Построение вложенных марковских цепей для моделирования систем при изменении параметра потока отказов программных средств
Рассматриваемые в данном разделе ВМЦ, учитывающие изменения параметра потока отказа программных средств, строятся на базе БММ №1. Далее исследуются многофрагментные модели типовых архитектур СВГ.
Исследуем первую архитектуру S21.
Система имеет два аппаратных канала. Программные средства, используемые каналами одинаковые. Средства реконфигурации после отказа одного из каналов вследствие ДФ отсутствуют. ССН и размеченный граф функционирования представлены на рис. 3.2. Граф описывает три состояния:
- S1 – состояние, в котором система работоспособна;
- S2 – состояние, которое характеризуется отказом одного из каналов по аппаратной компоненте (проявление физического дефекта);
- S3 – состояние отказа системы по программной компоненте (проявление ДП ПС).
Граф, приведенный на рисунке 3.2, является однофрагментным, так как в нем не учтены параметры, определяющие изменение надежности аппаратной и программной компонент. Опираясь на описанные ранее БММ можно перейти к количественному анализу надежности выбранных систем.
На основе БММ 1 и однофрагментной модели рисунке 3.2 получим многофрагментный марковский граф функционирования системы S21 (рис. 3.7). Набор параметров модели следующий: λдп=var (изменяется при переходе из одного фрагмента в другой, т.к. Δλдп=const); μвп=const. Этот вариант можно описать набором следующих выражений:
 (3.17)
(3.17)
где Тдп(н) – среднее время между проявлениями ДП ПС;
Твп(n) – среднее время восстановления после проявления ДП ПС в одном из внутренних фрагментов.
Рис. 3.7 – Размеченный граф (ВМЦ) функционирования СВГ S21 построенный в соответствии с БММ 1
ВМЦ содержит следующие состояния:
- SF1={S1,S4,…,S3n+1} – множество состояний, в которых система работоспособна. Исходные состояния для всех видов фрагментов (начального, внутренних и конечного);
- SF2={S2,S5,…,S3n+2} - множество состояний, в которых произошел отказ одного из каналов АС;
- SF3={S3,S6,…,S3n+3} - множество состояний, в которых произошел отказ ПС.
Логика функционирования системы состоит в следующем. Реализуется схема простого поканального сравнения. Отказ системы по АС одного из каналов приводит к отказу всей системы. В начальный момент времени система реализует все предписанные функции и находится в состоянии S1. В случайный момент времени проявляются ДП ПС или возникают ДФ АС. При проявлении ДФ АС система переходит в состояние S2 с интенсивностью 2λдф. Далее с интенсивностью μдф система восстанавливается. При проявлении ДП ПС система переходит в состояние S3 с интенсивностью λдп и с интенсивностью μвп восстанавливается, переходя во второй фрагмент графа (состояние S4). Согласуясь с принятыми допущениями, после каждого события, связанного с интенсивностью проявления ДП ПС, величина интенсивности λдп уменьшается на постоянную величину Δλдп. Величина интенсивности μвп остается постоянной. Величина интенсивности λдп вычисляется с использованием выражения
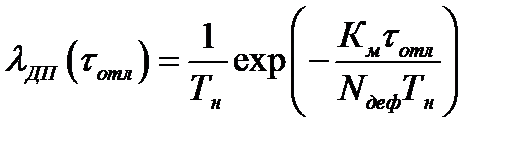 . (3.18)
. (3.18)
Число фрагментов определяется из следующего соотношения:
 (3.19)
(3.19)
Система ведет себя аналогично во всех внутренних фрагментах. В конечном фрагменте все ДП ПС устранены (согласно принятому допущению) и нарушение функционирования системы может быть вызвано только ДФ АС.
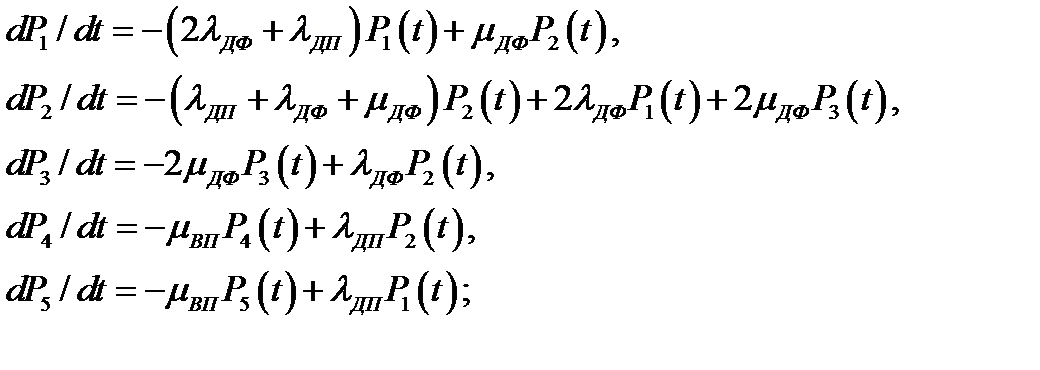
СДУ Колмогорова, построенная на основе графа (рис. 3.7) имеет следующий вид:
для начального фрагмента Фн
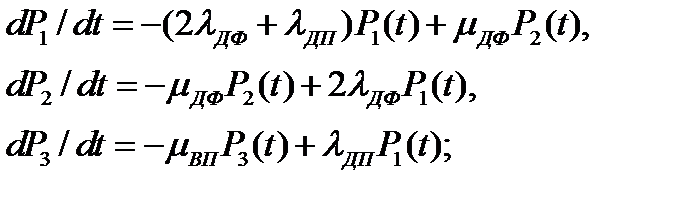 (3.20)
(3.20)
для внутренних фрагментов Фвн i

для конечного фрагмента Фк

начальные условия

Функция готовности определяется как сумма вероятностей нахождения системы в работоспособных состояниях SF1={S1,S4,…,S3n+1}.
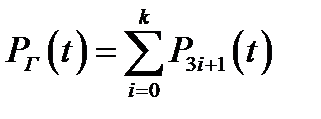 . (3.21)
. (3.21)
Функция оперативной готовности определяется как
 . (3.22)
. (3.22)
Базовая архитектура построения СВГ S22 представлена на рис. 3.6(а). Основная отличительная особенность такого построения заключается в том, что каждый аппаратный канал работает под управлением индивидуальной версии ПС. Очевидно, что применение такого варианта позволяет парировать часть ДП ПС (однотипных дефектов).
В соответствии с БММ 1 набор параметров модели следующий: λдп=var (изменяется при переходе из одного фрагмента в другой, т.к. Δλдп=const); μвп=const. Для построения многофрагментой марковской модели принимается дополнительное допущение о том, что λдп (1) = λдп(2), где λдп (1) и λдп(2) – интенсивности проявления ДП ПС программных версий V1 и V2. Тогда суммарная интенсивность определяется как:
Λдп= λдп (1) + λдп(2). (3.23)
Многофрагментный марковский граф представлен на рис. 3.8.
Рис. 3.8 – Размеченный граф (ВМЦ) функционирования системы S22, построенная в соответствии с БММ 1
Логика функционирования системы подобна описанной для архитектуры S21.
В случае, если начальное количество ДП ПС Nдеф=6, граф состояний и переходов будет содержать 7 фрагментов и выражение для вычисления функции готовности будет следующим:
 . (3.24)
. (3.24)
СДУ Колмогорова будет имеет вид:

Рассмотрим архитектуру СВГ Sк21, представленную на рисунке 3.6(б). Данная архитектура имеет два аппаратных канала. ПС, используемые этими каналами, одинаковые. Каждый канал имеет встроенные средства контроля (ВСК). Применение встроенного контроля является эффективным средством повышения надежности. Особенностью функционирования системы с ВСК является возможность переключения в одноканальный режим в случае проявления ДФ АС. Переключение в одноканальный режим осуществляется средством реконфигурации (коммутатором).
В соответствии с БММ 1, набор параметров модели следующий: λдп=var (изменяется при переходе из одного фрагмента в другой, т.к. Δλдп=const); μвп=const. Многофрагментный марковский граф представлен на рисунке 3.9.
Рис. 3.9 – Размеченный граф (ВМЦ) функционирования системы Sк21, построенная в соответствии с БММ 1
Граф, описывающий МФМ, содержит следующие состояния:
S1 – состояние, в котором система работоспособна (начальное состояние), во внутреннем фрагменте этому состоянию соответствует по физическому смыслу состояние S5i+1;
S2 – состояние скрытого отказа по ПC, во внутреннем фрагменте этому состоянию соответствует состояние S5i+5;
S3 – состояние обнаруженного отказа по АC (работоспособное состояние), которому во внутреннем фрагменте соответствует состояние S5i+2;
S4 – состояние обнаруженного отказа по АC (неработоспособное состояние), которому во внутреннем фрагменте соответствует состояние S5i+3;
S5 – состояние отказа одного канала по ПC, другого по АC (неработоспособное состояние), которому во внутреннем фрагменте соответствует состояние S5i+4;
S5k+1 – состояние, принадлежащее последнему фрагменту, в котором система работоспособна;
S5k+2 – состояние отказа одного канала по АC (состояние принадлежит последнему фрагменту);
S5k+3 – состояние отказа двух каналов по АC (состояние принадлежит последнему фрагменту).
Система дифференциальных уравнений, в обобщенном виде описывающая функционирование СВГ с архитектурой Sк21 имеет вид:
для начального фрагмента Фн
для внутренних фрагментов Фвн i
 (3.25)
(3.25)
для конечного фрагмента Фк

Выражение для вычисления функции готовности будет следующим:
 , (3.26)
, (3.26)
а для вычисления функции оперативной готовности:
 , (3.27)
, (3.27)
Дата добавления: 2015-08-11; просмотров: 1110;