За способом розмикання розрізняють системи з посекційним і груповим розмиканням. 1 страница
Посекційне розмикання забезпечує більшу пропускну спроможність станції, але має складніші схемні рішення.
Конструктивно всі релейні централізації можливо підрозділити на системи зі стативним та блочним монтажем. При стативному монтажі всі з'єднання виконуються на стативі.
Блочний монтаж - це набір типових блоків, які тільки з'єднуються між собою на стативі. Більша частина схемних рішень виконується у блоках.
Переваги блочного монтажу:
•індустріалізація проектування та виготовлення більшої частинисхемЕЦ;
• підвищення надійності роботи за рахунок зменшення числа рознімань;
• прискорення пошуку і усунення ушкоджень (пошук ведеться «до блоку»);
• підвищення культури праці технічного персоналу.
Недоліки блочного монтажу;
• деяка надмірність реле у блоках, особливо при проектуванні малих станцій;
•схеми у блоках важко коректуються в разі необхідності.
Елементна база систем централізації магістрального та промислового залізничного транспорту України виконана на релейній базі. У схемах, що забезпечують вимоги безпеки, встановлено релепершого класу надійності типів НР, НШ, НМШ, РЕЛ. Схеми набірної групи виконуються на реле другого класу надійності.
21.2.3. Виконавчі пристрої управління і контролю ЕЦ
Стрілочні електроприводи. Стрілочний привод (СП) – це пристрій для переводу вістряків стрілки, замикання їх у крайніх положеннях і контролю положення централізованих стрілок. Він є частиною стрілки й повинен відповідати наступним вимогам:
забезпечувати у крайньому положенні стрілки щільне прилягання притиснутого гостряка до рамної рейки;
не допускати замикання стрілки при зазорі між притиснутим вістряком і рамною рейкою 4 мм і більше;
відводити другий гостряк від рамної рейки на відстань не менше 125 мм. Це строго фіксований робочий хід вістряків, що забезпечує прохід коліс рухомого складу без удару в вістряк.
При проходженні по стрілці рухомих одиниць на її вістряки впливають вертикальні та горизонтальні сили й, крім того, виникає тряска, вібрація та інше. У цих умовах може відбуватися відхід притиснутого вістряка від рамної рейки і, як наслідок, влучення гребенів коліс вагонів у простір між притиснутим вістряком і рамною рейкою, що веде до аварії. Тому надійне запирання вістряків і, особливо притиснутого, є важливою вимогою до стрілочних приводів.
Умовно розрізняють три положення стрілки: плюсове крайнє, середнє й мінусове крайнє. Середнім називається таке положення стрілки, при якому притиснутий вістряк відходить від рамної рейки на 4 мм і більше.
Найважливішою умовою дистанційного керування стрілками є наявність контролю їхнього положення на пості керування. Тому стрілочні приводи повинні мати датчик контролю (автоперемикач), що забезпечує контроль положень стрілки й перетворити інформацію про це в електричну величину для дистанційної передачі її в орган керування. Датчик повинен видавати відповідну інформацію як при переміщенні вістряків електроприводом, так і гребенями коліс рухомого складу, тобто при взрізі стрілки.
У процесі експлуатації стрілок можливо попадання снігу або сторонніх предметів між вістряком і рамною рейкою, що перешкоджає нормальному переведенню. Тому привод повинен мати захист від ушкоджень при заклинюванні стрілки у середньому положенні, а також автоматичне реверсування вістряків із середнього положення.
Стрілочні приводи, крім силового, повинні допускати переведення стрілки вручну. При цьому, а також при розкритті приводу повинно автоматично відключатися живлення, щоб уникнути нещасних випадків.
У світовій практиці мають місце багато різноманітних конструкцій приводів для стрілок. Характерним є те, що більшість експертів вказують на відсутність конструкції, яку б умовно можна було назвати еталоном. Приводи відрізняються способом замикання, споживаною енергією, датчиками контролю вістряків та іншими параметрами.
Стрілочні приводи класифікують:
1) за видом споживаної енергії;
2) за часом переведення стрілки;
3) за видом замикання стрілки;
4) за способом сприйняття взрізу стрілки;
5) за видом комутації робочих і контрольних кіл, виробленої
безпосередньо в механізмі привода.
На залізничному транспорті в системах ЕЦ найбільше поширеними є електромеханічні стрілочні приводи засновані на принципі перетворення електричної енергії в механічну за допомогою електродвигунів постійного або змінного струму. Для всіх типів електромеханічних приводів характерне використання електричної енергії як для переведення, так і для контролю положення стрілок. Час переведення складає 2 – 5 с.
Механічну фіксацію вістряків стрілки у крайньому положенні забезпечує замикаючий механізм. За видом замикання розрізняють стрілочні приводи із внутрішнім і зовнішнім замиканням. При внутрішньому замиканні його механізм конструктивно виконується у середині приводу, при зовнішньому – на стрілці.
За способом сприйняття взрізу стрілки стрілочні приводи розрізняють на взрізні та невзрізні.
Взріз стрілки відбувається при її примусовому переведенні ребордами коліс поїзда при пошерстному русі, коли положення стрілки не відповідає напрямку руху.
У невзрізних стрілочних електроприводів типу СП обоє вістряки замкнуті внутрішнім замикачем, тому взріз стрілки викликає його руйнування і утрату контролю на апараті керування. У стрілці, яка обладнана взрізним стрілочним електроприводом типу СПВ замкнутий тільки притиснутий вістряк, тому при взрізі стрілки тільки порушується управління стрілкою з поста і втрачається контроль її положення. Взрізні стрілочні електроприводи мають складну конструкцію і меншу надійність в експлуатації порівнянні з електроприводами типу СП.
За видом комутації робочих і контрольних кіл, встановлених безпосередньо в механізмі привода, розрізняють контактні й безконтактні стрілочні приводи.
Згідно з вимогами ПТЕ стрілочний привід повинен забезпечувати перевід вістряків стрілки та механічне їх замикання у крайньому положенні. Очевидно, для переміщення вістряків потрібен двигун та пристрої, які б забезпечували перетворювання обертального руху на зворотньо-поступальний, зменшували обертання і відповідно збільшували обертальний момент.
Також потрібно жорстко фіксувати вістряки у крайніх положеннях, щоб вони не змінювали свого стану відносно рамних рейок під час руху потяга.
Функціональна структура електропривода подана на рис. 21.2.2.

Рис. 21.2.2. Функціональна структура електропривода
Управляючий пристрій УП видає енергетичний сигнал для двигуна і приймає інформаційний сигнал від засобів контролю.
Енергія для роботи двигуна Д надається через автоперемикач АП. Перетворювання обертального руху здійснюється передаточним механізмом, який має редуктори Р1 і Р2 та фрикційний пристрій Ф.
Фрикційний пристрій дозволяє захищати двигун від ушкоджень і перевантажень, а також за його допомогою можна здійснювати регулювання обертаючого моменту, який передається редукторам Р1 і Р2. Для механічної фіксації вістряків стрілки С у крайніх положеннях застосовується замикаючий механізм ЗМ. Автоперемикач механічно пов’язаний з вістряками і передаточним механізмом, за рахунок цього контроль положення стрілки можливий лише при виконанні двох умов:
· роботи передатного механізму з переводу стрілки;
· фактичного пересування вістряків на задану відстань.
Якщо вказані події матимуть місце, то стає можливим формування контрольного сигналу для пристроїв управління. Коли хоча б одна з цих подій не буде виконана, АП перестає подавати сигнали контролю, що сприймається схемою управління, як його втрата.
Електропривід типу СП (рис. 21.2..3) має металевий корпусі 1, в якому розташовано електродвигун 2, редуктор 3 з фрикціоном 4, автоперемикач 5, шибер 8 і контрольні лінійки 9 і 10. Від редуктора вал електродвигуна приводить в обертання через зубчасту пару головний вал 6 з робочою шестернею 7, яка переміщає шибер 8. При переміщенні шиберу здійснюється переведення стрілки.
Наприкінці ходу шибера й замикання стрілки, що перемістила контрольні лінійки 9 і 10 у відповідне положення, замкнуться контрольні контакти автоперемикача, які утворюють електричне коло контролю положення стрілки.
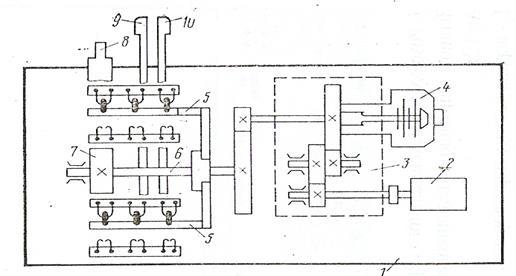
Рис. 21.2.3. Стрілочний електропривід типу СП
Управління стрілками ведеться з допомогою кнопок і стрілочних рукояток на пульті управління і контролю.
У більшості систем ЕЦ схеми управління стрілочними приводами виконані у вигляді конструктивно завершених вузлів.Всі ці схеми мають три кола, які існують у часі послідовно:

Управляюче коло,іноді його називають пусковим, призначене для ввімкнення робочого кола з перевіркою необхідних умов безпеки.
Залежно від умов експлуатації управляюче коло повинно забезпечувати:
· контроль часу переводу стрілки (робота на фрикцію);
· автоматичне повернення;
· повторний перевід.
Ушкодження будь-якого елементу кола не повинно приводити до відмови у схемі ЕЦ.
Робоче колопризначено для підключення електродвигуна стрілочного приводу до джерела живлення.
Робоче коло забезпечує:
· доведення стрілки, якщо почався її перевід;
· контроль протікання робочого струму;
· подвійне управління стрілкою;
· послідовний перевід спарених стрілок;
· автоматичне вимкнення струму у кінці переводу.
Вимкнення робочого кола у кінці переводу здійснюється контактами автоперемикача або іншим комутуючим елементом, якщо датчик безконтактний.
Контрольне колопризначено для контролю крайніх та середнього положень стрілки. Це одна з найбільш відповідальних схем ЕЦ.
Контрольне коло схеми управління стрілочним переводом забезпечує безперервний контроль усіх елементів контрольного кола, що досягається за рахунок обтікання струмом. При ушкодженні усякого елемента видається сигнал втрати контролю.
При знаходженні стрілки у середньому положенні всі пристрої контрольного кола відключаються від джерел живлення
До контрольного кола належать: джерело живлення, датчик положення стрілки і контрольні реле (плюсового і мінусового контролю).
Станційні світлофори. Ці світлофори призначені для регулювання руху поїздів і маневрової роботи на станції. Нормальне положення – закрите, станція повинна бути відгалужена від перегону, крім того такий стан відповідає ПТЕ. Для їх відкриття необхідно виконати деяку послідовність дій. Це обумовлено тим, що у початковому положенні схеми управління ЕЦ налаштовані на наступну ситуацію: всі дільниці вільні, маршрути не встановлені і всі світлофори закриті.
Закритий стан вхідного світлофора упереджує в’їзд поїзда з перегону на непідготовлений маршрут, а червоний вогонь на вихідному світлофорі забороняє відправлення поїзда зі станції по непідготовленому маршруту. Для маневрового світлофора закритий стан позначається синім вогнем. Це обумовлено тим, що у поїзному маршруті машиніст проїжджає закриті маневрові сигнали попутного напрямку, а якщо вони будуть сигналізувати червоним, то проїзд буде заборонено, бо червоне світло має абсолютне значення.
Станційні світлофори – це пристрої напівавтоматичної дії. На відміну від перегінних світлофорів, вони відкриваються вручну при установленні маршруту, а перекриваються автоматично. Алгоритм реалізації напівавтоматичного режиму роботи станційних світлофорів в ЕЦ виключає автоматичне повторне відкриття сигналу після проходу поїзду. Після проходу поїзда усі умови безпеки знову поновлюються.
При вступі рухомого складу на підготовлений маршрут поїзний і маневровий сигнали працюють по-різному: світлофор у поїзному маршруті перекривається після зайняття поїздом першої за сигналом дільниці, а маневровий – тільки після вивільнення дільниці наближення, а при її зайнятості – першої секції за світлофором. Такий порядок роботи обумовлений тим, що маневрові пересування можуть виконуватися вагонами наперед, а машиніст, що знаходиться у кінці рухомого складу, не повинен бачити червоного вогню до проїзду сигналу.
Сигналізація поїзних світлофорів залежить від встановленого маршруту і стану наступного світлофора. Для вхідного це вихідний, або маршрутний, а для вихідного треба брати до уваги і систему автоблокування на перегоні.
Схеми вмикання ламп світлофорів є дуже відповідальними з точки зору забезпечення безпеки руху поїздів. Вони повинні контролювати умови безпеки, комутувати кола ламп, контролювати цілісність розжарення їх ниток і у разі необхідності змінювати сигнальні показання світлофора.
На рис. 21.2.4. наведена функціональна схема управління вхідним світлофором. Після маніпуляцій ДСП на апараті управління схемою електричної централізації формується команда на відкриття світлофора. Конкретизація команди відбувається при виборі сигнальних показань. Це окрема група реле, які збуджуються залежно від встановленого маршруту і сигнального показання наступного світлофора. Контактами цих реле забезпечується ввімкнення на світлофорі відповідного показання. Окремим вузлом здійснюється контроль горіння фактичного горіння кожної лампи. Це необхідно для того, щоб пересвідчитись, що лампа дійсно горить.
Управляюча

|
|
|
|
 |  |  | |||||
 | |||||||
Зворотній зв’язок
 |  | ||||
 | |||||
Рис. 21.2.4. Функціональна схема управління світлофором
За допомогою цього зворотного зв’язку здійснюється і принцип протиповторювальності роботи світлофора. Після закриття сигналу порушується дія зворотного зв’язку, і тому для його повторного відкриття необхідно подати у схему новий управляючий сигнал.
За рахунок зворотного зв’язку можливо коректувати роботу схеми при ушкодженнях, забезпечуючи перехід на більш забороняюче показання, наприклад, при ушкодженні лампи зеленого вогню можливо ввімкнути жовте показання. Такі зміни сигнальних показань можливі тільки за умови незмінності маршруту: зелений вогонь не може бути змінений на два жовтих, бо це потребує встановлення іншого маршруту.
Рейкові кола. У станційних системах централізації рейкові кола дозволяють:
· забезпечувати інформацію на табло про стан приймально-відправних колій і стрілочних секцій;
· виключати переведення централізованих стрілок під рухомим складом;
· забезпечувати автоматичне розмикання стрілок при проходженні поїзда по маршруту;
· автоматично перемикати сигнальні показання станційних світлофорів з дозволяючого сигнала на заборонне під дією рухомого складу;
· передавати інформацію з колій на локомотив під час руху поїзда;
· забезпечувати постійний контроль цілісності рейок.
Станційні рейкові кола через специфічні особливості роботи станцій та складності їх колійного розвитку відрізняються від перегінних схемами включення колійних приймачів, великою нестабільністю параметрів рейкової лінії, наявністю розгалужень на стрілочних ділянках, незначною довжиною у межах стрілочних та безстрілочних ділянок та ін.
До станційних рейкових кіл висуваються такі вимоги, які обумовлені специфічними умовами їх експлуатації:
·безвідмовність дії у реально існуючому діапазоні зміни провідності ізоляції рейкової лінії;
·висока надійність захисту колійних приймачів від перешкод тягового струму та інших джерел;
·прискорена реакція кола на вплив поїзного шунта;
·економічність як по витратах на обладнання, так й експлуатаційних.
Залежно від конфігурації рейкові кола можуть бути нерозгалуженими й розгалуженими. Нерозгалуженими РК обладнуються приймально-відправні колії, безстрілочні ділянки і тупики, а розгалуженими – стрілочні секції. У розгалужено-рейкове коло допускається включення не більше трьох поодиноких або двох спарених стрілок. Як правило, всі розгалуження для виконання вимог контрольного режиму треба установлювати додаткові рейкові з’єднувачі або реле на кожному розгалуженні.
Знаходячись на приймальному кінці кожного розгалуження рейкового кола, додаткове реле не тільки фіксує вступ рухомої одиниці, а й безперервно контролює справність всіх складових кола та протікання сигнального струму. Але обладнання рейковими колами дільниць станцій досить дорого коштує, тому в окремих випадках дозволяється реле не встановлювати. Це:
·місця, де здійснюється тільки маневрова робота;
·парки відправлення вантажних потягів;
·розгалуження довжиною менш ніж 60 м.
На рис. 21.2.5 наведений приклад побудови розгалуженого рейкового кола з трьома стрілками і трьома колійними реле. При знеструмленні будь-якого реле загальне реле 1-5 СП також знеструмується, що означає зайнятість стрілочної секції.

3П
Стр.5
2П
Стр.1
° стр.3
+ - 1П
≤ 60 м
1П 2П 3П 1-5 СП
П М
Рис. 21.2.5. Спрощена схема розгалуженого рейкового кола
21.2.4. Загальні принципи побудови і роботи маршрутно-релейної централізації
На залізницях України і СНД на дільничних, сортувальних і проміжних станціях із числом стрілок понад 30 і значним обсягом поїзної і маневрової роботи найбільш поширеною є блочна маршрутно-релейна електрична централізація стрілок і сигналів (БМРЦ).
Уся апаратура БМРЦ розташована в функціональних блоках, котрі у вигляді типових конструкцій з закінченим монтажем виготовляються на заводах. Схеми БМРЦ для станцій з будь-яким числом стрілок і світлофорів збираються шляхом з’єднання набірних і виконавчих блоків відповідно до топології однониткового плану станції. Блочне побудування електричної централізації дозволяє спростити проектування пристроїв, скоротити час монтажних робіт, поліпшити ремонтну-придатність у процесі експлуатації діючих приладів.
Аппаратура БМРЦ і електрообладнання для живлення пристроїв ЕЦ розташована, як правило, у спеціальної будівлі (пост ЕЦ). Основними приміщеннями поста ЕЦ є апаратна, релейна, акумуляторна, кімната зв’язку та інші.
В апаратному приміщенні за пультом управління працює черговий по станції (ДСП). Апаратом управління може бути пульт-маніпулятор і виносне табло або пульт-табло.
В БМРЦ застосовується маршрутний принцип управління стрілками і сигналами, за яким маршрут будь-якої складності і довжини здійснюється послідовним натисненням на пульті кнопок початку і кінця маршруту. При цьому здійснюється автоматичний перевід і замикання стрілок, які входять до складу маршруту, і відкривається відповідний світлофор з перевіркою усіх умов безпеки руху.
Роботу маршрутно-релейної централізації можна розділити на наступні частини (рис. 21.2.6): маршрутний набір; скасування набору; роздільне управління стрілками; установка, контроль, замикання маршруту і відкриття світлофора; автоматичне секційне розмикання маршруту; скасування встановленого маршруту; штучне розмикання маршруту.
Маршрутний набір ДСП виробляє натисканням маршрутних кнопок за принципом початку і кінця маршруту і впливає на набірну групу. Набірна група автоматично переводить стрілки по всіх секціях маршруту і перевіряє відповідність маршруту, що сформувався, маршруту, який набирався.
У всіх випадках помилкового натискання маршрутних кнопок або відмови авоматикі ДСП скасовує набір шляхом натиснення спеціальної кнопки “Скасування набору”. Установка, контроль, замикання маршруту і відкриття світлофора відбувається автоматично, без участі ДСП, за допомогою схем виконавчої групи.
По закінченню переведення стрілок по всіх секціях маршруту контролюється правильність положення стрілок і відсутність їх взрізу; вільність секцій; вільність приймальної колії (в маршруті прийому), вільність не менше однієї блок-ділянки на перегоні при автоблокування або всього перегону при напівавтоматичному блокуванні; відсутність ворожих маршрутів, штучного розмикання маршруту і передачі стрілок на місцеве управління.
Одночасно з контролем правильності приготованого маршруту настає
Рис. 21.2.6. ЕЦ (альбом)
замикання всіх секцій маршруту, і після замикання відкривається світлофор для дозволу руху по маршруту. Характер замикання може бути попереднім або повним.
Автоматичне розмикання маршруту будується таким чином, що розмикання складного маршруту відбувається по частинам, окремим секціях. Вступ поїзда на маршрут фіксується за допомогою першої по ходу поїзда рейкового кола і відбувається автоматичне закриття світлофора. При подальшому русі поїзда по секціях маршруту ці секції розмикаються в послідовності проходження по ним поїзду.
Кожна наступна секція маршруту розмикається за умови розмикання попередньої секції, тобто секція 2 за умови розмикання секції 1, секція 3 за умови розмикання секції 2. З моменту розмикання кожної секції маршруту ДСП отримує можливість, не чекаючи звільнення і розмикання останньої секції, використовувати її в іншому маршруті.
Скасування маршруту ДСП проводиться в тих випадках, коли не представляється можливим використовувати встановлений маршрут, з витримкою часу, яка залежить від стану ділянки наближення.
До режиму штучної розмикання маршруту вдаються у разі, якщо після проходження поїзда за маршрутом з якої-небудь причини не розімкнуться окремі секції (наприклад, при пошкодженні рейкового кола). Штучна оброблення відбувається також з витримкою часу.
21.2.5. Мікропроцесорні централізації стрілок і сигналів
Існуючі системи релейного централізації розроблялися в 1960 - 1980 роках і до цього часу вважаються морально застарілими. Реле як елементна база електричної централізації практично себе вичерпали. Спроби отримання нових якісних показників і розширення функцій релейного централізації ведуть до збільшення числа реле, споживаної електроенергії, витрат на технічне обслуговування, обсягів проектних і монтажних робіт. Тому доцільно використовувати як технічного засобу автоматизації технологічних процесів управління рухом поїздів на станціях мікропроцесорну централізацію (МПЦ), успішно експлуатовану на закордонних залізницях.
Перехід від релейного централізації до мікропроцесорної не є даниною моді. Це – об’єктивна необхідність оновлення всього технологічного процесу управління перевезеннями та роботою структурних підрозділів залізничного транспорту на основі застосування інформаційних технологій. Тут відразу проявляються переваги МПЦ, яка служить зручним сполучною ланкою між джерелом отримання первинної інформації (рухомий склад, об’єкти СЦБ тощо) і системами управління перевізним процесом вищого рівня, дозволяючи обійтися без додаткових надбудов, які були б потрібні при використанні електричної централізації на базі реле.
Розглянемо один із варіантів побудови мікропроцесорної централізації на прикладі МПЦ, створеної шведською фірмою Ericsson. Система має трирівневу ієрархічну структуру (рис. 21.2.7). На верхньому рівні є основна О і резервна Р ЕОМ для керування введенням команд і даних, а також їх відображення. Другий рівень містить основний і резервний обчислювальні комплекси ВК, що виконують функції централізації. На нижньому рівні розташовані концентратори К, які через пристрої передачі даних УПД і пристрою сполучення УСО пов’язують ВК і підлогові об’єкти.
Для забезпечення безпечного та надійного функціонування системи використовуються наступні прийоми. Кожен ВК складається з двох незалежних обчислювальних каналів, в яких інформація кодується і обробляється по-різному. Проміжні дані і кінцеві результати реалізації алгоритмів порівнюються за допомогою апаратних засобів. Програми, використовувані в кожному з каналів, різні, їх розробляли різні групи програмістів. Процес роботи системи будується за циклічним принципом (час циклу 0,6 с). Протягом кожного циклу обчислювальний канал піддається тестуванню. При виявленні помилок пристрій перемикання УП відключає несправний ВК і включає резервний. Апаратура централізації розміщується в шафах.



 РК
РК

Рис. 21.7. Структурна схема МПЦ системи JZN-850
21.2.6. Характеристика існуючих систем мікропроцесорної централізації
На сьогоднішній день розроблено багато систем електричної централізації побудованих на мікропроцесорах, таких наприклад як: «МПЦ-І», «МПЦ-2», «МПЦ-МПК», «ДІАЛОГ-Ц» , «Ebilock -950 » та ін. Розглянемо декілька систем і зробимо також їх аналіз, а також виберемо ту систему котра найбільш ефективна та підходить до модернізації нашої станції.
МПЦ-І вдало поєднує в собі ряд важливих споживчих якостей. По-перше, вона розроблена у відповідності з російськими вимогами безпеки, які не поступаються вимогам CЕNELEC рівня SIL4. По-друге, є однією з найбільш компактних і енергетично ефективних МПЦ. По-третє, володіє розвиненими комунікаційними засобами і гнучкою архітектурою, що дозволяє інтегрувати в МПЦ суміжні системи залізничної автоматики, використовувати сучасні мережі передачі даних і створювати економічно виправдані конфігурації системи для станцій різних класів. І нарешті, закладені в МПЦ-І схемні, програмні та конструктивні рішення дозволили мінімізувати як вартість впровадження, так і експлуатаційні витрати. У результаті система МПЦ-І економічно ефективна не тільки на магістральних залізницях, а й на під'їзних коліях промислових підприємств. Різні рівні МПЦ-І включають в себе:
- керуючий контролер централізації (УКЦ) з програмою логіки центральних залежностей для здійснення маршрутизованих пересувань по станції;
- автоматизоване робоче місце чергового по станції (АРМ ДСП) для завдання керуючих команд і візуалізації поїзної ситуації;
- автоматизоване робоче місце електромеханіка (АРМ ШНЦ) для забезпечення можливості дистанційного моніторингу стану об'єктів МПЦ-І;
- пульт резервного управління для прямопроводного управління стрілками при виникненні несправностей АРМ ДСП або УКЦ;
- апаратура контролю вільності / зайнятості ділянок шляху, схеми управління стрілками, світлофорами.
Дата добавления: 2015-02-16; просмотров: 3442;