ОПРЕДЕЛЕНИЕ СИЛ ИНЕРЦИИ В МЕХАНИЗМАХ
Силы инерции материальных точек звена могут быть приведены к одной точке и, таким образом, представлены их главным вектором и главным моментом.
Главный вектор сил инерции, называемый обычно силой инерции звена, равен
 . (3.1)
. (3.1)
где m[кг] – масса звена, aS[мсек-2] – ускорение центра S масс звена. Направление силы инерции Pи противоположно по направлению вектора aS. Её размерность [кгмсек-2], т.е. она измеряется в ньютонах [Н].
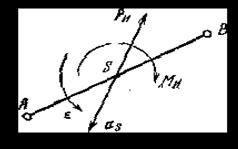
Мы ограничимся рассмотрением случаев, когда звено совершает плоскопараллельное движение и имеет плоскость материальной симметрии, параллельную плоскости его движения. При этом точкой приведения сил инерции звена целесообразно брать его центр масс (рисунок 3.1), так как упрощается выражение момента инерционной пары сил – главного момента сил инерции, что то же, инерционного момента. Он оказывается равным
 , (3.2)
, (3.2)
где IS [кгм2] – момент инерции масс звена относительно оси, проходящей через его центр масс перпендикулярно плоскости его материальной симметрии, или, иначе, центральный момент инерции звена, ε [сек-2] - угловое ускорение звена.
Инерционный момент Ми имеет размерность [кгмсек-2]=[Нм]. Плоскость, в которой он действует, параллельна плоскости движения звена; он направлен в сторону, противоположную направлению углового ускорения звена (рисунок 3.1).
|
|
Частные случаи инерционной нагрузки
· Поступательное движение звена (рисунок 3.2, а). Инерционная нагрузка состоит из одной инерционной силы Ри, определяемой формулой (3.1).
· Неравномерное вращательное движение звена (рисунок 3.2, б). Инерционная нагрузка состоит из силы инерции Ри, определяемой формулой (3.1), и инерционного момента Ми, определяемого формулой (3.2). Модуль полного ускорения центра масс звена в этом случае равен
 , (3.3)
, (3.3)
где  и
и  - нормальное (центростремительное ) и касательное (тангенциальное) ускорения центра масс звена, ω и ε – угловая скорость и угловое ускорение звена, ℓAS – расстояние от центра масс S до оси А вращения звена.
- нормальное (центростремительное ) и касательное (тангенциальное) ускорения центра масс звена, ω и ε – угловая скорость и угловое ускорение звена, ℓAS – расстояние от центра масс S до оси А вращения звена.
Силу Ри и момент Ми можно привести к одной силе  .
.
Для этого следует силу Ри приложить, сохраняя ее направление, в центре К качания звена (рисунок 3.2, в). Расстояние ℓAK центра качания К звена от оси вращения последнего А равно
 , (3.4)
, (3.4)
где IS – центральный момент инерции звена, а m – его масса.
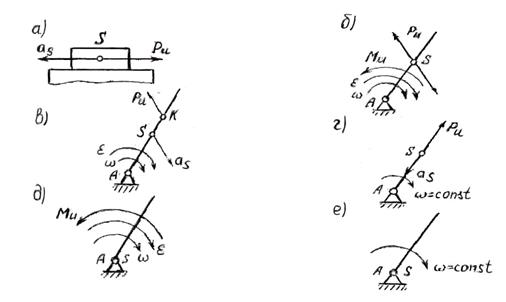
Рисунок 3.2 – Частные случаи инерционной нагрузки
· Равномерное вращательное движение звена (рисунок 3.2, г). Инерционная нагрузка состоит только из силы инерции Ри звена, которая в этом случае направлена по линии AS противоположно направлению вектора центростремительного (нормального) ускорения центра масс звена. Это ускорение равно
 , (3.5)
, (3.5)
и, следовательно, центробежная сила инерции будет рана
 . (3.6)
. (3.6)
Произведение mℓAS называется неуравновешенностью или дисбалансом и имеет размерность [кг·м].
· Неравномерное вращательное движение звена при совпадении центра масс S звена с его осью вращения А (рисунок 3.2, д). В этом случае инерционная нагрузка звена состоит только из инерционного момента Ми, который находится по формуле (3.2).
· Равномерное вращательное движение звена при совпадении центра масс S звена с его центром вращения А (рис. 3.2, е). В этом случае ℓAS = 0 и в соответствии с формулой (3.3) aS=0, следовательно, Ри=0, и так как ε=0 (равномерное вращение), то Ми=0.
В этом случае инерционная нагрузка звена равна нулю и оно называется уравновешенным (следует помнить, что рассматривается плоская система сил).
Пример. Для кривошипно-ползунного механизма (рисунок 3.3) определить инерционную нагрузку всех звеньев.
Исходные данные: длины звеньев ℓАВ=0,074 м, ℓВС=0,200 м; положения центров масс ℓАS1=0,020 м, ℓВS2=0,060 м; массы звеньев m1=10 кг, m2=0,5 кг, m3=0,4 кг; осевой момент инерции шатуна IS2=0,0018 кгм2; угловая скорость кривошипа ω1=200 с-1.
Задачу решить для положения, когда угол φ=45о.
Решение. 1). Построение схемы механизма (рисунок 3.3, а).
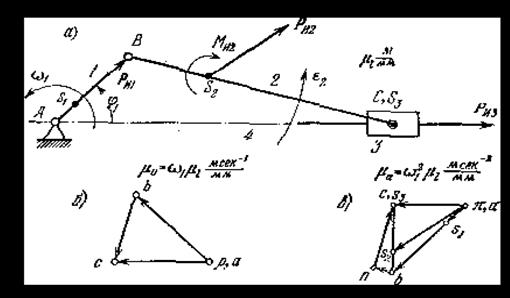
Рисунок 3.3 – Определение инерционной нагрузки звеньев
кривошипно-ползунного механизма
Задаемся масштабом чертежа μℓ=0,001 м/мм и строим схему механизма. Чертежные длины звеньев определятся
2). Построение плана скоростей(рисунок 3.3,б). Рассчитываем масштаб скорости в масштабе кривошипа.μυ = ω1 μℓ=200·0,001= 0,20  . Тогда длина вектора скорости υВ, т.е. отрезок (Рb), будет равен (АВ)=(Рb)=74 мм. Точку “с” на плане скоростей находим по векторному уравнению
. Тогда длина вектора скорости υВ, т.е. отрезок (Рb), будет равен (АВ)=(Рb)=74 мм. Точку “с” на плане скоростей находим по векторному уравнению
 .
.
3). Построение плана ускорений(рисунок 3.3, в). Строим план ускорений в масштабе кривошипа

Тогда на плане ускорений отрезок (πb), изображающий вектор нормального ускорения точки В, будет равен (АВ)=(πb)=74 мм. Точку “с” находим по векторному уравнению
 .
.
Отрезок (nb), изображающий на плане нормальное ускорение  , определится из равенства
, определится из равенства
где (bс)=52 мм – отрезок, замеренный с плана скоростей.
ТочкиS1, S2определим по правилу подобия, п.2. Но т.к. план ускорений построен в масштабе кривошипа, то (πs1)=(AS1)= 20 мм, (bs2)=(BS2)= 60 мм. Тогда ускорения центров масс определятся
aS1 = (πs1)·μa = 20·40 = 800 м/с2,
aS2 = (πs2)·μa = 64·40 = 2560 м/с2,
aS3 = аС =(πс)·μa = 56·40 = 2240 м/с2.
Угловые ускорения находятся по формулам
ε1=0, т.к. ω1=const,

Направление ε2 будет против часовой стрелки в соответствие с направлением  тангенциального ускорения точки С звена ВС относительно точки В (рисунок 3.3, а).
тангенциального ускорения точки С звена ВС относительно точки В (рисунок 3.3, а).
4). Расчет инерционной нагрузкидля каждого звена.
а)Расчет инерционных сил.Сила инерции кривошипа равна
Ри1=m1aS1=10·800=8000 H.
Вектор силы инерции приложен к центру масс кривошипа и направлен в противоположную сторону вектору ускорения aS1.
Сила инерции шатуна
Ри2=m2aS2=0,5·2560=1280 H.
Вектор силы инерции приложен к центру масс шатуна и направлен в противоположную сторону вектору ускорения aS2.
Сила инерции ползуна
Ри3=m3aС=0,4·2240=896 H.
Вектор силы инерции приложен к центру масс ползуна и направлен в противоположную сторону вектору ускорения aС.
б)Расчет инерционных моментов. Для кривошипа инерционный момент равен Ми1=0, т.к. звено вращается равномерно.
Для шатуна инерционный момент определится по формуле
Ми2= ε2·IS2=10000·0,0018=18 Нм.
Этот момент направлен в противоположную сторону угловому ускорению.
Для ползуна момент инерции Ми3=0, т.к. звено движется поступательно.
Дата добавления: 2015-06-01; просмотров: 11669;