Измерительные устройства
Чтобы выработать сигнал ошибки, измерительное устройство должно включать (рис. 12): чувствительный, или воспринимающий, элемент, измеряющий действительное значение регулируемой величины xвых; элемент сравнения, который вырабатывает отклонение (рассогласование)  ; элемент, преобразующий отклонение в сигнал ошибки
; элемент, преобразующий отклонение в сигнал ошибки  (датчик).
(датчик).
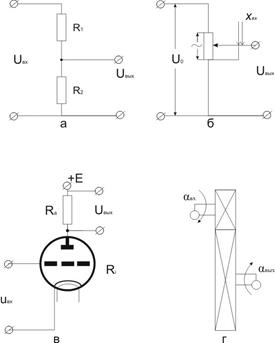
Однако такое разделение измерительного устройства на элементы является условным, так как измерительное устройство в конструктивном отношении часто представляет собой единое целое, в котором трудно выделить отдельные элементы. Примером этого может служить измерительное устройство системы регулирования уровня жидкости (рис. 13, а), в котором заданное значение уровня  устанавливается по шкале потенциометра движком
устанавливается по шкале потенциометра движком  . Действительный уровень
. Действительный уровень  измеряется при помощи поплавка
измеряется при помощи поплавка  , который перемещает движок
, который перемещает движок  потенциометра. Поскольку потенциометр линейный, то напряжение (выходной сигнал измерительного устройства), снимаемое с его движков, пропорционально отклонению
потенциометра. Поскольку потенциометр линейный, то напряжение (выходной сигнал измерительного устройства), снимаемое с его движков, пропорционально отклонению  (измеряемой величине):
(измеряемой величине):
 ,
,
где  — коэффициент передачи измерительного элемента.
— коэффициент передачи измерительного элемента.
Согласно требованиям, предъявляемым к измерителям, выходной сигнал измерительного устройства должен быть пропорциональным измеряемой величине. Кроме того, выходной сигнал должен реагировать на знак измеряемой величины. Оба эти требования отражаются линейной статической характеристикой измерительного устройства (рис. 13, б). Коэффициент определяет наклон этой характеристики (  ) и влияет на точность автоматических систем. Поэтому желательно, чтобы он был как можно большим. Для рассматриваемого измерителя уровня жидкости этот коэффициент можно сделать более высоким, увеличив, например, напряжение питания потенциометра.
) и влияет на точность автоматических систем. Поэтому желательно, чтобы он был как можно большим. Для рассматриваемого измерителя уровня жидкости этот коэффициент можно сделать более высоким, увеличив, например, напряжение питания потенциометра.
Коэффициент должен быть постоянным, а следовательно, статическая характеристика - линейной. Однако измерительные устройства всегда имеют зону нечувствительности, определяемую минимальным значением измеряемой величины, которую еще можно измерить. Так, ширина этой зоны АВ для измерителя уровня жидкости (рис. 13, в) зависит от величины силы трения, необходимой для перемещения движка потенциометра, диаметра провода намотки последнего и люфтов в механической передаче от поплавка к движку . Вполне понятно, что зона нечувствительности влияет на точность измерения, и ее необходимо уменьшать.
Для измерительных устройств очень важно, чтобы выходной сигнал копировал изменения во времени измеряемой величины. Практически же вследствие инерционности измерительного элемента или датчика выходной сигнал отстает от входного. Это отставание характеризует динамические свойства измерительного элемента и должно быть минимальным или вообще отсутствовать. Как оцениваются динамические свойства элементов, мы расскажем в пятой беседе. А сейчас рассмотрим наиболее типовые измерительные элементы и датчики.
 Потенциометрические датчики. Потенциометрический датчик, который преобразует линейные или угловые перемещения в напряжение постоянного или переменного тока, представляет собой проволочный реостат с поступательным либо круговым перемещением движка. В автоматике применяются линейные датчики, т. е. реостаты с равномерной намоткой.
Потенциометрические датчики. Потенциометрический датчик, который преобразует линейные или угловые перемещения в напряжение постоянного или переменного тока, представляет собой проволочный реостат с поступательным либо круговым перемещением движка. В автоматике применяются линейные датчики, т. е. реостаты с равномерной намоткой.
Рассмотрим работу потенциомет-рического датчика. Датчик питается постоянным по величине напряжением  (рис. 14, а). Входной величиной датчика является перемещение
(рис. 14, а). Входной величиной датчика является перемещение  его движка, а выходной - напряжение
его движка, а выходной - напряжение  , снимаемое с потенциометра. Если потенциометр не нагружен (
, снимаемое с потенциометра. Если потенциометр не нагружен (  ), т.е. работает на холостом ходу, то выходное напряжение пропорционально перемещению движка (рис. 14, 6):
), т.е. работает на холостом ходу, то выходное напряжение пропорционально перемещению движка (рис. 14, 6):
 ,
,
Где  - коэффициент передачи (чувствии-тельность) потенциометра, численно рав-ный напряжению, которое снимается с потенциометра при перемещении его движка на единицу длины (угла), в/мм (в/град).
- коэффициент передачи (чувствии-тельность) потенциометра, численно рав-ный напряжению, которое снимается с потенциометра при перемещении его движка на единицу длины (угла), в/мм (в/град).
В реальных условиях датчик работает с нагрузкой  (входное сопротивление подключенного к датчику прибора), по сопротивлению которой протекает ток
(входное сопротивление подключенного к датчику прибора), по сопротивлению которой протекает ток  . Поэтому линейная зависимость между выходным напряжением и перемещением нарушается (рис. 14, 6). Это значит, что коэффициент передачи не является постоянной величиной, и нагрузка оказывает влияние на передачу сигнала.
. Поэтому линейная зависимость между выходным напряжением и перемещением нарушается (рис. 14, 6). Это значит, что коэффициент передачи не является постоянной величиной, и нагрузка оказывает влияние на передачу сигнала.
Влияние нагрузки можно не учитывать, если  , где R - сопротивление датчика. При невыполнении данного условия для уменьшения влияния нагрузки ее развязывают от датчика, включая между датчиком и нагрузкой электронный усилитель, входное сопротивление которого велико. Так часто делают в счетно-решающих устройствах. Правда, схема становится намного сложнее, а устройство - дороже. Но если необходима точность, с этим не приходится считаться. В системах автоматического регулирования сигналы от датчиков подаются на электронные усилители, поэтому вопрос о согласовании нагрузки в этом случае отпадает.
, где R - сопротивление датчика. При невыполнении данного условия для уменьшения влияния нагрузки ее развязывают от датчика, включая между датчиком и нагрузкой электронный усилитель, входное сопротивление которого велико. Так часто делают в счетно-решающих устройствах. Правда, схема становится намного сложнее, а устройство - дороже. Но если необходима точность, с этим не приходится считаться. В системах автоматического регулирования сигналы от датчиков подаются на электронные усилители, поэтому вопрос о согласовании нагрузки в этом случае отпадает.
Если потенциометрический датчик изготовлен из толстого провода, то его статическая характеристика будет ступенчатой (рис. 14, в). Ошибка ступенчатости вызывает колебания выходного напряжения с большой частотой и тем самым создает помехи. Для уменьшения этой ошибки увеличивают число витков, одновременно уменьшая диаметр провода.
Рассмотренный потенциометрический датчик является однотактным, так как знаки входного перемещения и выходного напряжения в нем не меняются. Поэтому он не нашел широкого применения.
В двухтактных датчиках знак выходного напряжения изменяется при изменении знака входного перемещения. В простейшем двухтактном датчике (рис. 15, а) выходное напряжение снимается с участка между движком и средней точкой потенциометра. Недостатком данной схемы является то, что максимальное выходное напряжение равно половине напряжения питания (рис. 15, б), вследствие чего коэффициент передачи потенциометра невелик. Для устранения этого недостатка применяют мостовую схему, состоящую из двух потенциометров (рис. 16, а). Движки потенциометров механически сблокированы таким образом, что перемещаются от нейтрали на величину х, но в противоположные стороны. Входное перемещение х отсчитывается от нейтральной линии, которая делит сопротивление потенциометров пополам. При х = 0 движки находятся на нейтрали. Если потенциометрический датчик питается постоянным током, то при изменении знака х, т. е. при прохождении движков через точку х = 0, полярность выходного напряжения изменяется на обратную. При питании потенциометров переменным током будет изменяться фаза выходного напряжения на 180° по отношению к напряжению питания потенциометра. Максимальное выходное напряжение датчика с двумя потенциометрами равно напряжению питания (рис. 16, б), поэтому коэффициент передачи этого датчика в два раза выше, чем датчика с одним потенциометром.
 Для двухтактных датчиков, как и для однотактных, сопротивление нагрузки должно быть значительно больше сопротивления потенциометра. Причем, коэффициент передачи (чувствительность) двухтактных мостовых датчиков в области малых перемещений (вблизи х = 0) почти не зависит от сопротивления нагрузки, а это очень важно для автоматических систем.
Для двухтактных датчиков, как и для однотактных, сопротивление нагрузки должно быть значительно больше сопротивления потенциометра. Причем, коэффициент передачи (чувствительность) двухтактных мостовых датчиков в области малых перемещений (вблизи х = 0) почти не зависит от сопротивления нагрузки, а это очень важно для автоматических систем.
Достоинством рассмотренных потенциометри-ческих датчиков является простота конструкции, стабильность характеристик, возможность работы как на постоянном, так и на переменном токе. К их недостаткам следует отнести недостаточную надежность из-за наличия скользящих контактов. Потенциометр и чес кие датчики часто применяют в качестве выходных частей элементов для измерения уровней жидкостей, давления, в гироско пических приборах и т. д. В частности, рассмотрим работу измерителя угла рассогласования на потенциометрических датчиках, который применяют в приборных маломощных следящих системах.
 Измеритель состоит из двух одинаковых потенциометров - задающего
Измеритель состоит из двух одинаковых потенциометров - задающего  и отрабатывающего
и отрабатывающего  , соединенных по мостовой схеме (рис.17, а). Движку потенциометра задается требуемое значение угла поворота
, соединенных по мостовой схеме (рис.17, а). Движку потенциометра задается требуемое значение угла поворота  , а движок потенциометра связан с объектом регулирования. Входной величиной схемы является угол рассогласования
, а движок потенциометра связан с объектом регулирования. Входной величиной схемы является угол рассогласования  , а выходной — напряжение
, а выходной — напряжение  (рис. 17, б). В режиме слежения угол рассогласования
(рис. 17, б). В режиме слежения угол рассогласования  невелик, поэтому имеет место пропорциональная зависимость
невелик, поэтому имеет место пропорциональная зависимость
 ,
,
где - коэффициент передачи, который можно считать постоянной величиной.
Данная схема, по существу, является двухтактным потенциометрическим датчиком, который мы уже ранее рассмотрели. Ее недостатком является ограниченность угла поворота щеток потенциометров (менее 360°). Однако этот недостаток можно устранить, применив специальные схемы включения потенциометров.
Измеритель угла рассогласования на сельсинах. Чтобы передать на расстояние некоторую угловую величину или обеспечить синхронное вращение нескольких механически не связанных осей, которые несут незначительную нагрузку (вращение шкал или индексов-стрелок), применяют сельсинную систему, работающую в индикаторном режиме (рис. 18, а). Однако для нас важно другое применение сельсинной системы — в качестве измерителя рассогласования в следящих системах. В этом случае сельсинная система работает в трансформаторном режиме (рис. 18, б).
Основными элементами сельсинных систем являются: сельсин-датчик СД, сельсин-приемник СП (для индикаторного режима), сельсин-трансформатор СТ (для трансформаторного режима) и линия синхронной связи между сельсинами. К одному СД можно подключать несколько СП.
Сельсин представляет собой малогабаритную электрическую индукционную машину переменного тока. Сельсины бывают контактные и бесконтактные. Рассмотрим контактный сельсин с двумя обмотками: однофазной и трехлучевой, одна из которых расположена на статоре, другая - на роторе. Причем, расположение обмоток на принцип действия сельсина не влияет.
Пусть у сельсин-датчика на статоре расположена однофазная, а на роторе - трехлучевая обмотки (рис. 19, а). Однофазная обмотка питается переменным током промышленной (50 гц) или повышенной (400 - 500 гц) частоты и создает пульсирующий магнитный поток возбуждения Фв. Этот поток пронизывает обмотки ротора и наводит в них э.д.с, амплитуда и фаза которых зависит от угла между осью обмотки возбуждения и осью соответствующей обмотки ротора. Так, в обмотке 1 наводится максимальная э.д.с.  , так как ее ось совпадает с осью обмотки возбуждения. В обмотках 2 и 3 э.д.с. равны
, так как ее ось совпадает с осью обмотки возбуждения. В обмотках 2 и 3 э.д.с. равны  и по отношению к
и по отношению к  находятся в противофазе. При вращении ротора амплитуды и фазы э.д.с. роторных обмоток изменяются.
находятся в противофазе. При вращении ротора амплитуды и фазы э.д.с. роторных обмоток изменяются.
 При индикаторном режиме сельсины соединяют по схеме, приведенной на рис.20. Рассмотрим работу этой схемы. В обмотках роторов СП и СД наводятся э.д.с. Если сельсины согласованы (
При индикаторном режиме сельсины соединяют по схеме, приведенной на рис.20. Рассмотрим работу этой схемы. В обмотках роторов СП и СД наводятся э.д.с. Если сельсины согласованы (  ), то э.д.с. обмоток ротора СП равны соответствующим э.д.с. обмоток ротора СД, и в роторной цепи ток отсутствует. Если сельсины рассогласованы (
), то э.д.с. обмоток ротора СП равны соответствующим э.д.с. обмоток ротора СД, и в роторной цепи ток отсутствует. Если сельсины рассогласованы (  ), то соответствующие э.д.с. роторных обмоток не будут равны друг другу, и по цепи роторных обмоток потекут уравнительные токи
), то соответствующие э.д.с. роторных обмоток не будут равны друг другу, и по цепи роторных обмоток потекут уравнительные токи  ,
,  и
и  , которые создадут магнитные потоки в роторах СД и СП. Эти потоки будут взаимодействовать с потоками возбуждения, в результате чего появятся вращающие моменты, стремящиеся повернуть роторы СД и СП в согласованное положение. Однако ротор СД соединен с задающим устройством необратимой механической передачей и развернуться не может. Поэтому в согласованное положение поворачивается ротор СП. Следовательно, при непрерывном вращении ротора СД синхронно с ним будет вращаться и ротор СП.
, которые создадут магнитные потоки в роторах СД и СП. Эти потоки будут взаимодействовать с потоками возбуждения, в результате чего появятся вращающие моменты, стремящиеся повернуть роторы СД и СП в согласованное положение. Однако ротор СД соединен с задающим устройством необратимой механической передачей и развернуться не может. Поэтому в согласованное положение поворачивается ротор СП. Следовательно, при непрерывном вращении ротора СД синхронно с ним будет вращаться и ротор СП.
 Для повышения точности рассмотренной системы осуществляют двух-канальную передачу: по точному и грубому отсчетам, подобно тому, как в часах применяют часовую и минутную стрелки.
Для повышения точности рассмотренной системы осуществляют двух-канальную передачу: по точному и грубому отсчетам, подобно тому, как в часах применяют часовую и минутную стрелки.
Схема трансформаторной сельсинной системы приведена на рис.21, а. В отличие от индикаторного в трансформа-торном режиме однофазная обмотка СТ не питается, с нее снимается выходное напряжение схемы. Кроме того, ротор СТ механически связан с выходным валом следящей системы. Под действием э.д.с. роторных обмоток СД в роторных цепях сельсинов проходят токи. Эти токи создают в роторе СТ суммарный магнит-ный поток, который пронизывает однофазную обмотку СТ и наводит в ней э.д.с.  . Если система согласована ( ), то
. Если система согласована ( ), то  максимально. Однако для измерителя угла рассогласования необходимо, чтобы в согласованном положении напряжение равнялось нулю. Для этого статор СД разворачивают на 90° по отношению к статору СП (рис. 21, а). Тогда в согласованном положении = 0. Если система рассогласована ( ), то
максимально. Однако для измерителя угла рассогласования необходимо, чтобы в согласованном положении напряжение равнялось нулю. Для этого статор СД разворачивают на 90° по отношению к статору СП (рис. 21, а). Тогда в согласованном положении = 0. Если система рассогласована ( ), то
 ,
,
Где  - значение амплитуды выходного напряжения.
- значение амплитуды выходного напряжения.
Данная зависимость отражает статическую характеристику измерителя угла рассогласования на сельсинах, которая, как видно из рис. 21,б, нелинейна, т.е. нет пропорциональной зависимости между и . Это, на первый взгляд, противоречит требованиям, предъявляемым к измеритель-ным устройствам. Однако в режиме слежения следящая система работает при малых рассогласованиях (на рис. 21, б - заштрихованная область), поэтому в рабочей области нелинейную характеристику можно смело заменить линейной:
 ,
,
где  - коэффициент передачи сельсинного измерителя угла рассогласования.
- коэффициент передачи сельсинного измерителя угла рассогласования.
Статическая характеристика измерителя угла рассогласования показывает, как изменяется амплитуда и фаза выходного напряжения по отношению к фазе опорного напряжения (напряжения возбуждения  ). При изменении знака рассогласования Да выходное напряжение по отношению к опорному изменяет фазу на 180° (рис. 21, в). Это в итоге приводит к изменению направления вращения исполнительного электродвигателя следящей системы в сторону ликвидации рассогласования.
). При изменении знака рассогласования Да выходное напряжение по отношению к опорному изменяет фазу на 180° (рис. 21, в). Это в итоге приводит к изменению направления вращения исполнительного электродвигателя следящей системы в сторону ликвидации рассогласования.
Для повышения точности измерителя угла рассогласования применяют двухканальную систему. Кроме того, вместо сельсинов используют вращающиеся трансформаторы.
 Электрические двигатели постоянного тока. Не останавливаясь на принципе действия, рассмотрим способы управления и особенности электродвигателя постоянного тока с независимым возбуждением как исполнительного устройства. Управлять электродвигателем можно как со стороны якоря, так и со стороны обмотки возбуждения.
Электрические двигатели постоянного тока. Не останавливаясь на принципе действия, рассмотрим способы управления и особенности электродвигателя постоянного тока с независимым возбуждением как исполнительного устройства. Управлять электродвигателем можно как со стороны якоря, так и со стороны обмотки возбуждения.
При управлении электродвигателем со стороны якоря (рис. 39, а) обмотка возбуждения питается неизменным напряжением постоянного тока и создает поток возбуждения. На якорь от усилителя мощности подается управляющее напряжение также постоянного тока  (для электродвигателей средней и большой мощности усилителем является ЭМУ). Выходной вал электродвигателя обычно связан через понижающий редуктор Р с объектом управления ОУ (нагрузкой). Скорость вращения
(для электродвигателей средней и большой мощности усилителем является ЭМУ). Выходной вал электродвигателя обычно связан через понижающий редуктор Р с объектом управления ОУ (нагрузкой). Скорость вращения  электродвигателя пропорциональна величине , причем ее направление изменяется на обратное при перемене полярности . Существенным достоинством якорного управления является большой диапазон изменения скорости вращения электродвигателя. Недостатком якорного управления является то, что усилитель должен иметь значительную мощность, поскольку по якорной цепи поступает основная часть энергии, необходимой для работы электродвигателя.
электродвигателя пропорциональна величине , причем ее направление изменяется на обратное при перемене полярности . Существенным достоинством якорного управления является большой диапазон изменения скорости вращения электродвигателя. Недостатком якорного управления является то, что усилитель должен иметь значительную мощность, поскольку по якорной цепи поступает основная часть энергии, необходимой для работы электродвигателя.
Динамические свойства электродвигателя зависят от инерционности электромагнитных процессов, определяемых индуктивностью якоря и инерционностью механических процессов. Если индуктивность якоря невелика (в маломощных двигателях), то учитывают только инерционность механических процессов, которая зависит от момента инерции якоря. Кроме того, поскольку электродвигатель всегда связан с нагрузкой, то необходимо также учитывать и ее момент инерции. Это достигается приведением момента инерции нагрузки к валу электродвигателя. Для уменьшения инерционности уменьшают диаметр якоря, соответственно увеличивая его в длину.
Инерционность электродвигателя проявляется в том, что при внезапной подаче управляющего напряжения его скорость достигает своего установившегося значения не сразу, а постепенно (рис.39,в). Так, если постоянная времени электродвигателя Т = 0,3 сек, то скорость достигнет своего установившегося значения  примерно через 1 сек, ибо длительность апериодического переходного процесса равна (3÷4) Т.
примерно через 1 сек, ибо длительность апериодического переходного процесса равна (3÷4) Т.
При управлении электродвигателем со стороны обмотки возбуждения (полюсное управление) якорь питается от сети неизменным напряжением и постоянного тока (рис. 39, б). Величину тока якоря  необходимо поддерживать постоянной. Для этого в цепь якоря включается добавочное сопротивление R. Управление электродвигателем осуществляется напряжением иу от усилителя мощности. Так как основная энергия для работы электродвигателя поступает из сети (в цепь якоря), то по сравнению с якорным полюсное управление требует усилителя меньшей мощности. Следовательно, полюсное управление осуществить проще, чем якорное. При полюсном управлении скорость электродвигателя изменится в небольших пределах: отношение максимальной скорости к минимальной составляет не более 3-4. Кроме того, возникают трудности, связанные с нелинейным характером статических характеристик электродвигателя. Полюсное управление применяют для маломощных электродвигателей.
необходимо поддерживать постоянной. Для этого в цепь якоря включается добавочное сопротивление R. Управление электродвигателем осуществляется напряжением иу от усилителя мощности. Так как основная энергия для работы электродвигателя поступает из сети (в цепь якоря), то по сравнению с якорным полюсное управление требует усилителя меньшей мощности. Следовательно, полюсное управление осуществить проще, чем якорное. При полюсном управлении скорость электродвигателя изменится в небольших пределах: отношение максимальной скорости к минимальной составляет не более 3-4. Кроме того, возникают трудности, связанные с нелинейным характером статических характеристик электродвигателя. Полюсное управление применяют для маломощных электродвигателей.
Очевидно, что можно осуществить и комбинированное управление, т. е. одновременно управлять электродвигателем как со стороны якоря, так и со стороны обмотки возбуждения.
 Двухфазные асинхронные электродвигатели. Электродвигатели переменного тока, особенно с короткозамкнутым ротором, значительно проще по устройству и удобнее в эксплуатации, чем электродвигатели постоянного тока. Самым распространенным является трехфазный асинхронный короткозамкнутый электродвигатель перемен-ного тока. Наряду со многими достоинствами у этого электродвигателя имеется существенный недостаток: очень трудно регулировать скорость вращения, что резко снижает область его применения в автоматике.
Двухфазные асинхронные электродвигатели. Электродвигатели переменного тока, особенно с короткозамкнутым ротором, значительно проще по устройству и удобнее в эксплуатации, чем электродвигатели постоянного тока. Самым распространенным является трехфазный асинхронный короткозамкнутый электродвигатель перемен-ного тока. Наряду со многими достоинствами у этого электродвигателя имеется существенный недостаток: очень трудно регулировать скорость вращения, что резко снижает область его применения в автоматике.
В автоматических системах широко применяют двухфазные асинхронные электродвигатели с короткозамкнутым ротором. Мощность этих электродвигателей невелика и составляет единицы-десятки ватт. Поэтому их применяют в качестве исполнительных двигателей, например в маломощных следящих системах, интегрирующих проводах и т. п.
Двухфазные асинхронные двигатели имеют на статоре обмотку управления ОУ и обмотку возбуждения ОВ, магнитные оси которых сдвинуты в пространстве на 90° (рис. 40, а). Эти обмотки создают вращающееся магнитное поле статора, и оно увлекает за собой ротор электродвигателя, скорость которого всегда меньше скорости поля. Для создания вращающегося магнитного поля ' статора необходимо, чтобы обе обмотки питались переменными токами, сдвинутыми по фазе на 90°. Если обе обмотки питаются от одной сети, то одну из обмоток (обычно обмотку возбуждения) включают через конденсатор С.
Исполнительные электродвигатели должны иметь жесткую и линейную механическую характеристику. Такова, например, характеристика электродвигателя постоянного тока (рис. 40, б, кривая 1). При жесткой характеристике развиваемый электродвигателем момент незначительно изменяется с изменением скорости его вращения. Однако механическая характеристика двухфазного асинхронного электродвигателя не является линейной (рис. 40, б, кривая 2). Для того чтобы она была близка к линейной (рис. 40, б, кривая 3), ротор электродвигателя должен иметь большое активное сопротивление. Это достигают тем, что обмотку ротора изготовляют из большого числа витков тонкого провода. Особенно большое распространение получили электродвигатели, у которых ротор вообще не имеет обмотки, а выполнен в виде тонкостенного стакана из немагнитного или ферромагнитного материала. Полый ротор имеет небольшой момент инерции, и двигатели с таким ротором менее инерционны, что весьма существенно.
Скорость вращения электродвигателя при неизменном напряжении на обмотке возбуждения можно регулировать изменением амплитуды или фазы управляющего напряжения. Наиболее часто применяют амплитудное управление. Реверс электродвигателя осуществляют, изменяя фазу управляющего напряжения на 180°.
В автоматических системах управление двухфазным асинхронным электродвигателем осуществляют при помощи усилителя мощности с выходом на переменном токе (рис. 40, а). Обмотки возбуждения и усилитель обязательно Должны питаться от одной сети, например от одинаковых фаз трехфазной личин. Необходимый сдвиг фаз в 90° между токами в обмотках возбуждения и управления статора электродвигателя можно осуществить в усилителе. Тогда необходимость в конденсаторе С отпадает.
Существенными достоинствами двухфазных асинхронных электродвигателей являются: отсутствие щеток и коллектора, малая инерционность, возможность питания от устойчивых в работе усилителей переменного тока.
ПЯТАЯТИПОВЫЕ ЗВЕНЬЯ
ВЕСЕДААВТОМАТИЧЕСКИХ СИСТЕМ
Что такое типовое звено?— Пропорциональное (усилительное) звено.— Апериодическое звено.— Колебательное звено.— Интегрирующее звено.— Апериодическое звено как интегратор.— Дифференцирующее звено.— Идеальные и реальные звенья.— Запаздывающее звено.— Какому звену соответствует данный элемент автоматической системы?— Сравнительная оценка типовых звеньев.— Устойчивые и неустойчивые звенья.
1. КЛАССИФИКАЦИЯ ТИПОВЫХ ЗВЕНЬЕВ
Во второй беседе элементы автоматических систем мы классифицировали по функциональным признакам, т.е. по назначению. Такое подразделение элементов удобно, например, при изучении устройства и взаимодействия их в АС. Однако подобная классификация не всегда целесообразна. Более удобно элементы классифицировать по их динамическим свойствам, поскольку одной из важнейших задач теории автоматического управления является изучение динамических процессов в АС. В этом случае удобен принцип классификации элементов по звеньям, являющимся своеобразными «кирпичами», из которых строится «здание» динамики автоматических систем.
Динамическим звеном, или просто звеном, называется элемент (часть) автоматической системы, который имеет определенные динамические свойства. Рассмотрим в качестве примера электрическую цепь и механическую систему.
Электрическая цепь (рис. 65, а) состоит из сопротивления R, емкости С и индуктивности L. При наличии внешнего напряжения и динамические процессы в электрической цепи описываются дифференциальным уравнением второго порядка
|
 ,
,
где q – заряд емкости С.
Механическая система (рис. 65, б) состоит из твердого тела М, пружины П и демпфера Д. При наличии внешней силы f дифференциальное уравнение динамики механической системы имеет вид
|
 ,
,
где х - перемещение тела М; m - масса тела М;  - коэффициент силы демпфера Д; с — коэффициент жесткости пружины /7.
- коэффициент силы демпфера Д; с — коэффициент жесткости пружины /7.
Таким образом, уравнения динамики электрической цепи и механической системы являются однотипными. Из этого можно сделать вывод, что динамические процессы в обеих системах, несмотря на различную их физическую природу, являются сходственными. Другими словами, электрическая цепь и механическая система являются звеньями одного типа.
 В этом единстве динамических свойств различных по физической природе элементов находит свое подтверждение известное высказывание В.И.Ленина:
В этом единстве динамических свойств различных по физической природе элементов находит свое подтверждение известное высказывание В.И.Ленина:
«Единство природы обнаруживается в «поразительной аналогичности» дифференциальных уравнений, относящихся к разным областям явлений» *.
Оказывается, что, несмотря на большое разнообразие элементов, которые отличаются между собой по физической природе, конструктивному оформлению, мощности, виду потребляемой энергии и т. д., можно выделить всего несколько типовых звеньев.
За типовые звенья, по-видимому, целесообразно принять такие, которые могут служить основой для построения любых других звеньев, встречающихся на практике. Обычно за основу принимают звено, обладающее одной степенью свободы. Математические процессы в таком звене описываются дифференциальным уравнением второго порядка
|
 ,
,
где  и
и  - соответственно входная и выходная величины;
- соответственно входная и выходная величины;  и
и  - постоянные коэффициенты.
- постоянные коэффициенты.
Если принять это уравнение за исходное, то легко вывести уравнения различных типовых звеньев.
Типовые звенья являются звеньями направленного действия: сигналы передаются звеном в одном направлении - со входа на выход. При изменении входного сигнала изменяется и выходной; если входной сигнал не меняется, не должен изменяться и выходной сигнал. Для того чтобы элемент АС отображался звеном направленного действия, необходимо учитывать нагрузку на его выходе. Так, например, во второй беседе при знакомстве с потенциометрическим датчиком мы видели, что его коэффициент передачи при холостом ходе и с нагрузкой имеет различные значения. Чтобы этот датчик можно было рассматривать как звено направленного действия, необходимо принять его коэффициент передачи с учетом нагрузки.
При соединении звеньев направленного действия они сохраняют свои прежние свойства.
Типовые звенья подразделяют на пропорциональные (усилительные), апериодические (инерционные), колебательные, интегрирующие, дифференцирующие и форсирующие. Несколько обособленно в этой классификации стоит запаздывающее звено, но об этом мы поговорим позднее. Основные характеристики типовых звеньев приведены в табл. 1.
Теперь познакомимся с каждым типовым звеном в отдельности.

 В. И. Ленин. Соч., изд. 4, т. 14, стр. 276.
В. И. Ленин. Соч., изд. 4, т. 14, стр. 276.
|
Дата добавления: 2015-07-14; просмотров: 2067;