам?
5. Как выбираются конструктивные базы базирующих элементов СП при их позиционировании с использованием МУММ?
6. Какие элементы позиционера являются носителями опорных (реперных) точек для КИМ?
7. Какова последовательность позиционирования БЭ СП при их монтаже (рассмотреть возможные схемы)?
Дата добавления: 2015-09-29; просмотров: 2121;