МЕХАНІЗМИ ПЕРЕТВОРЕННЯ СИЛ І ШВИДКОСТЕЙ В АПАРАТІ
РУХУ
Як випливає из рівняння Хіла, кожний м'яз здатний розвивати силу Р и швидкість V у певному діапазоні величин:
0 < P < Pm; 0 < V < Vm
Однак умови життєдіяльності організму настільки різноманітні, що таких значень може виявитися недостатньо. Для розширення цих діапазонів потрібні механізми, здатні перетворювати сили й швидкості. З механіки відомо, що найпростішим механізмом подібного роду є важіль - тверде тіло, що не піддається деформації та має точку опори (обертання).
Рис. 19
В організмі людини функцію важелів виконують кістки кістяка, які мають точки опори (точніше кажучи, обмежені поверхні контакту) з матеріальними тілами навколишнього середовища або з іншими костями.
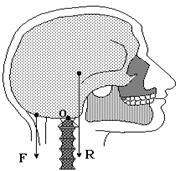
Рис. 20
Прийнято розрізняти важелі першого й другого роду. Під важелем першого роду розуміють такий, у якого точка опори розташована між лініями діючих сил (pис. 19).
Найкоротша відстань від точки опори до лінії дії відповідної сили називається плечем. Надалі будемо позначати силу, що розвивається м'язом, F, а її плече а; R- являє собою навантаження, проти якого працює м'яз, b - її плече. У якості навантажень найбільше часто виступає сила ваги окремих структурних компонентів організму (голови, плеча, тулуба і т.д.). В апараті руху важелі першого роду використовуються відносно рідко. Типовим прикладом такого важеля може служити череп, що має точку опори на першому хребці (рис. 20). У цьому випадку вага черепа є навантаженням, прикладеним до центру ваги черепа.
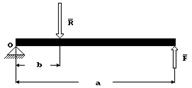
Рис. 21
Лінія дії цієї сили розташовується попереду від точки опори. Сила м'яза, що врівноважує навантаження, що й забезпечує збереження положення й рух черепа, розташовується позаду від точки обертання. До важелів другого роду належать такі, у яких лінії діючих сил перебувають по один бік від точки опори (рис.16). Ці важелі дуже широко представлені в опорно-руховому апараті. За суттю справи, усі елементи кінцівок (кисть, передпліччя, плече, стопа, гомілка, стегно) є важелями другого роду.
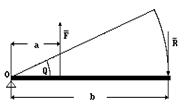
Рис. 22
Під перетворювачем швидкості розуміють важіль (рис. 22), для якого плече навантаження більше плеча м'язової сили b > а. Якщо при скороченні м'яза важіль рівномірно повертається на кут Q за час t, кутова швидкість обертання буде рівна w = Q/t.
Лінійна швидкість руху кожної точки важеля виражається добутком кутової швидкості на радіус повороту, яким у цьому випадку є відстань від точки опори до відповідної точки важеля. Тоді для лінійної швидкості руху точок прикладення м'язової сили й навантаження будемо мати:
V1 = w a і V2 = w b
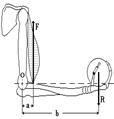
Рис. 23
Відношення швидкості руху точки прикладення навантаження до швидкості точки прикладення м'язової сили називається коефіцієнтом перетворення швидкості:
k1 = V2 / V1 = w b / w a = b/a
При скороченні м'яза точка прикріплення його до кістки буде переміщатися з лінійною швидкістю V1, а точка дії сили навантаження - зі швидкістю V2 = k1 ´V1. Оскільки k1 > 1, V2 > V1. Як показує проведений аналіз, розглянутий важіль збільшує швидкість переміщення навантаження V2 стосовно швидкості скорочення м'яза V1. Саме цей ефект мають на увазі, коли говорять про важіль перетворення швидкості. На рисунку 23 представлена схема передпліччя, як важеля перетворювача швидкості. Так при а = 3 см, b = 30 см у цьому випадку k1 = 10.
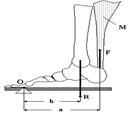
Рис. 24
Важелі - перетворювачі сил - дозволяють урівноважувати більші навантаження відносно малими м'язовими силами. Для таких важелів плече м'язової сили a > b. Як відомо з фізики, рівновага важеля настає в тому випадку, якщо сума моментів прикладених сил дорівнює нулю. Для нашого випадку цю умову слід записати у вигляді: М1 = М2 (або af = br), де М1 = аf - момент м'язової сили, а М2 = br - момент навантаження.
Відношення величини навантаження до сили м'язового скорочення називається коефіцієнтом перетворення сил. Як випливає із наведених вище співвідношень, ця величина дорівнює:
k2 = R/F = a/b
М'язова сила буде врівноважувати тем більше навантаження, чим більше співвідношення а/b. На рисунку 24 представлена схема стопи як перетворювача м'язової сили.
Дата добавления: 2015-06-22; просмотров: 1425;