Роботы в технике.
Механизмы с высшими и низшими кинематическими парами находят широкое применение в технике. Они являются носителями движений в станках для обработки различных материалов, в различных машинах, в составе разннобразных автоматических линий и т.д.
Роботом называется техническое устройство, предназначенное для воспроизведения некоторых функций человека.
Манипуляционным роботом называется техническое устройство, предназначенное для воспроизведения рабочих функций рук человека в процессе его трудовой деятельности.
Манипуляционный робот (рис.2.47) состоит из манипулятора, исполнительных устройств, устройства очувствления связи с оператором и ЭВМ.
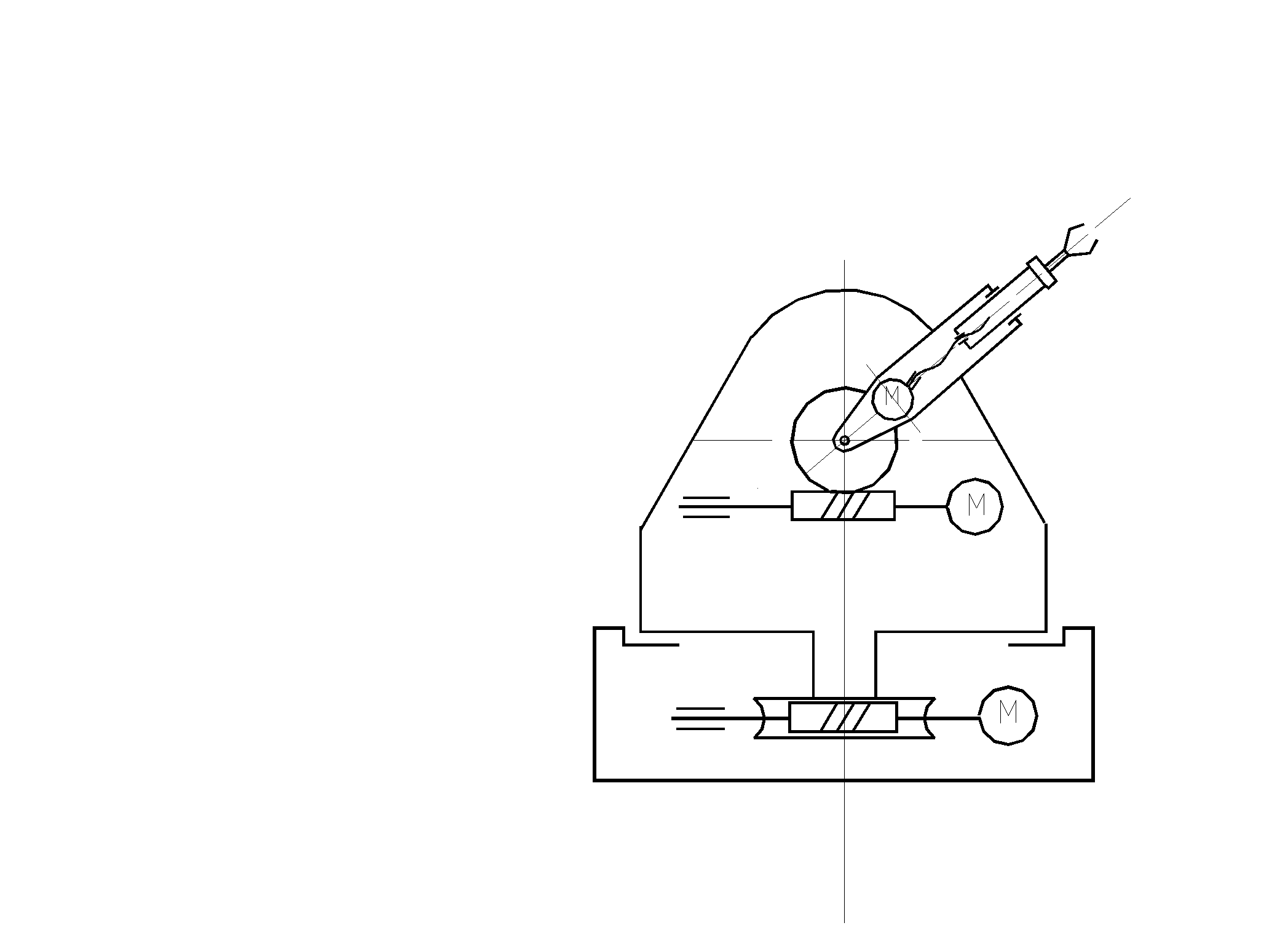
Рис.2.50.
Схема манипуляционного
робота.
Манипулятор выполняет функции руки человека и представляет собой многозвенный разомкнутый механизм с вращательными и поступательными кинематическими парами пятого класса. Степень подвижности манипуляторов находится в пределах 3…10. Функцию кисти выполняет так называемый схват или специальный технологический инструмент (гайковерт, пульверизатор…). Конструкция схвата предусматривает выполнение операций с определенным типом деталей.
Исполнительные устройства представляют собой системы приводов для отдельных степеней подвижности. Приводы могут быть электрические, пневматические, гидравлические. Они могут быть расположены как на манипуляторе, так и в непосредственной близости от шарниров.
Устройства очувствления делятся на устройства сбора информации о внутреннем состоянии (сенсеры углов, скоростей и ускорений) и о внешней среде (тактильные и локационные сесеры, информирующие о соприкосновении и приближении к предметам). К этим устройствам относятся также сенсеры усилий, радары, датчики, фиксирующие температуру и др.
Устройства связи с оператором- это видеоконтрольные пульты, печатающие устройства, дисплеи и графопостроители.
ЭВМ служит для переработки всей поступающей информации.
Характеристиками манипуляторов являются:
число степеней подвижности; маневренность (число степеней подвижности при неподвижном схвате); рабочий объем- объем, ограниченный возможными положениями схвата; коэффициент сервиса- отношение y/(4p), где y- телесный угол, внутри которого схват можно подвести к заданной точке.
Дата добавления: 2015-02-23; просмотров: 1141;