Параметры регулятора настраиваются так, чтобы минимизировать этот показатель.
Управляющий сигнал должен быть ограничен (в реальных приложениях) для того, чтобы избежать износа исполнительных механизмов. Вначале выбирается стратегия управления и критерий качества, а на их основе определяются параметры регулятора.
Цифровой вариант регулятора обладает дополнительными преимуществами:
- Проще обрабатывааются функции плавного перехода и предотвращения интегрального насыщения.
- Он обеспечивает необходимое качество фильтрации при регулировании производной.
- Цифровой регулятор позволяет легко ограничивать величину управляющего сигнала и скорость его изменения.
Основная сложность состоит в подборе необходимых параметров. Если изменеие коэффициентов процесса известно заранее, то применяются таблицы управления коэффициентами процесса. При выполнении регулирования на основе алгоритма приращения вычисляются малыми величинами, для которых достаточно слова. В то же время неточности округления в интегральной части ухудшают качество. Когда происходит переключение режимов работы, величина управляющего воздействия должна вводиться вручную. Общее решение этой проблемы - при каждом переключении имитировать ввод выходного сигнала регулятора, равного текущему выходному значению, установленному вручную.
Алгоритм регулятора PLC выполняется в момент каждой выборки. Программа включает:
- Ввод опорного значения (аналоговый вход)
- Ввод измерения
- Вычисление ошибки управления
- Считывание параметров настройки регулятора.
Общие проблемы:
- Определение интервала выборки
- Ограничение управляющего сигнала
- Интегральное насыщение
- Плавный переход от ручного управления к автоматическому.
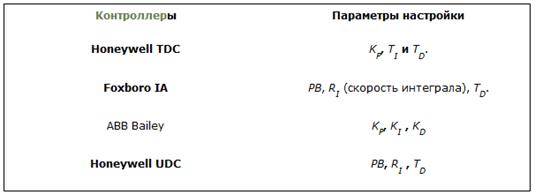
Таблица 2 Таблица параметров настройки
Пропорциональный :
PB = зона пропорциональности (proportional band, % of the PV span);
KC= коэффициент контроллера (controller gain, %/%)
KP = коэффициент пропорциональности контроллера (proportional gain, %/%)
Интегральный:
TI= время сброса (reset time, minutes);
RI= скорость сброса (reset rate, repeats/minute);
KI= коэффициент сброса (reset gain, (%/%)/minute)
Дифференциальный:
TD= время дифференциала (derivative time, minutes);
KD= время дифференциала (derivative time, (%/%)-minutes)
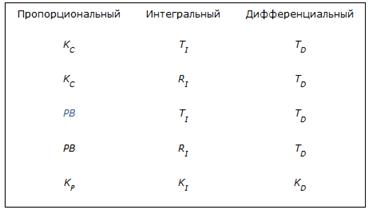
Таблица 3 Таблица соотношений между параметрами настройки

Пропорциональный :
PB = зона пропорциональности (proportional band, % of the PV span);
KC= коэффициент контроллера (controller gain, %/%)
KP = коэффициент пропорциональности контроллера (proportional gain, %/%)
Интегральный:
TI= время сброса (reset time, minutes);
RI= скорость сброса (reset rate, repeats/minute);
KI= коэффициент сброса (reset gain, (%/%)/minute)
Дифференциальный:
TD= время дифференциала (derivative time, minutes);
KD= время дифференциала (derivative time, (%/%)-minutes)
Таблица 3 Таблица соотношений между параметрами настройки

KC = коэффициент контроллера (%/%) и KP = коэффициент пропорциональности контроллера (%/%). На практике это относится к коэффициенту пропорциональности контроллера.
Иногда PB - зона пропорциональности - выражается в инженерных единицах PV.
Важным аспектом является использование для расчета суммарного вклада интегрального члена. Это может привести к явлению, известному как integral windup, вызвающее длительное перерегулирование в контролируемой реакции. Это может быть вызвано плохо настроенным контроллером или выход контроллера слишком ограничен (по некоторым соображениям безопасности или ненадлежащим размером конечного регулирующего элемента), или комбинацией обоих факторов.
Как это происходит? Скажем, управляемый процесс имеет положительный коэффициент усиления и положительное изменение заданной уставки. Контроллер будет пытаться уменьшить погрешность между уставкой и выходом, который изначально положительный. Интегральная компонента будет суммировать эти позитивные ошибки, чтобы создать необходимые интегральное действие. Выброс (overshoot) произойдёт, после чего ошибки становятся отрицательными. Тем не менее, направление сигнала управления не будет меняться, чтобы компенсировать, если сумма ранее положительных ошибок доминирует, в этом случае выброс становится продолжительным.
Направление управляющего воздействия изменится только тогда, когда вклад отрицательный ошибки отменит допонительную накопленную положительную ошибку. Это явление известно как integral windup или reset windup.
Дата добавления: 2015-08-11; просмотров: 1840;