Понятие устойчивости систем
Любая система должна быть прежде всего работоспособной. Это значит, что она должна нормально функционировать при действии на нее различных внешних возмущений. Иными словами, система должна работать устойчиво.
Понятие устойчивости системы управления связано со способностью возвращаться в состояние равновесия после исчезновения внешних воздействий, которые вывели ее из этого состояния. Данное определение является физическим определением понятия устойчивости. Наглядно устойчивость равновесия иллюстрируется на рис.5.1. Здесь положение шарика определяется координатой y. Выведем шарик из положения равновесия в точку y0 и отпустим его.
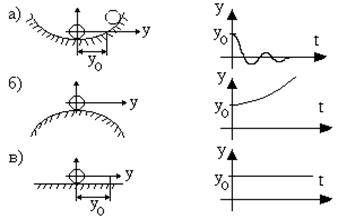
Рис. 5.1. Иллюстрация понятия устойчивости
Из анализа изменения координаты y(t) следует:
а) y(t)®0 при t®¥, устойчивое положение шарика;
б) y(t)®¥ при t®¥, неустойчивое положение шарика;
в) y(t)=y0=const при t³0, нейтральное или безразличное положение шарика.
Таким образом, устойчивость характеризуется свободным поведением системы.
Общая теория устойчивости разработана А.М. Ляпуновым. Сформулируем математическое определение устойчивости, используя следующее геометрическое представление (рис.5.2).
Система управления n-ого порядка описывается дифференциальным уравнением в форме Коши:
 , где
, где  (i = 1, 2, ... , n). (5.1)
(i = 1, 2, ... , n). (5.1)
Состояние системы можно изобразить точкой в пространстве, координатами которого являются переменные системы (x1, x2, ... , xn). Начало координат этого пространства соответствует равновесному состоянию системы. Тогда решение уравнения (5.1) можно рассматривать как некоторую траекторию X(t) в пространстве переменных (x1, x2, ... , xn).
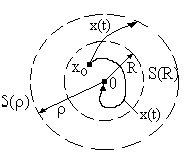
Рис.5.2. Траектории движения,
соответствующие устойчивой и неустойчивой системам
Положение равновесия в начале координат может быть, по Ляпунову, устойчиво, асимптотически устойчиво и неустойчиво.
Положение устойчиво, если для любого R<r существует такое r£R, что траектория X(t), начинающаяся в точке x0 сферической области S(r), все время остается в сферической области S(R). Иначе говоря, траектория X(t), начинающаяся внутри области S(r), никогда не достигает сферы S(R).
Положение асимптотически устойчиво, если оно устойчиво и, сверх того, существует такое R<r, что траектория X(t), начинающаяся в сферической области S(R), стремится к началу координат при неограниченном росте времени.
Положение неустойчиво, если для некоторого (хотя бы одного) R<r и любого r, каким бы малым r не выбиралось, всегда найдется внутри сферической области S(r) такая точка x0, что траектория X(t), начинающаяся в этой точке, достигает за конечное время сферы S(R).
Таким образом, чтобы решить вопрос об устойчивости системы, необходимо определить траекторию ее движения в пространстве состояний, то есть найти решение дифференциального уравнения, которое описывает исследуемую систему.
Дата добавления: 2015-06-01; просмотров: 1013;