Розрахунок одноконтурних систем регулювання
Одноконтурні АСР призначені для регулювання однієї технологічної величини (вихідної координати) при дії на об'єкт керування різних збурень. Структурну схему одноконтурної системи регулювання показано на рис. 3.1.
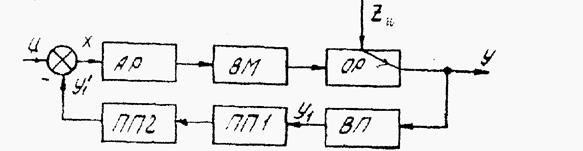
Рис. 3.1. Структурна схема одноконтурної системи регулювання
Одноконтурна АСР має один замкнений контур, який складається з автоматичного регулятора (АР), виконавчого механізму (ВМ), об'єкта регулювання (ОР), вимірювального перетворювача(ВП) - датчика i проміжних перетворювачів ПП1 i ПП2.
Принцип її роботи полягае ось у чому: будь-яке відхилення збурення Z від нормального значення приводить до зміни вихідної координати У. Зміна останньої сприймається первинним ВП, його сигнал У1 після відповідного перетворення у проміжних перетворювачах ПП1 та ПП2 (наприклад, у нормуючому та електропневматичному) надходять на вхід суматора, в якому порівнюються iз заданим значенням и. Оскільки зворотний зв'язок
АСР від'ємний, на виході суматора з'являється сигнал розбіжності Х=и-Y  . Останній надходить на регулятор АР, який виробляє відповідний до закону регулювання сигнал i подає його на вхід ВМ. Цей пристрій змінює положення регулюючого органа, який збільшує або зменшує витрати матеріального чи енергетичного потоку ОП так, щоб вихідна координата набула попереднього значення.
. Останній надходить на регулятор АР, який виробляє відповідний до закону регулювання сигнал i подає його на вхід ВМ. Цей пристрій змінює положення регулюючого органа, який збільшує або зменшує витрати матеріального чи енергетичного потоку ОП так, щоб вихідна координата набула попереднього значення.
У npoцeci дослідження АСР кожну ланку структурної схеми описують тією чи іншою передаточною функцією. При цьому об'єкт керування має дві вхідні координати: X та Z. Канал X ® У називається каналом регулювання, a Z ® У - каналом збурення. У paзi ступінчатої зміни вхідних координат X або Z на виході системи з'явиться сигнал, який змінюватиметься в чaci. Якщо дати збурення по каналу Z ® У, то вихідний сигнал У одержить відхилення від усталеного значення, яке з часом зникне (рис. 3.2, а). 3i зміною завдания и вихідний сигнал також одержить відхилення, яке набуде нового усталеного значення (рис. 3.2, 6).
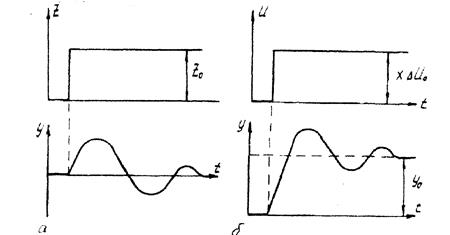
Рис. 3.2. Перехідні процеси АСР у paзi зміни впливів: а - збурюючого; б – задавального
Передаточні функції динамічних ланок позначимо так:
AP®W1(s), BM®W2(s), OP®W3(s), BП®W4(s), ПП1®W5(s), ПП2®W6(s), а передаточну функцію каналу Z ® У позначимо Wz(s). Знайдемо передаточну функцш АСР по каналу регулювання и ® У. Для цього складемо систему рівнянь:
 Y(s) = W1(s) W2(s) W3(s)X(s);
Y(s) = W1(s) W2(s) W3(s)X(s);
Ý  (s) = W4(s) W5(s) W6(s)Y(s); /3.1/
(s) = W4(s) W5(s) W6(s)Y(s); /3.1/
X(s) = u(s) - Ý1(s);
Z(s) = 0,
розв’язавши яку і виключивши проміжний параметр Y  (s), дістанемо передаточну функцію АСР у вигляді:
(s), дістанемо передаточну функцію АСР у вигляді:
Wр(s)=  =
=  . /3.2/
. /3.2/
Якщо об’єкт регулювання має чисте запізнення, то одержану передаточну функцію необхідно помножити на передаточну функцію ланки чистого запізнення W(s) = exp(-τ3 s),
де τ3 – час чистого запізнення.
Система рівнянь для каналу збурення Z → Y має вигляд:
 Y(s) = Wz(s)Z(s);
Y(s) = Wz(s)Z(s);
Y(s) = W1(s) W2(s) W3(s) X(s); /3.3/ Y (s) = X(s);
u(s) = 0,
Розв’язавши систему рівнянь, дістанемо:
W3(s)=  =
=  . /3.4/
. /3.4/
У хімічній технології одноконтурні АСР, як правило, використовують для стабілізації того чи іншого технологічного параметра. Вони розрізняються такими ознаками:
- законом регулювання регулятора;
- виконавчим механізмом (приводом) регулюючого органу;
- динамічними характеристиками об'єкта регулювання;
- кількістю та динамічними характеристиками технічних засобів автоматизації.
Дата добавления: 2015-07-30; просмотров: 1181;