Разработка кинематической схемы машины.
Кинематическая, гидравлическая, пневматическая схемы машины отражают соответствующие принципы взаимодействия и работы элементов машины. Эти схемы дают представление о том, как механическая энергия и движение передаются от источника до пункта её потребления и преобразования. Схемы являются принципиальными и позволяют установить, какие элементы и сколько их входят в устройство и в каких сочетаниях (кинематических парах) они объединяются.
Кинематические схемы вычерчивают в виде плоскостного (вид спереди и вид сбоку) и пространственного изображений. На кинематической схеме указывают наименование каждой кинематической группы элементов и основные характеристики и параметры кинематических элементов. Если кинематическая схема служит для динамического анализа, то на ней указывают необходимые размеры и характеристики элементов. Каждому кинематическому элементу на схеме присваивают порядковый номер, валы нумеруют римскими цифрами, а остальные элементы – арабскими.
На кинематических схемах указывают тип, мощность и частоту вращения электродвигателей, размер, исполнение и передаточное отношение редукторов, диаметр и ширину шкивов, типы и количество клиновых ремней, число зубьев и модули зубчатых передач, число заходов, шаг и направление нагрузки червяков и так далее.
В качестве примера на рис. 4.1 приведена кинематическая схема двухступенчатого редуктора [2].
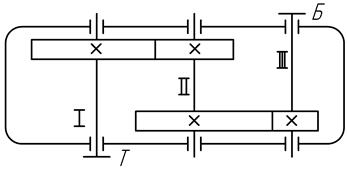 Рис.4.1. Кинематическая схема двухступенчатого редуктора.
Рис.4.1. Кинематическая схема двухступенчатого редуктора.
I (Т) - тихоходный вал; II - промежуточный вал;
III (Б) – быстроходный вал.
Конечной целью проектирования кинематической схемы машины является воспроизведение заданных движений рабочих органов. При проектировании необходимо учитывать динамические свойства механизмов, так как они определяют динамические нагрузки и характер движения звеньев кинематических цепей.
В основе расчёта кинематических цепей механизмов лежат две задачи динамики: по известному закону движения ведущего звена определить силы, приложенные к звеньям механизма и по известным силам определить закон движения по уравнениям Лагранжа.
Первая задача решается методом кинетостатики по уравнению Даламбера [1]. Так, например, для кинематической цепи, трансформирующей кратные круговые движения
 (4.1)
(4.1)
где МКР = МДВ - крутящий и движущий моменты; МС – момент сопротивления; J - момент инерции.
Вторая задача заключается в определении закона движения в соответствии с уравнением Лагранжа. Так, для кинематической цепи, реализующей линейно-круговые движения, уравнение Лагранжа имеет вид:
 (4.2)
(4.2)
где РДВ и Р С - сила движущая и сила сопротивления; Jпр и mпр- приведённые моменты инерции и масса; Z - количество элементов кинематической цепи.
Гидравлические и пневматические механизмы являются завершающими элементами в гидро – и пневмосистемах, в которых, помимо этих механизмов, имеются двигатели – насосы, регуляторы давления и расхода рабочего тела (масла, воздух); распределители и переключатели потоков рабочих тел, контрольно-измерительные приборы и так далее.
Перечень элементов кинематических, гидравлических и пневматических схем оформляют в виде таблицы. На полях схем допускается указывать данные, необходимые для монтажа, испытания и проверки системы: маркировка трубопроводов, рабочие среды, рабочие давления, температуру и др. На рис. 4.2 показана гидравлическая схема механизма для приведения в движение силового поршня, шток которого связан с рабочим органом машины.
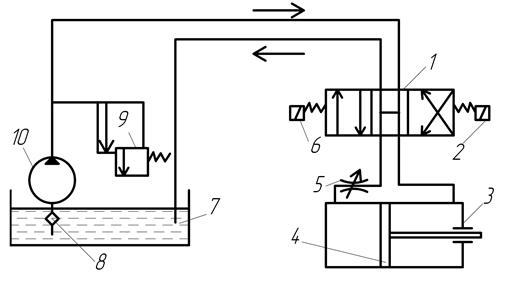
Рис.4.2 Гидравлическая схема механизма.
1 – распределитель; 2,6 – электромагниты; 3 – гидроцилиндр; 4 – поршень; 5 – тормозное устройство; 7 – масляный бак; 8 – фильтр; 9 – клапан переливной; 10 – гидронасос.
Схема пневматического механизма имеет аналогичный вид, только насос заменяется источником сжатого воздуха (компрессором), а выброс отработавшего воздуха производится в атмосферу.
Совокупность кинематических, гидравлических и пневматических элементов и устройств на схемах изображают в виде условных графических символов (рис.4.1; 4.2)
4.2 Методы расчёта механизмов при проектировании БМП
Кинематический расчёт выполняют с целью выбора типа механизма и определения таких размеров его звеньев, при которых механизм обеспечивает перемещение исполнительного органа по заданному закону в соответствии с требованиями технологического процесса.
Кинематические параметры механизмов определяют динамичность технологических нагрузок, давлений в кинематических парах и напряжений в звеньях механизмов.
Методы определения размеров звеньев и расчёта элементов кинематических пар для механизмов различных типов различны.
Основными задачами силового расчёта механизмов являются задачи определения при заданных условиях давления в кинематических парах; определение величины и закона движущих сил, размеров звеньев, обеспечивающих оптимальные динамические условия работы механизма.
Для удовлетворения требований работоспособности механизма его звенья и кинематические пары должны быть правильно рассчитаны.
К тихоходным механизмам применят статический метод силового расчета, при котором учитываются все действующие на механизм нагрузки, кроме инерционных.
К быстроходным машинам применяют кинетостатический метод расчета с учётом всех действующих сил, включая силы инерции.
В результате кинетостатического расчета можно определить давление в кинематических парах, силы, воздействующие на звенья; а также определить движущую силу, обеспечивающую движение механизма, нагруженного внешними силами:
РДВ = РС + РИ (  m) (4.3)
m) (4.3)
где РС и РИ (  ,m) – силы сопротивления и инерции, приведённые к главному звену; и m - ускорение и масса звена приведения.
,m) – силы сопротивления и инерции, приведённые к главному звену; и m - ускорение и масса звена приведения.
При динамическом проектировании новых механизмов сначала задаются приближённым законом движения ведущих звеньев механизма и внешними силами, а затем после определения конструктивных размеров звеньев решают вопрос об истинном движении спроектированного механизма с учётом различных действующих на него сил. После этого в ранее выполненный расчёт вносят необходимые коррективы.
Дата добавления: 2015-09-25; просмотров: 5357;