Класифікація систем автоматизації
Автоматичні системи контролю здійснюють контроль різноманітних параметрів і величин, які характеризують роботу технічного агрегату, або протікання якого-небуть процесу. Вони забезпечують автоматичне вимірювання, що передається вимірюючим, реєструючим чи записуючим пристроям.
Автоматичні системи сигналізації призначені для повідомлення обслуговуючого персоналу про стан технічного обладнання чи протікання процесу. Сигналізація здійснюється акустичним або візуальним сигналом.
Автоматичні системи блокування і захисту призначенні для запобігання аварійних ситуацій, тобто без участі людини діють на даний агрегат. Частково чи повністю припиняючи його роботу.
Автоматичні системи пуску і зупинки забезпечують включення і зупинку двигунів і приводів по наперед заданій програмі.
Автоматичні системи сигналізації, контролю, блокування і захисту, пуску і зупинки є розімкнутими.
Вхідними сигналами універсальних показуючих, реєструючих та регулюючих приладів є уніфіковані сигнали зв'язку в ДСП. Тому такі прилади можуть бути застосовані для вимірювання, індикації та реєстрації контрольованих параметрів, сигналізації, стабілізації, програмного регулювання параметрів, значення яких можуть бути перетворені в уніфіковані сигнали, наприклад: 0...5 мА або 20...100 кПа.
До централізованих систем автоматизації відносять спеціально розроблені комплекси апаратури:
а) агрегатовані комплекси засобів контролю та регулювання;
б) мікропроцесорні засоби диспетчеризації, автоматики та телемеханіки;
в) пневматичні агрегатні функціонально-апаратні комплекси та установки.
Ці засоби забезпечують побудову систем неперервного та циклічного контролю та багатоканального регулювання параметрів різних технологічних процесів та окремих агрегатів, інформацію про які доцільно передавати та обробляти в аналоговій формі, а видавати операторові - як в аналоговій, так і в цифровій формі.
Пристрої та системи локальної автоматизації можна детальніше групувати за такими ознаками:
- за рівнем автоматизації - на автоматичні та автоматизовані;
- за ступенем автоматизації - на системи часткової, комплексної та повної автоматизації;
- за призначенням - на системи автоматичного контролю, керування, регулювання,  сигналізації, блокування та захисту;
сигналізації, блокування та захисту;
- за принципом керування - на розімкнуті, замкнуті та комбіновані;
- за характером зміни регульованої величини - на стабілізуючі, слідкуючі, програмні, екстремальні, оптимальні, адаптивні;
- за характером носія енергії - на електричні, пневматичні, гідравлічні та комбіновані;
- за характером сигналів – на аналогові та дискретні (за рівнем - релейні системи, по часу - імпульсні системи, по рівню і часу одночасно – цифрові системи);
- в залежності від мети керування – на стабілізуючі (підтримують вихідні параметри на постійному, заданому значенні) і оптимізуючі (які здатні знаходити оптимальні значення вихідних параметрів в залежності від ситуації в об’єкті).
- за кількістю регульованих величин - на одно- та багатовимірні.
Одновимірними називаються системи, які мають по одній незалежній вихідній величині.
Багатовимірними називаються АСР, які мають дві або більше взаємопов'язаних вихідних величини. До них належать системи непов'язаного та пов'язаного регулювання.

Рис. 2.1. Структурна схема класифікації САК
Частинним випадком керування є автоматичне регулювання, під яким розуміють підтримування вихідних технологічних параметрів об'єкта поблизу заданих значень з метою забезпечення нормального режиму його роботи шляхом подавання керуючих дій.
За принципом регулювання АСР поділяють на такі, що діють за відхиленням, збуренням і комбінованим принципом.
В АСР, які працюють за відхиленням регульованої величини від заданого її значення, збурення Z спричинює відхилення поточного значення регульованої величини y від заданого значення U. Автоматичний регулятор (АР) порівнює значення Y та U і в разі їх розбіжності виробляє регулюючу дію X відповідного знаку, яка через виконавчий пристрій (ВП) подасться на об'єкт регулювання (ОР) і ліквідує цю розбіжність (рис. 2.2).
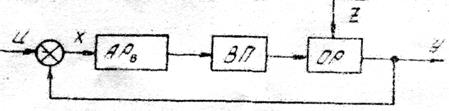
Рис. 2.2. Принципова схема АСР за відхиленням
Системи регулювання за відхиленням замкнені.
При регулюванні за збуренням регулятор АР3 одержує інформацію про поточне значення основного збурюючого фактора Z. Якщо воно не збігається з номінальним значенням U3, регулятор формує регулюючу дію X, що спрямовується на об'єкт (рис. 2.3).

Рис. 2.3. Принципова схема АСР за збуренням
У системах, які працюють за збуренням, сигнал регулювання проходить швидше, ніж у системах, побудованих за принципом відхилення, у результаті чого збурюючу дію можна усунути ще до появи розбіжності.
Комбінований принцип регулювання полягає в одночасному використанні як принципу відхилення, так і принципу збурення. У них вплив основного збурення Z1 нейтралізується регулятором АР3, який працює за принципом збурення, а вплив інших збурень (Z2) - регулятором АРв, який реагує на відхилення поточного значення регульованої величини Y від заданого значення U (рис. 2.4).
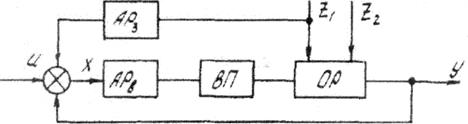
Рис. 2.4. Принципова схема регулювання за комбінованим принципом
Контрольні запитання:
1. Які основні функції автоматизації?
2. За якими ознаками класифікують системи автоматизації?
3. Які бувають системи автоматизації за призначенням?
4. Як поділяють САК в залежності від мети керування?
5. Як поділяють САК в залежності від наявності початкової інформації?
6. Як є принципи побудови систем регулювання?
Дата добавления: 2015-07-30; просмотров: 1770;