ЗАДАЧИ 48-51
Задача 48. Определить массу противовеса mпр, который надо установить на вращающийся вал для уравновешивания сил инерции грузов с массами m1, m2, m3 и m4, лежащих в одной перпендикулярной к оси вала плоскости. Исходные данные: координата центра масс Sпр противовеса ρпр=15 мм; массы грузов m1=5 кг, m2=7 кг, m3=8 кг, m4=10 кг; расстояния от оси вала до центров масс S1, S2, S3 и S4 грузов равны ρ1=10 мм, ρ2=20 мм, ρ3=14 мм, ρ4=10 мм; углы закрепления грузов α12=α23=α34=90о.
Задача 49. Определить массы противовесов mпр1 и mпр2, которые надо установить на плоскости уравновешивания I и II для уравновешивания сил инерции грузов с массами m1, m2, m3 и m4, лежащих в плоскости, содержащей ось вала. Исходные данные: координаты центров масс Sпр1 и Sпр2 противовесов ρпр1=50 мм, ρпр2=40 мм; массы грузов m1=2 кг, m2=3 кг, m3=2 кг, m4=4 кг; расстояния от оси вала до центров масс S1, S2, S3 и S4 грузов равны ρ1=10 мм, ρ2=16 мм, ρ3=12 мм, ρ4=20 мм; расстояния между грузами ℓ12=ℓ23=ℓ34=100 мм.
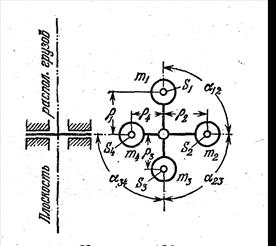
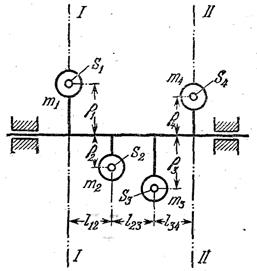
К задаче 48 К задаче 49
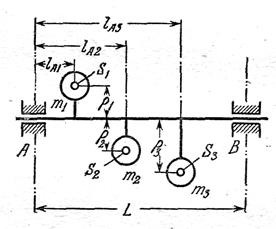
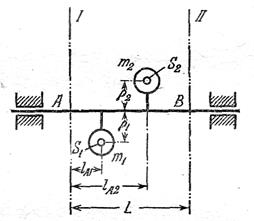
К задаче 50 К задаче 51
Задача 50. Определить реакции RA и RB в подшипниках вала от сил инерции грузов. Исходные данные: массы грузов m1=1,0 кг, m2=0,5 кг, m3=0,25 кг; центры масс всех грузов расположены в плоскости, содержащей ось вращения вала АВ. Координаты центров масс S1, S2, иS3 грузов равны ρ1=100 мм, ρ2=100 мм, ρ3=200 мм; расстояния грузов от подшипника А: ℓА1=100 мм, ℓА2=300 мм, ℓА3=400 мм; расстояния между опорами А и В L=500 мм, угловая скорость вала ω=20 с-1.
Задача 51. Определить массы противовесов mпр1 и mпр2, которые надо установить на плоскости уравновешивания I и II для уравновешивания сил инерции грузов с массами m1 иm2, лежащих в плоскости, содержащей ось вращения вала. Исходные данные: координаты центров масс Sпр1 и Sпр2 противовесов ρпр1=ρпр2=100 мм; массы грузов m1=0,2 кг, m2=0,1 кг; координаты центров масс S1 и S2 грузов от плоскости уравновешивания I равны ℓА1=200 мм, ℓА2=400 мм; расстояния между плоскостями уравновешивания L=600 мм.
3.2.2 Полное или частичное уравновешивание результирующей силы инерции механизма.Для решения этой группы задач необходимо построить схему механизма, одна из точек которого описывает траекторию движения общего центра масс механизма. Затем построить планы скоростей и ускорений и определить главный вектор сил инерции по формуле
Ри=-m∑ аS, (3.8)
где m∑ - суммарная масса всех подвижных звеньев механизма, аS – ускорение общего центра масс механизма.
Главный вектор Рисил инерции механизма будет равен нулю только тогда, когда вектор полного ускорения аS центра масс будет также равен нулю. Это условие выполняется, если общий центр масс S механизма находится в точке, неподвижной относительно стойки. При частичном уравновешивании вектора Ри он может иметь заданное направление или модуль.
§1 Определение общего центра масс механизма.Положение центра масс механизма может быть найдено методом главных векторов из условия, что
rS=∑hi, (3.9)
где rS – радиус-вектор общего центра масс механизма, hi – главный вектор силы инерции i-того звена.
Применительно к шарнирному четырехзвенному механизму (рисунок 3.5) и кривошипно-ползунному механизму (рисунок 3.6) соотношение (3.9) примет вид
 , (3.10)
, (3.10)
где rS – радиус-вектор общего центра масс механизма, h1 – главный вектор силы инерции кривошипа ОА, h2 – главный вектор силы инерции шатуна АВ, h3 – главный вектор силы инерции коромысла ВСили ползуна. Все эти вектора параллельны звеньям, т.е.
h1÷÷ ℓОА, h2÷÷ ℓАВ, h3÷÷ ℓВС.
 Величины главных векторов сил инерции звеньев равны
Величины главных векторов сил инерции звеньев равны
h1= [m1ℓOS1+(m2+m3)ℓОА]/m∑
h2=[m2ℓАS2+(m3)ℓАВ]/m∑ (3.11)
h3=m3ℓBS3/m∑,
где m1, m2, m3 - массы звеньев (кг); суммарная масса m∑ = m1 + m2 + m3, ℓOS1, ℓАS2, ℓBS3 – расстояния до центров масс звеньев (м); ℓОА, ℓАВ, ℓВС – длины звеньев (м).
Как видно из соотношений (3.11), модули векторов h1, h2, h3 зависят от величин и расположения масс подвижных звеньев.
Рассмотрим определение общего центра масс каждого механизма.
Пример 1. Определить общий центр масс коромыслового механизма(рисунок 3.5).Исходные данные. Длины звеньев в м: ℓОА, ℓАВ, ℓВС; расстояния до центров масс в м: ℓОS1, ℓАS2, ℓВS3; массы звеньев в кг: m1, m2, m3. Массы звеньев сосредоточены в центрах масс.
Определить. rS - радиус-вектор, определяющий положение центра тяжести механизма.
Решение. Рассчитываем масштабный коэффициент длины μℓ = ℓОА/ОА и изображаем схему механизма (см. главу 2, §2.1, 2.2, 2.3).
По формулам (3.11) определим величины главных векторов сил инерции
h1= [m1ℓOS1+(m2+m3)ℓОА]/m∑
h2=[m2ℓАS2+(m3)ℓАВ]/m∑
h3=m3ℓBS3/m∑,
где m∑ = m1 + m2 + m3.
Рассчитаем чертежные величины главных векторов сил инерции
[h1]=h1/μℓ; [h2]=h2/μℓ; [h3]=h3/μℓ.
Радиус-вектор положения центра масс определяется по формуле (3.10):
 .
.
Уравнение векторное, поэтому решаем его, применяя правила сложения векторов. Из точки О на схеме механизма (рисунок 4.4) проводим вектор h1÷÷ℓОА длиной [h1]. К концу этого вектора прибавляем вектор h2÷÷ℓАВ длиной [h2], а затем вектор h3÷÷ℓВС длиной [h3]. Конец вектора h3 даст точку S – центр масс механизма. Соединим точкуS с точкой О – получим чертежное значение вектора rS.

Рисунок 3.5. - Определение центра масс коромыслового механизма
Действительное значение радиус-вектора положения центра масс определиться по формуле:
rS = [rS]μℓ = (м),
где [rS] - чертежное значение радиус-вектора, замеренное с чертежа в мм.
Пример 2. Определить общий центр масс кривошипно-ползунного механизма(рисунок 3.6). Исходные данные. Длины звеньев в м: ℓОА, ℓАВ; расстояния до центров масс в м: ℓОS1, ℓАS2, ℓВS3; массы звеньев в кг: m1, m2, m3. Массы звеньев сосредоточены в центрах масс.
Определить. rS - радиус-вектор, определяющий положение центра тяжести механизма.
Решение. Аналогично предыдущему Примеру 1 вычисляем масштабный коэффициент длины μℓ и вычерчиваем схему механизма (рисунок 3.6). Вычисляем главные вектора сил инерции по формулам (3.11):
h1= [m1ℓOS1+(m2+m3)ℓОА]/m∑
h2=[m2ℓАS2+(m3)ℓАВ]/m∑
h3=m3ℓBS3/m∑,
где m∑ = m1 + m2 + m3.
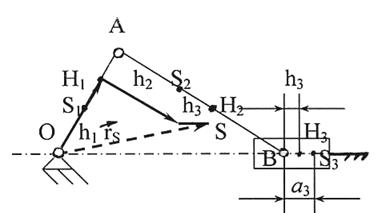
Рисунок 3.6. - Определение центра масс кривошипно-ползунного
механизма
Вычисляем чертежные значения главных векторов сил инерции: [h1]=h1/μℓ, [h2]=h2/μℓ, [h3]=h3/μℓ. Внимание! Если центр масс S3 ползуна совпадает с точкой В, то а3=0 и h3=0. Радиус-вектор общего центра масс определиться из векторного уравнения (3.10)
 .
.
Из построения определиться чертежное значение rS, а по формуле rS = [rS]μℓ, действительное значение радиус-вектора в м.
Дата добавления: 2015-06-01; просмотров: 2415;