Построение вложенных марковских цепей для моделирования систем при линейном изменении параметров потоков отказов и восстановлений программных средств
В соответствии с рассмотреной БММ 7, набор параметров модели следующий: λдп=var (изменяется при переходе из одного фрагмента в другой, т.к. Δλдп=const); μдп=var (изменяется при переходе из одного фрагмента в другой, т.к. Δμ=const). Эту ситуацию возможно описать набором выражений:
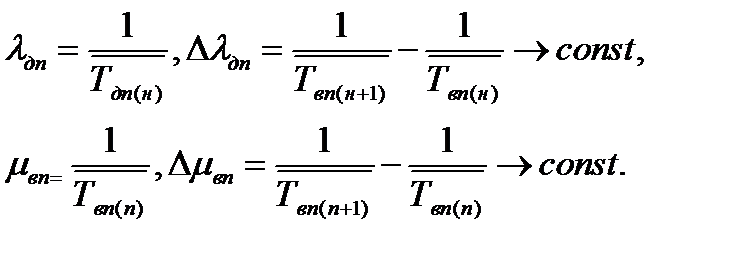 (3.28)
(3.28)
где Тдп(н) – среднее время между проявлениями ДП ПС;
Твп(n) – среднее время восстановления после проявления ДП ПС в одном из внутренних фрагментов.
Многофрагментный марковский граф СВГ S21 представлен на рис. 3.10.
Логика функционирования системы состоит в следующем. В начальный момент времени система реализует все предписанные функции и находится в состоянии S1. В следующий момент времени проявляются ДП ПС или возникают ДФ АС. При возникновении ДФ АС система переходит в состояние S2 c интенсивностью 2λдф. Далее с интенсивностью μдф система восстанавливается. При проявлении ДП ПС система переходит в состояние S3 и с интенсивностью μвп восстанавливается (состояние S4). В соответствии с принятым вариантом во внутренних фрагментах параметры μвп и λдп изменяются на величины Δμвп. Δ λдп.
Рис. 3.10 – Размеченный граф (ВМЦ) функционирования системы S21, построенный в соответствии с БММ 7
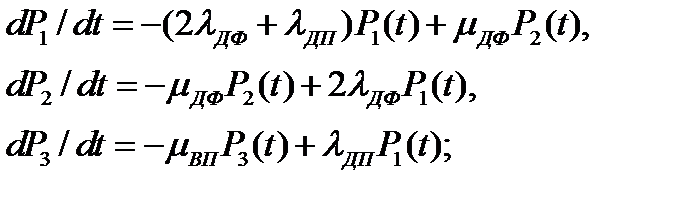
СДУ Колмогорова, построенная из графа (рис. 3.10) имеет следующий вид:
для начального фрагмента Фн
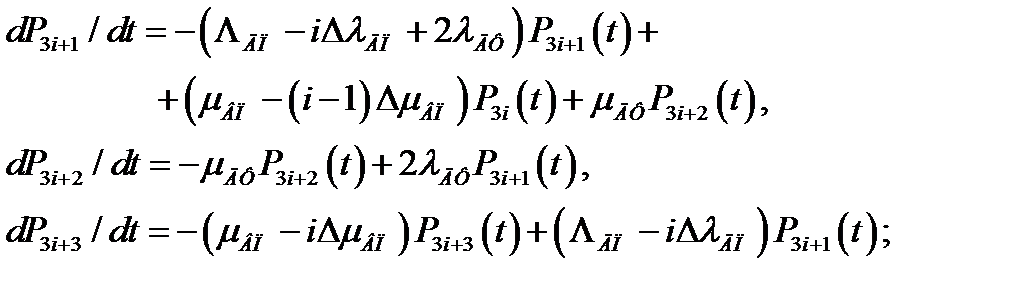
для внутренних фрагментов Фвн i
 (3.29)
(3.29)
для конечного фрагмента Фк

Функция готовности определяется как сумма вероятностей нахождения системы в работоспособных состояниях согласно
(3.21). Функция оперативной готовности определяется согласно (3.22).
Рассмотрим построение ВМЦ в соответствии с БММ 7 для СВГ с архитектурой S22.
Набор параметров модели следующий: λдп=var (изменяется при переходе из одного фрагмента в другой, т.к. Δλдп=const); μвп=var (изменяется при переходе из одного фрагмента в другой, т.к. Δμвп=const); λдп(1)=λдп(2), где λдп(1) и λдп(2) – интенсивности проявления ДП ПС программных версий V1 и V2.
Для построения многофрагментой марковской модели следует ввести два допущения.
Первое допущение:
μвп (1) = μвп(2),
где μвп(1) и μвп(2) – интенсивности восстановления после проявления ДП программных версий V1 и V2.
Второе допущение:
Δμвп (1) =Δμвп(2),
где Δμвп(1) и Δμвп(2) – величины изменения параметров μвп(1) и μвп(2) после устранения проявившегося ДП программных версий V1 и V2.
Указанные выше допущения, как правило, соответствуют действительности, так как для большинства современных программных продуктов регламентируются процедуры выявления причин отказов и сроки устранения ДП после их обнаружения [22]. Кроме того они не являются принципиальными, поскольку влияют только на размерность модели.
Следует отметить, что введение таких допущений не позволяет учесть особенности восстановления ПС разных информационных каналов, однако, на первом этапе, позволяет учитывать изменение времени при проведении процедур восстановления после проявления различных ДП ПС.
Многофрагментный марковский граф СВГ S22 представлен на рис. 3.11.
Логика функционирования системы состоит в следующем. В начальный момент времени система реализует все предписанные функции и находится в состоянии S1. В следующий момент времени проявляются ДП ПС или возникают ДФ АС. При возникновении ДФ АС система переходит в состояние S2 c интенсивностью 2λдф. Далее с интенсивностью μдф система восстанавливается. При проявлении ДП ПС система переходит в состояние S3 и с интенсивностью μвп восстанавливается (состояние S4). В соответствии с принятым вариантом во внутренних фрагментах параметры μвп и Λдп изменяются на величины Δμвп.и Δ λдп. Параметр μвп линейно уменьшается до величины μвп(min). Это значение определяется максимально допустимым временем восстановления ПС.
Рис. 3.11 – Размеченный граф (ВМЦ) функционирования системы S22, построенный в соответствии с БММ 7
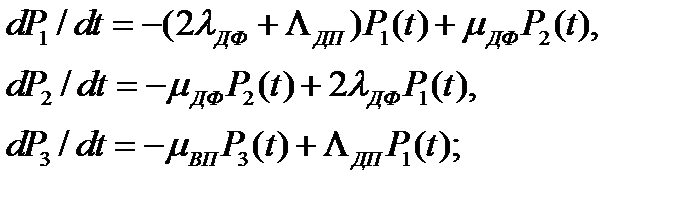
СДУ Колмогорова, построенная для графа (рис. 3.11), имеет следующий вид:
для начального фрагмента Фн
для внутренних фрагментов Фвн i
 (3.30)
(3.30)
для конечного фрагмента Фк
Функция готовности определяется по формуле (3.21), а функция оперативной готовности – по формуле (3.22).
Дата добавления: 2015-08-11; просмотров: 1096;