Выбор схем исполнительных механизмов БМП
Рычажные механизмыпредназначены для преобразования вида движения, воспроизведения функциональных зависимостей, выполнения математических операций и так далее.
Рычажные механизмы состоят из рычагов (стержней) и ползунов, соединённых в кинематические пары. Звенья в зависимости от видов движения называют кривошипом (поворот на угол 
 ), коромыслом (поворот на ограниченный угол), шатуном при сложном движении, ползуном при поступательном движении. Механизмы могут быть плоскими и пространственными, простыми и сложными.
), коромыслом (поворот на ограниченный угол), шатуном при сложном движении, ползуном при поступательном движении. Механизмы могут быть плоскими и пространственными, простыми и сложными.
Выбор структурной схемы рычажного механизма производят на основе требуемых движений ведущего и ведомого звеньев. Все виды рычажных механизмов по назначению подразделяются на три группы:
- для преобразования движения, например, непрерывного в возвратное;
- для передачи непрерывного движения;
- для передачи качательного движения (передача с ограниченным перемещением звеньев).
В состав рычажных механизмов входят только вращательные и поступательные кинематические пары. Благодаря этому рычажные механизмы могут передавать значительно большие усилия и мощности по сравнению с любыми другими механизмами в аналогичных условиях. Рычажные механизмы обладают высоким КПД, поскольку низшие пары смазываются лучше, чем высшие. В этих механизмах широко применяются подшипники качения. Звенья рычажных механизмов проще изготовить, чем кулачки и ли зубчатые колёса.
Рычажные механизмы широко применяются в различных механизмах бытового назначения: в швейных и обувных машинах, в гладильных прессах, в приводах стиральных машин и центрифуг и так далее. Особенно широкое применение среди рычажных механизмов получили кривошипно-ползунные механизмы (рис 4.2).
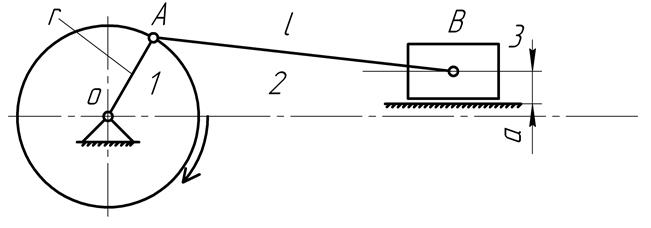
Рис 4.2. Схема кривошипно-ползунного механизма.
1 – кривошип; 2 – шатун; 3 – ползун.
Зубчатые механизмы применяют для передачи вращательного движения с одновременным изменением угловой скорости и передаваемого момента. Зубчатые механизмы широко применяются в машинах швейного и обувного производства, в машинах химической чистки одежды и стирки белья. Элементарные зубчатые механизмы могут быть простыми с неподвижными геометрическими осями и сателлитными подвижными осями.
Расчёт зубчатых механизмов с неподвижными осями при известном передаточном отношении заключается в определении чисел зубьев, в выборе параметров корригирования колёс, определении нагрузки на зубья. Расчёт сателлитных передач связан с необходимостью обеспечения соосности, установления возможно большего числа сателлитов с целью уменьшения нагрузки на каждую пару зубьев и так далее.
Кулачковые механизмыприменяются для воспроизведения любой заданной функции положения. Простейший кулачковый механизм состоит из ведущего кулачка 1, ведомого звена 2и стойки 3 (рис.4.3).Ведомое звено называют толкателем при его поступательном движении и коромыслом при вращательном движении.

Рис.4.3. Кулачковый механизм.
1 – кулачок; 2 – толкатель; 3 – стойка; 4 – ролик.
Кулачковые механизмы разделяют по следующим признакам:
- по назначению – на функциональные и операционные;
- по числу степеней свободы – на механизмы с одной и двумя степенями свободы;
- по виду движения ведущего звена – с вращающимися кулачками и с поступательно-перемещающимися кулачковыми линейками;
- по форме кулачка – на дисковые, плоские, цилиндрические пазовые и торцевые, коноидные;
- по конструктивной форме наконечника толкателя или коромысла – с остроконечным, сферическим, роликовым и плоским наконечником;
- по способу замыкания кулачка и толкателя – с геометрическим, например, с помощью паза, и силовым замыканием.
Недостатком кулачковых механизмов является необходимость силового или геометрического замыкания, что вызывает значительные нагрузки на звенья механизма и их быстрый износ. Основные размеры кулачкового механизма выбирают из условия выполнения заданных ограничений, из которых важнейшим является ограничение по углу давления на ведомое звено.
Кулачковые механизмы широко применяются в швейных и обувных машинах, в машинах-автоматах и в механизмах систем автоматического управления.
Шаговые механизмы всегда имеют ведомое звено, движущееся в одну сторону с периодическими остановками.
В зависимости от характера движения ведущего звена шаговые механизмы делятся на три группы:
- с неограниченным движением ведущего звена – мальтийские механизмы;
- с возвратным движением ведущего звена – храповые механизмы;
- с управляющим движением звена, например, храповой или анкерный механизмы, у которых храповое колесо вращается под действием движущего момента, а его вращение ограничивается управляющим звеном (храповиком, анкерной вилкой).
Шаговые механизмы применяют в швейных и обувных машинах, в дозирующих устройствах различных машин и приборов.
В фрикционных механизмах движение от ведущего звена к ведомому передаётся только с помощью сил трения, поэтому эти механизмы передают меньшую мощность по сравнению с зубчатыми.
Фрикционные пары в виде колёс бывают цилиндрическими, коническими и лобовыми, которые взаимодействуют между собой либо непосредственно, либо через промежуточное звено.
Фрикционные механизмы валкового типа применяют в машинах обувного производства, в гладильном оборудовании швейного производства, в оборудовании химчистки.
Помимо рассмотренных механизмов, широкое применение получили механизмы, в состав которых входят упругие, гибкие, жидкие и газообразные тела.
К упругим звеньям относят пружины, мембраны и другие упруго-деформируемые тела.
К жидким и газообразным телам относят масло, воздух, газ, воду и другие тела, перемещаемые по специальным коммуникациям внутри машины.
Механизмы с гибкими звеньями применяют в тех случаях, когда в исполнительном механизме требуется получить непрерывное поступательное движение ведомого звена и когда не требуется строгое соблюдения постоянства передаточного отношения.
Гидравлические и пневматические механизмы обеспечивают сравнительно лёгкую возможность бесступенчатого регулирования скоростей в широком диапазоне, охватывающем не только наладку, но и регулирование режима работы в процессе выполнения технологических операций. Быстрота срабатывания и чувствительность этих механизмов позволяют использовать их для усиления командных импульсов, благодаря чему они нашли широкое применение в системах управления машинами. Гидравлические и пневматические механизмы просты, экономичны и надёжны в работе. Однако, гидравлические и пневматические механизмы имеют ряд недостатков:
- невозможность сохранения постоянства передаточного отношения механизма из-за изменения параметров рабочего тела (температуры, вязкости);
- наличие у пневматических устройств неравномерного движения ведомого звена при переменной внешней нагрузке за счёт упругости воздуха;
- снижения КПД системы за счёт утечки жидкости через неплотности в соединениях;
- высокая точность изготовления сопрягаемых деталей гидравлических и пневматических устройств.
Гидравлические и пневматические механизмы находят широкое применение в различных прессах и других машинах.
Дата добавления: 2015-09-25; просмотров: 2369;