Основные законы управления
Под законом управления в теории автоматического управления понимают математическую зависимость, по которой автоматическое управляющее устройство или автоматический регулятор воздействуют на объект управления. На вход управляющего устройства поступает сигнал сравнения или рассогласования ε(t), а на выходе формируется сигнал управления (управляющее воздействие)u(t):
По виду математической зависимости между входной  и выходной величиной u(t)управляющего устройства непрерывные законы управления делятся:
и выходной величиной u(t)управляющего устройства непрерывные законы управления делятся:
1) пропорциональный закон управления (П-закон)
 (1.2)
(1.2)
гдеkр – коэффициент передачи (пропорциональности) П-регулятора
П-закон управления – это такой закон управления, при котором величина выходного сигнала u(t) пропорциональная величине управляющего сигнала ε(t). В этом случае коэффициент пропорциональности называется коэффициентом усиления или передачи.
2) интегральный закон управления (И-закон) – это закон управления, в котором выходная величина u(t) пропорциональная интегралу от задающего воздействия ε(t):
 (1.3)
(1.3)
где  - постоянная времени интегрирования И-регулятора;kр – коэффициент передачи (пропорциональности) И-регулятора
- постоянная времени интегрирования И-регулятора;kр – коэффициент передачи (пропорциональности) И-регулятора
Регуляторы, осуществляющие такой закон управления называются И-регуляторами.
3) пропорционально-интегральный закон управления (ПИ-закон) – является комбинацией П и И – законов регулирования.
 (1.4)
(1.4)
Регуляторы, осуществляющие такой закон управления называются ПИ-регуляторами.
4) пропорционально-интегрально-дифференциальный закон управления (ПИД-закон)
 (1.5)
(1.5)
где  - постоянная времени дифференцирования
- постоянная времени дифференцирования
Сравнительная оценка законов регулирования:
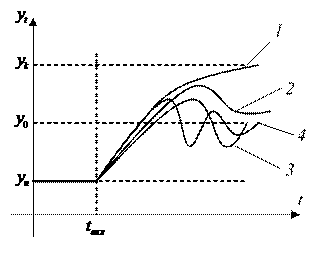
Рис.1.10. Сравнительная оценка реализации автоматическими регуляторами непрерывных законов управления. На рисунке показано:  - начальное значение управляемой величины; - конечное значение управляемой величины (установившееся значение) при отсутствии регуляторов в системе;
- начальное значение управляемой величины; - конечное значение управляемой величины (установившееся значение) при отсутствии регуляторов в системе;  - требуемое значение управляемой величины. Также показано: 1 – система с самовыравниванием без автоматического регулятора; 2 – система с П-регулятором; 3 – система с ПИ-регулятором; 4 – система с ПИД-регулятором
- требуемое значение управляемой величины. Также показано: 1 – система с самовыравниванием без автоматического регулятора; 2 – система с П-регулятором; 3 – система с ПИ-регулятором; 4 – система с ПИД-регулятором
Помимо непрерывных законов управления существует дискретный закон управления (релейный закон) который не имеет математической связи между входным и выходным воздействием.
При расчете таких регуляторов пользуются графо-аналитическими методами.

Рис.1.11. Динамические характеристики позиционного (релейного) регулятора: y0 – заданное (предписанное) значение управляемой величины; 2а – зона нечувствительности (неоднозначности) релейного регулятора
Дата добавления: 2015-07-14; просмотров: 1209;