Лекция 17. Однако такое отображение не является взаимно однозначным, поскольку несколько точек на р - плоскости в соответствии с равенством
Однако такое отображение не является взаимно однозначным, поскольку несколько точек на р - плоскости в соответствии с равенством
 ,
, 
отображаются в одну точку на z-плоскости (рис.13). Это еще одна иллюстрация эффекта поглощения частоты (см. ниже).
Для основной полосы Po (рис. 13) существует простая связь между полюсами непрерывного и дискретного объекта управления.
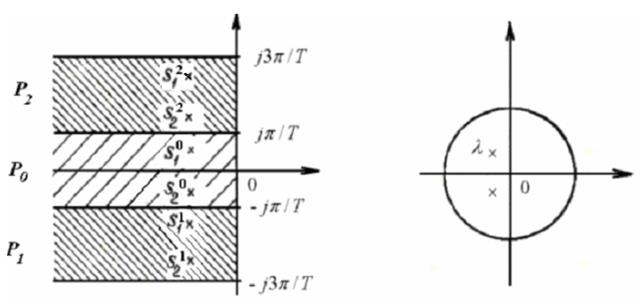
Рис. 13
Каждая полоса Pk , k=0,1,2,…, на левой P - полуплоскости отображается в единичный круг Z. Это означает, что пары полюсов  отображаются в пару полюсов
отображаются в пару полюсов  .
.
Пример. Рассмотрим непрерывный объект с ПФ
 . (38)
. (38)
Полюса соответствующего дискретного объекта
находятся из характеристического уравнения
 ,
,
где
 ,
,
 .
.
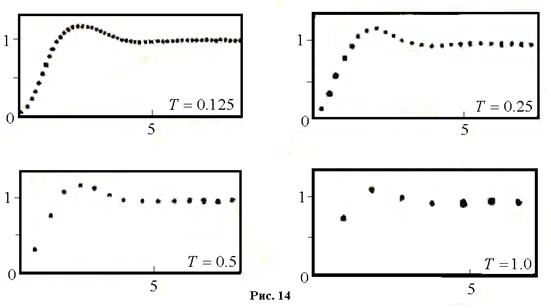
Реакции этой цифровой системы (дискретного объекта) на ступенчатое воздействие для различных значений периода дискретизации Т при  и
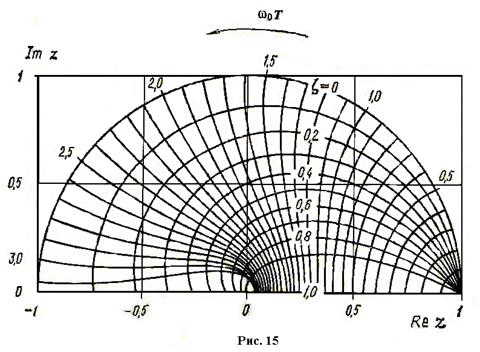
и  показаны на рис. 14, а отображение полюсов непрерывного объекта в единичный круг при его дискретизации для различных значений
показаны на рис. 14, а отображение полюсов непрерывного объекта в единичный круг при его дискретизации для различных значений  и
и  - на рис. 15. Время установления ty =1c.
- на рис. 15. Время установления ty =1c.
Для цифровой системы высокого порядка:
Если полюсы расположены близко к z=1, то колебания медленно затухают.
Если нули расположены близко к z=1, то имеет место большое перерегулирование.
Higher order systems
_ as pole comes closer to z=1, the system slows down
_ as zero comes closer to z=1, causes overshoot
_ as pole and zero come close to each other, they tend to cancel each other
Dead-beat control. In digital domain we can do several things not possible in continuous domain,
e.g. pole-zero cancellation, or suppose we set all closed loop poles to z = 0.
Consider closed loop response
b1z3 + b2z2 + b3z + b4
z4 = b1z1 + b2z2 + b3z3 + b4z4
All poles are at 0. This is called dead-beat control.
Дата добавления: 2015-08-14; просмотров: 1012;