Вопрос №32. Движение частицы по поверхности лопасти ротора.
Анализируя рабочий процесс взаимодействия ротора со снегом, можно выделить следующие операции: захват снега лопастью; перемещение снега вдоль лопасти; движение снега по кожуху ротора к выбросному отверстию; движение снега по направляющему устройству.
Для упрощения математического описания рабочего процесса в роторе исключены силы взаимодействия между отдельными частицами снега и анализируется поведение отдельно взятой материальной частицы на прямолинейной лопасти с момента ее поступления на лопасть до момента, когда частица достигла края лопасти.
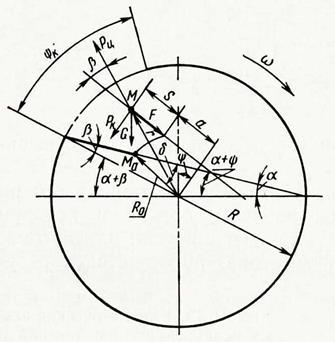
Рис. 26. Схема сил, приложенных к материальной частице, движущейся по вращающейся лопасти ротора.
В наиболее общем случае лопасть расположена в роторе под некоторым произвольным углом β к радиусу R (рис. 26), а угловая скорость вращения ротора
ω = const.
Пусть начальное положение лопасти с горизонтальной осью ротора в момент ее подхода к выбросному отверстию определяется углом α, а начальное положение рассматриваемой частицы М0на лопасти — радиусом R0. Так как ротор вращается с постоянной угловой скоростью, то за отрезок времени t лопасть повернется вокруг оси ротора на угол ψ = ωt, а частица перейдет в точку М, определяемую радиусом r, и, двигаясь по лопасти со скоростью vотн, пройдет за это иремя путь
 .
.
Лопасть к этому моменту займет положение, определяемое углом наклона ее к горизонту (α + ψ).
На рассматриваемую частицу массой т, расположенную в точке М, действуют сила тяжести G, центробежная сила Рц, кориолисова сила инерции Рки сила трения F, вызываемая силой тяжести, кориолисовой силой инерции и центробежной силой.
Обозначив через а расстояние от начального положения частицы до перпендикуляра, опущенного на лопасть из центра вращения ротора, и спроектировав все силы, приложенные к частице, на направление лопасти, получим уравнение динамического равновесия частицы в следующем виде:
 = Рц.т.- Gsin(α + ψ) - F,(1)
= Рц.т.- Gsin(α + ψ) - F,(1)
где Рц.т. — проекция центробежной силы инерции на направление лопасти; Рц.т. = тω2 (α+ s); F — сила трения; F = μ1 [Рк + G cos (α + ψ) — Рц.н.] (здесь μ1 = tg ρ0 — коэффициент внешнего трения; Рц.н. — проекция центробежной силы на нормаль к лопасти; Рц.н = mω2R sin β).
После подстановки значений Рц.т., F, Рц.н. в выражение (1) и t = ψ/ω, а также сокращения всех членов на массу, получаем неоднородное линейное дифференциальное уравнение второго порядка
 . (2)
. (2)
Обозначив а + s + μ1R sin β = х, дифференциальное уравнение примет следующий вид:
 (3)
(3)
Решая дифференциальное уравнение, получаем
х =  . (4)
. (4)
Таким образом, путь s, пройденный частицей по лопасти за время t, и относительная скорость частицы vотн за время t
s =  ; (5)
; (5)
vотн=  . (6)
. (6)
Используя граничные условия (при t = 0, s = 0 и voтн= 0), находим произвольные постоянные
 ; (7)
; (7)
 ; (8)
; (8)
Так как а = R cos δ и R0sin δ = R sin β, то
а + μ1R sin β = R0 (cos δ + μ1sinδ) = R0 cos (ρ0 — δ) cos ρ0.
Следовательно,
 (9)
(9)
 (10)
(10)
где К1 = 1 — sin ρ0/cos ρ0; К2= — (1 + sin ρ0)/cos ρ0
Выражения (9) и (10) определяют характер движения частицы по лопасти в общем случае, когда учтены все силы, приложенные к частице, и наружный край лопасти по ходу вращения ротора откинут назад. Очевидно, что когда он закинут вперед, знак перед δ должен быть заменен на обратный, а для радиальной лопасти
δ = 0.
Для упрощения полученных выражений, а также учитывая малую силу тяжести частицы снега по сравнению с силами инерции, принимают G = 0, и выражения (9) и (10) будут иметь вид
 ; (11)
; (11)
 . (12)
. (12)
Из приведенных выражений можно определить конечную относительную скорость частицы vотн.к , если вместо s подставить его значение
sк = R cos β — R0 cos δ, соответствующее ψ= ψк.
При радиальном расположении лопастей роторов р = 0 и δ = 0, и конечная относительная скорость определяется из условия s = R — R0.
Так как cos ρ0/2 = l/( К1 — К2), то из выражений (11) и (12) получаем, что при радиальном расположении лопастей
R=  ;(13)
;(13)
vотн.к =  ;(14)
;(14)
Абсолютная скорость частицы vа на выходе из ротора, равная геометрической сумме относительной vотн.к и переносной скорости vпер, в общем случае
va=  . (15)
. (15)
При радиальном расположении лопастей
va=  ,
,
где vпер = ωR— окружная скорость лопасти.
Дата добавления: 2015-08-11; просмотров: 2294;