Линеаризация вход-состояние
Рассмотрим задачу регулирования применительно к объекту с одним входным сигналом u, описываемому нелинейным уравнением
 .
.
Технология линеаризации вход-выход решает эту задачу в два шага:
- Найти преобразование состояния  и преобразование входного сигнала
и преобразование входного сигнала  такие, что динамика нелинейного объекта трансформируется в динамику эквивалентного линейного объекта, описываемого уравнением
такие, что динамика нелинейного объекта трансформируется в динамику эквивалентного линейного объекта, описываемого уравнением  .
.
- Использовать стандартные методы линейной теории управления, чтобы спроектировать управление uэ.
Пример. Рассмотрим нелинейный объект второго порядка
 (6)
(6)
Даже хотя спроектированный линейный регулятор может стабилизировать объект в малой окрестности точки равновесия (0,0), но совершенно не очевидно, что этот регулятор может стабилизировать его в целом. Специфическая трудность заключена в нелинейности, входящей в первое уравнение состояния (6), т.к. она не может быть сокращена с помощью управляющего сигнала u.
Рассмотрим следующее преобразование состояния
 (7)
(7)
которое преобразует (6) в
 (8)
(8)
Заметим, что новые уравнения состояния также имеют состояние равновесия в точке (0,0). Теперь нелинейности могут быть сокращены с помощью закона управления в виде
 (9)
(9)
где uэ эквивалентное управление (эквивалентное в том смысле, что определение uэравносильно определению u и наоборот). Этот закон приводит к линейным уравнениям состояния
 (10)
(10)
Итак, проблема стабилизации исходного нелинейного объекта, описываемого уравнениями (6) и использующего исходный управляющий сигнал u, с помощью преобразования состояния (7) и преобразования управления (9) сводится к проблеме стабилизации преобразованного объекта, используя новый управляющий сигнал uэ. Теперь рассмотрим преобразованный объект, описываемый уравнениями (10). Нетрудно показать, что он является не только линейным, но и полностью управляемым. Используя хорошо известный линейный закон управления с обратной связью по состоянию  , и выбирая коэффициенты
, и выбирая коэффициенты  =2,
=2,  =0, так что
=0, так что
 , (11)
, (11)
получаем устойчивый преобразованный объект, описываемый уравнениями  и
и  . В рамках исходного вектора состояния найденный закон управления соответствует исходному управлению
. В рамках исходного вектора состояния найденный закон управления соответствует исходному управлению
 . (12)
. (12)
Исходное состояние xсвязано с z посредством соотношений
 (13)
(13)
Структурная схема замкнутой системы с полученным выше законом управления представлена на рис. 1.
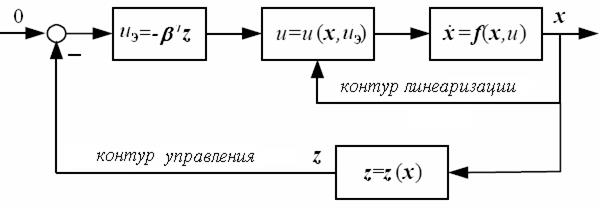
Рис. 1
Замечание. Чтобы обобщить приведенный выше метод нужно ответить на два вопроса:
- Какие классы нелинейных систем могут быть преобразованы в линейные системы?
- Каким путем можно найти соответствующие преобразования для тех систем, которые в принципе могут быть преобразованы в линейные
системы?
Дата добавления: 2015-08-14; просмотров: 1017;