ПРИНЦИПЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Одна из основных задач построения автоматических систем состоит в том, чтобы решить, каким образом при помощи простейших технических средств получить и передать тот объем информации, который необходим для достижения цели управления.
Несмотря на существенное разнообразие технических процессов, построение аппаратуры управления и автоматических систем основывается на ряде общих принципов управления, основные из которых следующие: принцип управления по отклонению, принцип управления по возмущению, принцип комбинированного управления и принцип адаптации.
Принцип автоматического управления определяет, как и на основе какой информации формировать управляющее воздействие в системе. Одним из основных признаков, характеризующих принцип управления, является требуемая для выработки управляющего воздействия рабочая информация, а следовательно, и конфигурация цепей передачи воздействий в системе. Выбор принципа построения автоматической системы зависит от ее назначения, характера изменения задающего и возмущающих воздействий, возможностей получения необходимой рабочей информации, стабильности параметров управляемого объекта и элементов управляющего устройства и т. п.
Принцип управления по отклонению.Если в автоматической системе управляющее воздействие вырабатывается на основе информации об отклонении управляемой величины от требуемого значения, то говорят, что система построена на основе принципа управления по отклонению, или принципа обратной связи. Для реализации этого принципа в управляющем устройстве необходимо осуществлять сравнение действительного значения управляемой величины с требуемым (предписанным) значением и управлять объектом в зависимости от результатов этого сравнения.
Первыми промышленными автоматическими системами, в которых был реализован принцип управления по отклонению, явились автоматический регулятор уровня воды в котле паровой машины, изобретенный И. И. Ползуновым в 1765 г., и центробежный регулятор скорости вращения вала паровой машины Уатта (1784 г.).
Применяя принцип управления по отклонению, можно построить автоматические и полуавтоматические системы с обратной связью, или системы с замкнутыми цепями воздействия. На рис. 3 изображена блок-схема автоматической системы с обратной связью. Управляющее воздействие и в этой системе вырабатывается в зависимости от значений функции отклонения — функции разности ∆х (t) между требуемым хвх(t) и действительным хвых (t) значениями управляемой величины:
и = F (∆х).
Связь между отклонением и управляющим воздействием устанавливается некоторым оператором W1, характеризующим свойства управляющего устройства. Динамические свойства управляемого объекта можно описать оператором W2, устанавливающим связь между управляемой величиной и управляющим воздействием.
Таким образом, характерной чертой автоматических систем, построенных на основе принципа управления по отклонению, является наличие обратной связи.
Обратная связь — это такая связь, при которой информация о состоянии управляемого объекта (контрольное воздействие, соответствующее действительному значению управляемой величины) передается с выхода системы на вход управляющего устройства. Обратную связь называют отрицательной, если в управляющем устройстве с помощью элемента сравнения (сумматора) определяется отклонение ∆х (t) = хвх(t) — хвых (t) (рис. 3).
| В автоматической системе с обратной связью можно осуществлять различные законы изменения управляемой (регулируемой) величины: стабилизацию, программное изменение, слежение. В частности, замкнутые системы, применяемые в вычислительных устройствах, решают задачи копирования, умножения, деления, дифференцирования, интегрирования, воспроизведения сложных функций и т. п. | 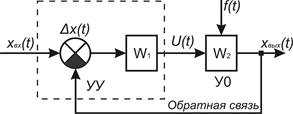
|
| Рис. 3. Блок-схема автоматической системы с обратною связью. |
Принцип управления по отклонению является универсальным и эффективным, поскольку он позволяет управлять неустойчивыми объектами, а также осуществлять требуемый закон изменения управляемой величины с допустимо малым отклонением (ошибкой) ∆х независимо от того, какими причинами последнее вызвано. Так, например, влияние возмущающего воздействия f (t) в системе (рис. 3) можно значительно ослабить без непосредственного его измерения благодаря свойствам обратной связи.
Принцип обратной связи характерен не только для технических систем, но и для живых организмов, в частности для человека. Сила звука нашего голоса, скорость и частота протекания нервных импульсов в коре головного мозга, химический обмен веществ внутри тела и пространственное положение его частей, все без исключения мельчайшие и сложнейшие движения происходят по принципу обратной связи.
В качестве примера рассмотрим систему стабилизации напряжения генератора постоянного тока (рис. 4), построенную на основе принципа регулирования по отклонению. Управляемым объектом (УО) в этой системе является генератор с переменной нагрузкой Rн. Управляющее устройство (регулятор) состоит из батареи — источника эталонного напряжения u0, электронного усилителя и цепи обратной связи, по которой действительное значение напряжения генератора игс зажимов последнего подается на вход усилителя для сравнения с напряжением u0.
Напряжение генератора игсвязано с током нагрузки Iн и э. д. с. генератора Е зависимостью
| (1) |
иг= Е — Iн Rя,
где Rя — сопротивление цепи якоря генератора.
Пренебрегая реакцией якоря и влиянием насыщения магнитной цепи, r первом приближении можно принять
| (2) |
E = k1 Iв,
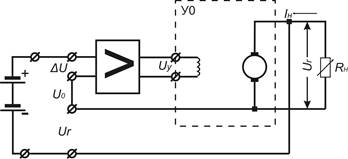
| где Iв — ток возбуждения; k1— коэффициент пропорциональности. Из формул (1) и (2) видно, что если бы в рассматриваемой системе отсутствовало управляющее устройство, то напряжение генератора иг изменялось бы под воздействием целого ряда внешних и внутренних факторов: изменения тока нагрузки Iн при изменении сопротивления Rн, колебания тока возбуждения Iв и изменения сопротивления цепи якоря Rя |
| Рис. 4. Схема системы стабилизации напряжения генератора постоянного тока. | вследствие изменения температуры. Управляющee устройство поддерживает величину напряжения генератора иг постоянной и равной с точностью до ∆u напряжению и0 независимо от действия внешних и внутренних возмущений. |
Процессы в отдельных элементах рассматриваемой системы без учета инерционностей можно описать следующими приближенными уравнениями:
уравнением замыкания системы
∆u = u0 — иг;
уравнением электронного усилителя с коэффициентом усиления ky
иу = ky∆u;
уравнением цепи обмотки возбуждения (ОВ) генератора с сопротивлением Rв
 ,
,
где  ;
;
уравнениями управляемого объекта
 ;
; 
Исключив промежуточные переменные из приведенных выше уравнений, установим связь между рассогласованием (ошибкой стабилизации) ∆u, требуемым значением регулируемой величины u0 и падением напряжения IнRя:
| (3) |

откуда
| (4) |
 ,
,
где k =k1k2ky— общий коэффициент усиления разомкнутой системы.
При достаточно большом k установившуюся ошибку ∆u можно сделать сколь угодно малой. Однако при помощи схемы, приведенной на рис. 5, рассогласование ∆u свести к нулю нельзя, так как при этом напряжение на обмотке возбуждения также было бы равным нулю. Автоматические системы, у которых при u0 = const в установившемся режиме ∆u ≠ 0, называются статическими системами.
| жестко связанного через понижающий редуктор (Р) с управляемым объектом (УО). Управляемый объект не входит в замкнутый контур следящей системы и по существу является нагрузкой для исполнительного двигателя. Рассматриваемая следящая система представляет собой систему регулирования угла поворота исполнительного двигателя, а следовательно, и отрабатывающей оси αвых (t) в соответствии с положением задающей оси αвх (t), т. е. отрабатывающая ось «следит» за положением задающей оси. |
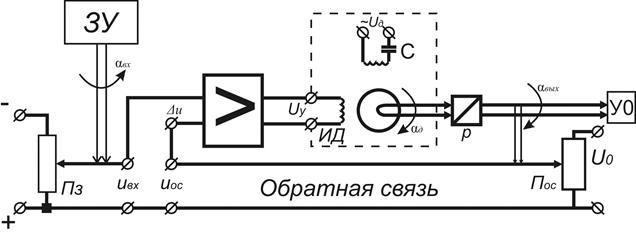
В качестве второго примера рассмотрим следящую систему (рис. 6), которая состоит из следующих блоков: задающего устройства (ЗУ), вал которого (задающая ось) вращается по любому требуемому закону αвх (t); задающего линейного потенциометра П3, преобразующего угол поворота αвх в пропорциональное напряжение ивх; линейного потенциометра обратной связи, По.с., преобразующего угол поворота отрабатывающей оси αвх в пропорциональное напряжение uо.с; усилителя; исполнительного двигателя (ИД),
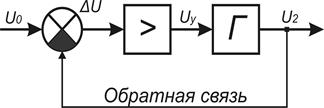
| Рис. 5. Структурная схема системы стабилизации напряжения генератора. |
|
| Рис. 6. Упрощенная принципиальная схема следящей системы. |
Если щетки потенциометров П3 и По.с. согласованы (uо.с = ивх), то напряжение рассогласования А.и равно нулю, и исполнительный двигатель неподвижен. Если задающий вал повернуть относительно согласованного положения на какой-либо угол, то на входе усилителя появится напряжение ∆u, пропорциональное углу рассогласования ∆α = αвх — αвых. Усиленный и преобразованный сигнал иу поступает на управляющую обмотку двухфазного асинхронного электродвигателя, обмотка возбуждения которого питается опорным напряжением uв. Ротор электродвигателя будет вращаться в определенном направлении до тех пор, пока щетка потенциометра По.сне займет согласованного со щеткой потенциометра П3 положения. Напряжение рассогласования станет равным нулю, и система будет находиться в новом состоянии равновесия, определяемом положением задающего вала.
Исполнительный двигатель обеспечивает интегральное управление объектом, так как угловая скорость вращения его ротора пропорциональна рассогласованию ∆и. При αвх = const после окончания переходного процесса в системе рассогласование равно нулю (∆α = 0). Поэтому рассматриваемая следящая система называется астатической системой первого порядка по отношению к задающему воздействию. Установившаяся ошибка ∆αуст в этой системе появляется при равномерном вращении задающего вала с постоянной скоростью.
Принцип управления по возмущению.Принцип управления по возмущению, или принцип компенсации возмущений, состоит в том, что управляющее воздействие в системе вырабатывается в зависимости от результатов измерения возмущения, действующего на объект. Системы, построенные по этому принципу, работают по разомкнутой цепи, т. е. не имеют обратной связи. Системы с разомкнутой цепью воздействий разделяют на две группы: системы компенсации и системы программного управления.
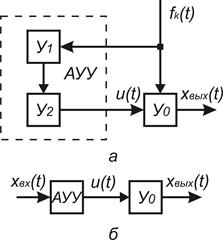
В системе компенсации (рис. 7, а) на управляемый объект (УО) воздействует координатное возмущение fK (t), изменяющее регулируемую величину xвых(t)- Это возмущение измеряется специальным устройством У1. Полученный сигнал усиливается и преобразуется, если это необходимо, в другой части автоматического управляющего устройства (АУУ) — У2. Следовательно, управляющее воздействие является функцией возмущающего воздействия:

| Величина и знак управляющего воздействия должны быть такими, чтобы полностью или в значительной степени компенсировать влияние возмущающего воздействия на объект.
Таким образом, автоматическими системами с разомкнутой цепью воздействий называются системы, в которых управляющее воздействие вырабатывается в функции задающего или возмущающего воздействия, а в общем случае — в функции обоих воздействий одновременно:
 .
В настоящее время принцип управления по возмущению широко применяется, потому что он позволяет уменьшить погрешности автоматических систем, вызываемые как задающими, так и возмущающими воздействиями. Его основное достоинство — высокое быстродействие цепей компенсации, так как система реагирует непосредственно на причину, а не на следствие. Однако этот принцип имеет недостатки. Основной из них — избирательность: не всегда возможно измерить и учесть все возмущения. Обычно учитывается действие лишь одного или нескольких наиболее существенных возмущений, которые измеряются управляющим устройством.
Системы программного управления (рис. 7, б) также распространены в технике. К ним относятся, например, станки с программным управлением. В этих системах программа хранится в запоминающих устройствах и в цифровом виде поступает на исполнительные устройства, обеспечивая определенный закон изменения управляемой величины. .
В настоящее время принцип управления по возмущению широко применяется, потому что он позволяет уменьшить погрешности автоматических систем, вызываемые как задающими, так и возмущающими воздействиями. Его основное достоинство — высокое быстродействие цепей компенсации, так как система реагирует непосредственно на причину, а не на следствие. Однако этот принцип имеет недостатки. Основной из них — избирательность: не всегда возможно измерить и учесть все возмущения. Обычно учитывается действие лишь одного или нескольких наиболее существенных возмущений, которые измеряются управляющим устройством.
Системы программного управления (рис. 7, б) также распространены в технике. К ним относятся, например, станки с программным управлением. В этих системах программа хранится в запоминающих устройствах и в цифровом виде поступает на исполнительные устройства, обеспечивая определенный закон изменения управляемой величины.
|
Следовательно, разомкнутыми системами программного управления называются такие системы, в которых управляющее воздействие вырабатывается в функции задающего воздействия (программы). При этом в большинстве случаев возникает необходимость в применении принципа компенсации возмущений.
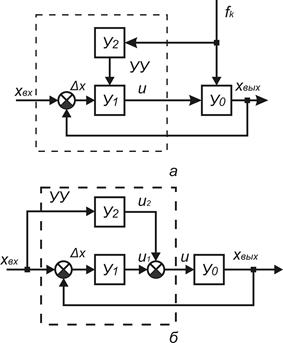
Принцип комбинированного управления.Современные автоматические системы высокой точности обычно строят на основе принципа комбинированного управления, сочетающего в себе принципы управления по отклонению и по возмущению. При этом в автоматических системах комбинированного управления наряду с замкнутыми контурами, образуемыми отрицательными обратными связями, имеются цепи компенсации основного возмущающего воздействия fк (рис. 8, а) или дополнительная цепь компенсации ошибок от задающего воздействия хвх (рис. 8, б). В первом случае управляющее воздействие u = F(Ах, /„), а во втором — и = F (∆x, fк). Действие неучтенных возмущений в комбинированных системах компенсируется или ослабляется контуром управления по отклонению.
На рис. 9 приведена упрощенная принципиальная схема следящей системы, которая построена по принципу комбинированного управления. В этой системе сельсинная схема, состоящая из сельсин-датчика (СД) и сельсин-трансформатора (СТ), является измерительным устройством. Сигнальное напряжение uc на выходе сельсин-трансформатора при малых рассогласованиях между задающей αвх и отрабатывающей αвых осями определяется по формуле
 ,
где kc — коэффициент передачи сельсин-трансформатора. ,
где kc — коэффициент передачи сельсин-трансформатора.
| 
|
| Рис. 9. Упрощенная принципиальная схема комбинированной следящей системы. |
Напряжение uc усиливается и преобразуется в усилителе и подается на исполнительный двигатель (ИД), вал которого через редуктор (Р) приводит во вращательное движение управляемый объект (УО) и ротор сельсин-трансформатора. Направление вращения двигателя зависит от знака рассогласования и соответствует уменьшению угла рассогласования. Таким образом, основная система действует по принципу обратной связи.
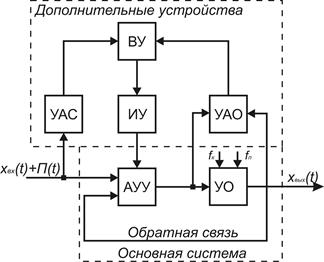
| Точность работы комбинированных систем выше точности систем, использующих только один из принципов управления. Причем, недостатки обоих принципов при их объединении в основном устраняются. Принцип адаптации. Рассмотренные принципы автоматического управления долгое время были единственными. Однако успешное развитие кибернетики позволило применить в автоматических системах новый принцип управления, называемый принципом адаптации (приспособления). Отличительные особенности этого принципа поясним на примере самонастраивающейся автоматической системы (рис. 10), которая состоит из основной системы и дополнительных устройств. |
| Рис. 10. Блок-схема самонастраивающейся автоматической системы. |
Для уменьшения динамической ошибки следящей системы в ее схему включен тахогенератор (ТГ), якорь которого кинематически связан с задающим валом, а выходное напряжение uт.г. подается на второй вход усилителя. Следовательно, управляющее воздействие uу на исполнительный двигатель зависит не только от рассогласования ∆α, но и от скорости вращения задающей оси αвх. Цепь компенсации динамической ошибки, образованная тахогенератором, является дополнительной связью в системе и основным признаком комбинированного управления.
Основная система построена на основе принципа управления по отклонению и включает управляемый объект (УО) и автоматическое управляющее устройство (АУУ).
На ее вход вместе с полезным сигналом xвх (t) поступает помеха n (t). Спектральные плотности этих функций могут изменяться в процессе работы системы. Кроме координатного возмущения fk (t), на УО действует параметрическое возмущение fn (t), при этом динамические характеристики управляемого объекта изменяются в широких пределах. В таких сложных условиях работы система должна обладать способностью настройки своего основного управляющего устройства (АУУ).
Для достижения требуемых показателей качества процесса управления к основной системе подключены следующие дополнительные устройства, образующие контур самонастройки:
У с т р о й с т в о а н а л и з а в х о д н о г о с и г н а л а (УАС) оценивает свойства входного сигнала, например скорость и ускорение изменения задающего воздействия xвх (t), а также определяет спектральную плотность помехи n (t) или отношение сигнал/шум. Такой анализ необходим для выбора критерия оптимальности системы;
У с т р о й с т в о а н а л и з а о б ъ е к т а (УАО) предназначено для оценки изменений динамических характеристик управляемого объекта. Если, например, под воздействием параметрического возмущения fn (t) коэффициент, передачи объекта изменяется, то это изменение можно оценить количественно на основе анализа функций u (t) и xвых (t);
В ы ч и с л и т е л ь н о е у с т р о й с т в о (ВУ) определяет способ изменения характеристик основного управляющего устройства (параметров, структуры или закона управления) на основе заложенных в нем критериев оптимальности системы и информации, получаемой от устройств анализа сигнала и объекта;
И с п о л н и т е л ь н о е у с т р о й с т в о контура самонастройки (ИУ) выполняет функцию настройки управляющего устройства в соответствии с сигналами, получаемыми от вычислительного устройства. Воздействие самонастройки V является функцией многих переменных:

Таким образом, работу контура самонастройки можно представить как процесс автоматической настройки управляющего устройства основной системы по совокупности текущей информации об изменяющихся условиях работы для достижения поставленной цели управления.
Дата добавления: 2015-07-14; просмотров: 5400;