Механизм
Ведущие и ведомые звенья. Механизм является кинематической цепью, отличающейся определенностью движения всех звеньев относительно неподвижного звена—стойки. Звенья, на которые действуют движущие силы, называются ведущими, остальные — ведомыми. Следовательно, механизмом называется кинематическая цепь, у которой при заданном движении одного или нескольких звеньев относительно звена, принятого за стойку, остальные звенья совершают вполне определенные движения.
При кинематическом исследовании механизмов иногда удобнее движение задавать не ведущим звеньям, на которые действуют движущие силы, а другим. В этом случае такие звенья называются входными; последнее звено в кинематической цепи, движение которого является производным от положения входного звена, называется выходным. Степень подвижности. Количество ведущих звеньев соответствует степени подвижности механизма W, т. е. степени свободы его относительно стойки. Если число подвижных звеньев плоского механизма га, число кинематических пар пятого класса — р5, четвертого класса — p4 то число возможных движений несоединенных в пары звеньев будет Зn, число условий связи, налагаемых парами пятого класса,— 2р5, парами четвертого класса — р4 и, следовательно, степень подвижности механизма
 . (1.2)
. (1.2)
Формула (1.2) получила название формулы Чебышева (по имени математика, впервые получившего ее в 1869 г.).
В тех случаях, когда рассматривают подвижность пространственного механизма, пользуются формулой Сомова — Малышева
W =  ,
,
где р1, р2, р3 — число пар первого, второго, третьего классов.
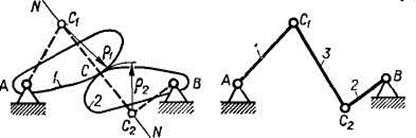 Замена пар четвертого класса. Распространенные методы изучения структуры механизмов разработаны для механизмов, в состав которых входят только низшие пары, поэтому при структурном анализе высшие пары (пары четвертого класса) условно заменяют кинематическими цепями, содержащими лишь пары пятого класса. Заменяющие цепи, естественно, должны быть структурно и кинематически эквивалентны заменяемым парам. Простейшая заменяющая цепь (рис. 1.5) будет состоять из одного звена 3, расположенного на нормали NN к профилям звеньев 1 и 2, образующих высшую кинематическую пару С. Длина звена 3 равна сумме радиусов кривизны р1 и р2. Это звено образует пары пятого класса С1 и С2 со звеньями 1 и 2.
Замена пар четвертого класса. Распространенные методы изучения структуры механизмов разработаны для механизмов, в состав которых входят только низшие пары, поэтому при структурном анализе высшие пары (пары четвертого класса) условно заменяют кинематическими цепями, содержащими лишь пары пятого класса. Заменяющие цепи, естественно, должны быть структурно и кинематически эквивалентны заменяемым парам. Простейшая заменяющая цепь (рис. 1.5) будет состоять из одного звена 3, расположенного на нормали NN к профилям звеньев 1 и 2, образующих высшую кинематическую пару С. Длина звена 3 равна сумме радиусов кривизны р1 и р2. Это звено образует пары пятого класса С1 и С2 со звеньями 1 и 2.
Рис. 1.5 Замена высшей пары на цепь с низшими
Пассивные связи и лишние степени свободы.В формуле (1.2) не отражены размеры звеньев. Специальным подбором размеров некоторых звеньев можно получить фактическую степень подвижности, отличающуюся от подсчитываемой по формуле (1.2). Например, в механизме, показанном на рис. 1.6, а, при наличии звена EF степень подвижности W =  , но если принять дополнительное условие, касающееся размеров звеньев, а именно АВ = = || CD = | EF (рис. 1.6, б), то, несмотря на то, что по подсчету по-прежнему
, но если принять дополнительное условие, касающееся размеров звеньев, а именно АВ = = || CD = | EF (рис. 1.6, б), то, несмотря на то, что по подсчету по-прежнему
W = 0, фактически степень подвижности W = 1 и механизм будет работать. При этих условиях звено EF можно исключить и степень подвижности не изменится. Такие звенья, наличие которых не влияет на подвижность механизма, налагают пассивные или избыточные условия связи и называются пассивными. В механизмы они вводятся < для увеличения жесткости, лучшего распределения нагрузки, создания определенности направления движения и т. д. Введение пассивных звеньев требует высокой точности выполнения элементов кинематических пар.
В механизме, изображенном на рис. 1.6, в, W =  . Вторую подвижность вносит звено 3 — некруглый ролик Если ролик сделать круглым (рис. 1.6, г), то характер относительного движения коромысла 2 будет таким же, как и в том случае,
. Вторую подвижность вносит звено 3 — некруглый ролик Если ролик сделать круглым (рис. 1.6, г), то характер относительного движения коромысла 2 будет таким же, как и в том случае, 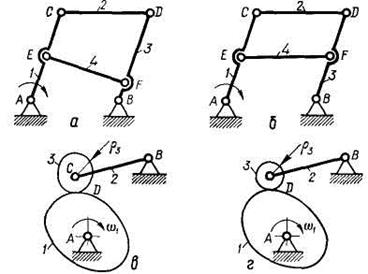 если ролик сделать неподвижным. В этом смысле степень свободы, вносимая роликом, является «лишней». При закрепленном ролике п = 2; р5 = 2;p4=l;W = 3*2-
если ролик сделать неподвижным. В этом смысле степень свободы, вносимая роликом, является «лишней». При закрепленном ролике п = 2; р5 = 2;p4=l;W = 3*2-
-2*2-1 = 1
Чаще всего звенья, создающие лишние степени свободы, вводят в механизм для улучшения условий работы, повышения КПД (замена скольжения качением) и т. д. При структурном анализе пассивные звенья и лишние степени свободы условно исключают.
Рис. 1.6. Шарнирные и кулачковые механизмы
Дата добавления: 2015-02-05; просмотров: 998;