Произвольная плоская система сил
2.2.1 Равновесие твёрдого тела при наличии плоской системы сил. Случай
параллельных сил.
Равнодействующая двух параллельных сил, направленных в одну сторону,
равна по модулю сумме модулей слагаемых сил и направлена в туже сторону. Линия действия равнодействующей делит внутренним образом расстояние между линиями действия слагаемых сил на части, обратно пропорциональные этим силам:
 .
.
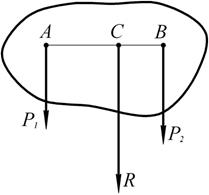
Рис. 1.29
Равнодействующая, двух параллельных сил, не равных по модулю  , и направленных в разные стороны, равна по модулю, разности модулей этих сил, и направлена в сторону большей силы. Линия действия равнодействующей делит внешним образом расстояние между линиями действия слагаемых сил на части, обратно пропорционально этим силам.
, и направленных в разные стороны, равна по модулю, разности модулей этих сил, и направлена в сторону большей силы. Линия действия равнодействующей делит внешним образом расстояние между линиями действия слагаемых сил на части, обратно пропорционально этим силам.
 ;
;  .
.
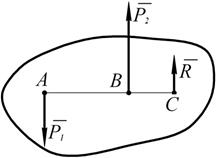
Рис. 1.30
Система двух параллельных сил, равных по модулю и направленных в разные стороны, называется парой сил.
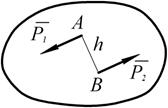

h – плечо пары.
Рис. 1.31
Так как две силы, равны по модулю и направленные в разные стороны, не лежат на одной линии действия, то твёрдое тело, к которому приложена пара сил, не находится в равновесии. Пара сил стремится повернуть твёрдое тело, к которому она приложена.
Мерой действия пары сил является алгебраическая величина, называемая моментом. Момент пары сил равен по абсолютной величине произведению модуля одной из сил пары на плечо.
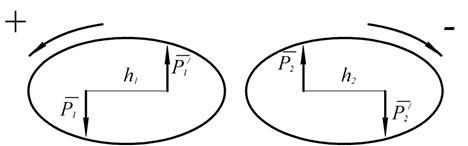


Рис. 1.32 Рис. 1.33
Теория пар сил на плоскости сводится к трем теоремам.
Теорема 1. Не нарушая состояния твёрдого тела, пару сил можно переносить в плоскости её действия.
Теорема 2. Пара сил, моменты которых равны, эквивалентны (Пара сил называется эквивалентными, если одну из пар можно заменить другой, не нарушая состояния твёрдого тела).


Рис. 1.34
Это значит что, не нарушая состояния твёрдого тела, можно изменить величину плеча, либо величину силы, сохраняя при этом неизменным момент пары сил.
Теорема 3. (сложение пар сил на плоскости) При сложении нескольких пар сил на плоскости получается равнодействующая пара, момент которой “m” равен сумме моментов слагаемых пар:

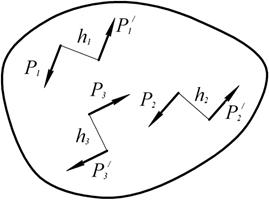
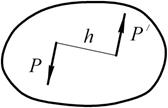
Рис. 1.35



Для равновесия твёрдого тела под действием пары сил, лежащих в одной плоскости, необходимо и достаточно, чтобы сумма моментов слагаемых пар равнялась нулю
2.2.2. Теорема о параллельном переносе силы.
Силу, приложенную к твёрдому телу, можно не изменяя оказываемого действия, переносить параллельно ей самой в любую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится.
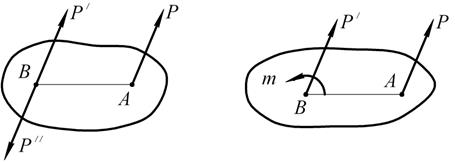


Рис. 1.36
Пусть на твёрдое тело, действует сила  в точке А. Действие этой силы, не изменится, если в любой точке В, приложить две уравновешивающиеся силы
в точке А. Действие этой силы, не изменится, если в любой точке В, приложить две уравновешивающиеся силы  и
и  . Полученная система трёх сил и представляет собой силу равную
. Полученная система трёх сил и представляет собой силу равную  , но приложенную в точке В и пару
, но приложенную в точке В и пару  с моментом
с моментом  .
.
2.2.3. Приведение плоской системы сил к данному центру.
Пусть на твёрдое тело действует какая-нибудь система сил  . Возьмём в этой плоскости произвольную точку О, которую назовём центром приведения, и перенесём все силы в центр О.
. Возьмём в этой плоскости произвольную точку О, которую назовём центром приведения, и перенесём все силы в центр О.
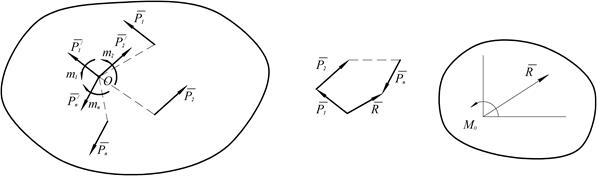
Рис. 1.37
В результате на тело будет действовать: система сил

и система пар, моменты которых равны:

Силы приложенные в центре О, можно заменить одной силой  , при этом
, при этом
 или
или  . Согласно теореме о сложении пар, все пары можно заменить одной парой
. Согласно теореме о сложении пар, все пары можно заменить одной парой
 или
или 
Главным вектором называется векторная сумма сил, приложенных к твёрдому телу

Проекции главного вектора на координатные оси равны суммам проекций слагаемых сил:
Модуль главного вектора:
Направляющие главного вектора:


Главным моментом  относительно центра О называется сумма моментов сил, приложенных к твёрдому телу, относительно этого центра
относительно центра О называется сумма моментов сил, приложенных к твёрдому телу, относительно этого центра

Итак мы показали, что всякая плоская система сил, действующая на абсолютно твёрдое тело, при приведении к произвольному центру О заменяется одной силой , равной главному вектору системы приложенной в центре приведения, и одной парой с моментом , равным главному моменту системы относительно центра О.
2.2.4.Условия равновесия произвольной плоской системы сил.
Для равновесия любой плоской системы необходимо и достаточно, чтобы одновременно выполнялись условия:
1. Основная форма записи условия равновесия
Величина и определяются уравнениями:

где 
 может равняться нулю только, когда одновременно
может равняться нулю только, когда одновременно  . Следовательно, условия равновесия будут выполняться, если:
. Следовательно, условия равновесия будут выполняться, если:

Для равновесия произвольной плоской системы сил, необходимо и достаточно, чтобы суммы всех сил на каждую из двух координатных осей и сумме их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.
2. Вторая форма записи условий равновесия.
Для равновесия произвольной плоской системы сил, необходимо и достаточно, чтобы суммы моментов всех этих сил относительно каких–нибудь двух центров А и В и сумма их проекций на ось Оx не перпендикулярную к прямой АВ, были равны нулю:

3. Третья форма

Должно соблюдаться условие А, В, С не лежат на одной прямой.
Дата добавления: 2015-06-17; просмотров: 1477;