Общая характеристика и параметры. Для уменьшения нагрузок на механизм изменения вылета, для обеспечения устойчивости крана и безопасности работы стреловые системы портальных кранов
Для уменьшения нагрузок на механизм изменения вылета, для обеспечения устойчивости крана и безопасности работы стреловые системы портальных кранов уравновешивают подвижными противовесами. К уравновешивающим устройствам предъявляются следующие требования.
1. Уравновешенность стрелы нужно обеспечить на всем диапазоне вылетов; в соответствии с техническими условиями (ТУ) на портальные краны АО «Подъемтрансмаш» отклонение от уравновешенности допускается не более 15 % от момента, создаваемого весом стрелового устройства на наибольшем вылете относительно корня стрелы.
2. Предпочтительно, чтобы на наибольшем вылете неуравновешенный момент действовал в сторону уменьшения, на наименьшем — в сторону увеличения вылета, а на одном из промежуточных вылетов имело бы место положение устойчивого равновесия стреловой системы, к которому она будет стремиться при отказе механизма изменения вылета; желательно, чтобы это выполнялось без груза, с грузом и с грузозахватом. На рис. 1.47 представлены два графика стрелового неуравновешенного момента Мн = Мстр + Мпр, где Мстр и Мпр — моменты весов стреловой системы и противовеса, приведенные к корню стрелы (положительные моменты действуют в сторону увеличения вылета).
 Рис. 1.47. Графики изменения стрелового неуравновешенного момента Мн.(кривые 1 и 2 см. пояснения в тексте)
Рис. 1.47. Графики изменения стрелового неуравновешенного момента Мн.(кривые 1 и 2 см. пояснения в тексте)
|
Кривая 2 недопустима, поскольку при отказе механизма изменения вылета стреловая система будет с ускорением двигаться к одному из крайних вылетов, а не к устойчивому положению А при кривой 1.
3. Система уравновешивания должна быть простой по конструкции и отвечать ограничениями по компоновке (приемлемость расположения шарниров, обеспечение регламентированного заднего габарита поворотной части, удаленность от мертвых положений, расходимость противовеса и колонны на наименьшем вылете, форма противовеса и т.д.) Желательно, чтобы противовес был расположен достаточно далеко от оси вращения крана и приближался к ней по мере подъема стрелы, что способствует равновесию поворотной части с грузом.
Рассмотрим схемы уравновешивающих устройств, применяемых на портальных кранах (см. рис. 1.34). Противовес на консоли стрелы (рис. 1.48) обеспечивает полное уравновешивание на всех вылетах веса прямой стрелы, у которой центр тяжести находится на постоянном расстоянии от оси качания О1.
 Рис. 1.48. Схема уравновешивающего устройства с противовесом на консоли
Рис. 1.48. Схема уравновешивающего устройства с противовесом на консоли
|
Условие уравновешивания Gпrп= Gc rc, причем rc = ac сosac,
rп = aп cos aп. Таким образом, должен быть принят вес противовеса
 (1.66)
(1.66)
Правая часть (1.66) не зависит от вылета лишь при aс = aп, т.е. когда центры тяжести стрелы и противовеса и корень стрелы О1 лежат на прямой. Система с противовесом на стреле проста по конструкции, в ней нет сложной рычажной системы, но противовес располагается на двух консолях задней части стрелы, между которыми должна размещаться кабина крана (что может привести к двухъярусному расположению оборудования в кабине). Консоли испытывают значительный изгиб от горизонтальных сил инерции при вращении крана. Вес стрелы и противовеса проходит через ось качания стрелы О1 на расстоянии Rк от оси вращения и создает большой опрокидывающий момент и давления на передние катки опорно-поворотного устройства. На поворотной части нередко нужен неподвижный противовес для устойчивости крана против опрокидывания.
Рассмотренная система обеспечивает полное уравновешивание только для прямых стрел. Для шарнирно-сочлененных стрел, где момент от веса стрелового устройства, приведенный к оси качания стрелы, изменяется по вылету, полное уравновешивание не обеспечивается.
Достаточно универсально и наиболее широко используется устройство с шарнирным четырехзвенником, расположенным над поворотной платформой (см. рис. 1.41) (схемы уравновешивающих устройств с шарнирным шестизвенником [15]). Найдем выражения для моментов от веса элементов стрелового устройства Мстр и противовеса Мпр, приведенных к оси качания стрелы.
Потенциальная энергия П элементов системы изменения вылета (без груза) складывается из двух составляющих:
П = Пс + Пп,(1.67)
где Пс и Пп — соответственно потенциальные энергии звеньев стрелового и уравновешивающего устройств, которые в соответствии со схемой на рис. 1.41 определяются по формулам
Пс = – Gc lцс sinjc – Gx (lc sinjc – lцх sinax) –
– Gот (dот sinhот + lц.от sinaот), (1.68)
Пп = – Gп (dп sinhп – lп sinaп),(1.69)
где Gc, Gx, Gот, Gп– соответственно веса стрелы, хобота, оттяжки и противовеса; lцс, lцх, lц.от – длины, определяющие положения центров масс стрелы, хобота и оттяжки (см. рис. 1.41).
Так как обобщенные моменты определяются по формуле  то дифференцируя (1.68), найдем после преобразований выражение для стрелового момента МСТР в виде
то дифференцируя (1.68), найдем после преобразований выражение для стрелового момента МСТР в виде
МСТР = [ Gc lцс + (Gx + 0,5Gот) lc] cosjc –
– ux [Gx lцс cosax – 0,5Gот l2x cos(ax + e2)], (1.70)
где КПФ первого порядка ux и углы aх и e2 определяются соответственно по формулам (1.53), (1.52), (1.51).
Введем КПФ для uП первого порядка выражением вида
 (1.71)
(1.71)
положительное направление aп показано на рис. 1.41. В соответствии со схемой на рис. 1.49, расстояние от точки крепления тяги противовеса к стреле до точки О4
 (1.72)
(1.72)
Угол aп в соответствии с принятым положительным направлением определится как
aП = – (p + hП – eП – g1 – g2), (1.73)
где тригонометрические функции углов g1 и g2 определяются по формулам:
sing1 = D3 / 2LT fП, cos g1 = D4 / 2 LT fП,sin g2 = lТ sin(jc + ec +
+hП) / LT, cos g2 = [dП + lТ cos (jc + ec + hП)] / LT,(1.74)
 . (1.75)
. (1.75)
Продифференцировав по времени зависимость (1.73), получим для uПвыражение вида
 , (1.76)
, (1.76)
где LT и D3определяются по формулам (1.72) и (1.75).
Дифференцируя выражение (1.69), найдем момент МПР, приведенный к оси качания стрелы по выражению вида
MПР = GП lП uП сos aП,(1.77)
где aПопределяется по формуле (1.73). Используя выражения (1.74), окончательно получим:
 (1.78)
(1.78)
Стреловой неуравновешенный момент МН = МСТР + МПР.
Недостаток рассмотренной схемы уравновешивания – трудность обеспечения ограниченного заднего габарита поворотной части, что часто приводит к весьма сложным формам противовеса.
АО «Подъемтрансмаш» совместно с кафедрой ТТС (ранее ПТСМ) СПбГПУ для новой серии портальных кранов разработало уравновешивающее устройство с противовесом на качающемся рычаге с расположением под поворотной платформой (см. рис. 1.49). Это позволяет (при некотором увеличении массы стрелы) снять многие компоновочные ограничения, понизить общий центр тяжести крана.
Рассмотрим определение момента противовеса МПР для этой схемы.
Расстояние LТ в соответствии со схемой на рис. 1.49 найдем в виде
 (1.79)
(1.79)
В соответствии с принятым положительным направлением
aП = p + hП – eП – g1 – g2. (1.80)
Тригонометрические функции вспомогательных углов g1 и g2 определяются по формулам (1.74) подстановкой величин lТ и hП со знаком минус.
Продифференцировав по времени соотношение (1.80), найдем КПФ первого порядка uПпо формуле
 ,
,
где D3 определяется по выражению (1.75), LТ — по (1.79).
Потенциальная энергия сил тяжести противовеса (см. рис. 1.49) определяется по формуле
ПП = GП (dП sin hП + lП sin aП). (1.81)
Момент от веса противовеса MПР, приведенный к оси качания стрелы, определяется по формуле MПР = – ¶ПП / ¶jС = – GП lП uП cos aП, где aП определяется по выражению (1.80).
После преобразований получим
 (1.82)
(1.82)
где LТ, D3, D4 и uП определяются соответственно по формулам (1.79), (1.75), (1.81).
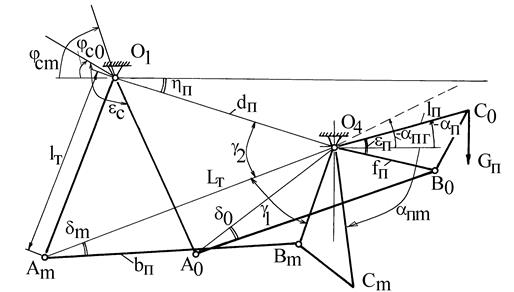 Рис. 1.49. Схема уравновешивающего устройства с противовесом на качающемся рычаге с расположением под поворотной платформой
Рис. 1.49. Схема уравновешивающего устройства с противовесом на качающемся рычаге с расположением под поворотной платформой
|
Выражения (1.76) и (1.77) для uП и МПР при верхнем расположении уравновешивающего устройства (рис.1.49,а) можно записать в виде:
 (1.83)
(1.83)
 (1.84)
(1.84)
где LТ, D3, D4 определяются по формулам (1.72) и (1.75). Формулы для определения uПиМПРпри расположении уравновешивающего устройства под поворотной платформой (рис.1.49) получаются из (1.83) и (1.84) заменой знаков перед lT, hП, eП (во всех выражениях, включая (1.72), Е1, Е2 на противоположные.
Схемы уравновешивающих устройств с подвижным противовесом (постоянного веса и складывающимся), движущимся поступательно, приведены в литературе [5, 15].
Дата добавления: 2015-02-19; просмотров: 2501;