Основы теории механизмов
В процессе эксплуатации устройств судовых электроэнергетических систем обслуживающий персонал постоянно сталкивается с опасными факторами. Воздействие опасных факторов может нанести существенный вред жизни и здоровью людей, а также привести к неблагоприятным последствиям, связанным с порчей оборудования и причинению ущерба в больших масштабах.
Для возможного исключения или уменьшения влияния опасных факторов при обслуживании электрооборудования электроэнергетических систем предусматриваются специальные мероприятия.
Воздействие тока на организм человека по характеру и последствиям поражения зависит от следующих факторов:
- величины тока;
- длительности воздействия тока;
- частоты и рода тока;
- приложенного напряжения;
- сопротивления тела человека;
- пути прохождения тока через тело человека;
- состояния здоровья человека;
- фактора внимания.
Исход поражения электрическим током в целом определяется количеством “поглощенной” организмом энергии протекания электротока. Оказывается, что ток в теле человека проходит не обязательно по кратчайшему пути. Наиболее опасным является прохождение тока через дыхательные органы и сердце по продольной оси (от головы к ногам).
Часть общего тока, проходящего через сердце:
- путь рука – рука – 3,3% общего тока;
- путь левая рука – ноги – 3,7% общего тока;
- путь правая рука – ноги – 6,7% общего тока;
- путь нога – нога – 0,4% общего тока.
Исход поражения при воздействии электрического тока зависит от психического и физического состояния человека.
При заболеваниях сердца, щитовидной железы и т.п. человек подвергается более сильному поражению при меньших значениях тока, т.к. в этом случае уменьшается электрическое сопротивление тела человека и уменьшается общая сопротивляемость организма внешним раздражителям. Отмечено, например, что для женщин пороговые значения токов примерно в 1,5 раза ниже, чем для мужчин. Это объясняется более тонкой кожей женщин.
При применении спиртных напитков сопротивление тела человека падает, уменьшается сопротивляемость организма человека и внимание. Исход поражения становится все более серьезным.
При собранном внимании сопротивление организма повышается и вероятность поражения несколько снижается.
Средства индивидуальной защиты от поражения электрическим током разделяют на основные и дополнительные. К основным средствам защиты относят: при напряжении сети более 1000 В — изолирующие измерительные штанги и клещи, указатели напряжения, изолирующие устройства, оборудование и приспособления в виде лестниц, площадок, захватов; при напряжении сети до 1000 В — инструменты с изолирующими ручками, диэлектрические перчатки, указатели напряжения, изолирующие клещи, трапы, кронштейн-площадки. Дополнительными средствами защиты являются диэлектрические сапоги и галоши, изолирующие подставки, диэлектрические монтерские когти с ремнями,, диэлектрические коврики и дорожки, монтажные пояса (для работы на высоте), страхующие канаты, лестницы-стремянки и приставные лестницы.
Исправность защитных средств необходимо проверять, осматривая их перед каждым применением, а также периодически через 6... 12 месяцев; изолирующие средства необходимо периодически испытывать.
Список литературы.
1. Правила классификации и постройки морских судов.Т.2/Регистр РФ.-М.: Транспорт,1999 г.
2. Роджеро Н.И. Справочник судового электромеханика и электрика.2-е изд. перераб. и доп. – М.: Транспорт,1986 г.
3. Соловьев Н.Н. Судовые электроэнергетические системы. Учебник для речных училищ и техникумов.-М.: Транспорт 1986 г.
4. Лейкин В.С. Судовые электрические станции и сети.: Учебник для мореходных училищ.- 3-е изд., перераб. и доп.-М.: Транспорт 1982г.
5. Константинов В.Н. Системы и устройства автоматизации судовых электроэнергетических установок. Л., Судостроение. 1972 г.
6. Иванов В.И Элементы и схемы судовой электроавтоматики.-М.:Транспорт,1973 г.
7. Правила безопасности труда на судах речного флота. Л.: Транспорт, 1990 г.
Основы теории механизмов
Подвижно соединенные между собой части механизма называются звеньями. В механизме различают неподвижное звено-стойку (станина станка, корпус прибора, шасси и т. п.) и подвижные звенья, которые могут совершать вращательное, поступательное и сложное движение. Звеном может быть одна или несколько жестко связанных между собой деталей.
 В зависимости от характера движения и назначения звенья имеют определенные названия. Например, в механизме шарнирного четырехзвенника (рис. 1.1, а) и его модификациях, являющихся основой многих машин и приборов, звено 1, совершающее полный оборот, называется кривошипом; звено 2, совершающее сложное плоскопараллельное движение,— шатуном; звено 3, совершающее качательное движение,— коромыслом; неподвижное звено 4 является стойкой. На рис. 1.1 штриховыми линиями изображены крайние положения механизма.
В зависимости от характера движения и назначения звенья имеют определенные названия. Например, в механизме шарнирного четырехзвенника (рис. 1.1, а) и его модификациях, являющихся основой многих машин и приборов, звено 1, совершающее полный оборот, называется кривошипом; звено 2, совершающее сложное плоскопараллельное движение,— шатуном; звено 3, совершающее качательное движение,— коромыслом; неподвижное звено 4 является стойкой. На рис. 1.1 штриховыми линиями изображены крайние положения механизма.
Модификации шарнирного четырехзвенника образуются в зависимости от относительного расположения вращательно и поступательно движущихся звеньев и их размеров. Если крайнюю вращательную кинематическую пару D заменить на поступательную, то звено 3 (рис. 1.1, а) превращается в ползун, и такой механизм называется кривошипно-ползунным (рис. 1.1, б).
Рис. 1.1 Механизм четырёхзвенника и его модификации
Если в этом механизме стойкой сделать звено 1, то образуется кривошипно-кулисный механизм (рис. 1.1, в), звено 4 становится подвижной направляющей для ползуна 3 и называется кулисой. Кулисные механизмы, в состав которых входят два ползуна, образуют тангенсные (рис. 1.1, г) и синусные (рис. 1.1, д) механизмы.
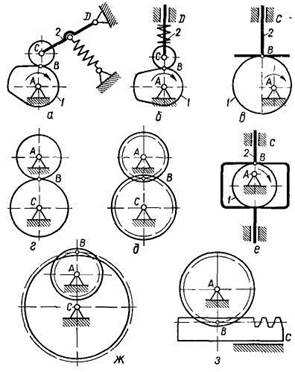
Широкое применение в технике нашли также кулачковые механизмы, отличающиеся большим разнообразием форм кулачков (рис. 1.2, а, б, в, е), фрикционные (рис. 1.2, г) и зубчатые механизмы (рис. 1.2, д, ж, з), типы которых определяются количеством, формой и взаимным расположением звеньев.
 1.1. Кинематические пары и цепи
1.1. Кинематические пары и цепи
Кинематическая пара.Соединение двух звеньев, обеспечивающее определенное относительное движение, образует кинематическую пару. Элементами кинематической пары называются поверхности, линии или точки, по которым происходит подвижное соединение двух звеньев и которые ограничивают относительное движение этих звеньев. В зависимости от вида элементов различают высшие и низшие кинематические пары. В высших кинематических парах элементами являются линии или точки (пара В, рис. 1.2).
Рис.1.2 Механизмы с высшими парами и способ их замыкания
 Кинематические пары, образованные элементами в виде поверхностей, называются низшими (пара А, рис. 1.2). Замыкание кинематических пар может быть геометрическим (рис. 1.2, ё) и силовым (рис. 1.2, а, б), например, с помощью пружин. Условное обозначение кинематических пар установлено ГОСТ 2.770—68.
Кинематические пары, образованные элементами в виде поверхностей, называются низшими (пара А, рис. 1.2). Замыкание кинематических пар может быть геометрическим (рис. 1.2, ё) и силовым (рис. 1.2, а, б), например, с помощью пружин. Условное обозначение кинематических пар установлено ГОСТ 2.770—68.
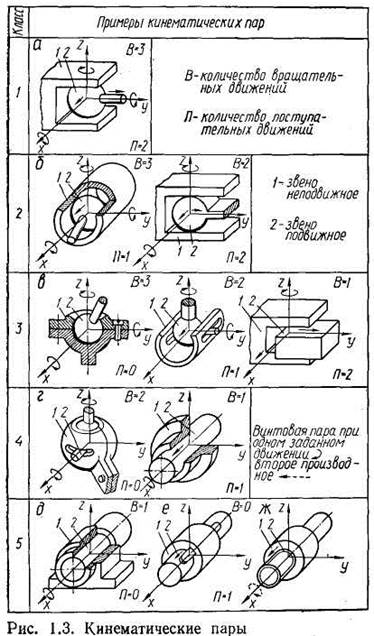
Класс пары.Свободное звено в пространстве обладает шестью степенями свободы. Звено, входящее в кинематическую пару, теряет от одной до пяти степеней свободы. Класс кинематической пары определяется числом условий связи S, налагаемых на относительное движение звеньев. Различают пять классов кинематических пар (рис. 1.3). Если Н — число степеней свободы звеньев кинематической пары, то
S = 6 — H. (1.1)
Например, в парах на рис. 1.3, г конструкции элементов позволяют осуществлять два независимых движения. Для них Н = 2 и S = 4; следовательно, эта пара—четвертого класса. Если же на звене цилиндрической пары установить бурты, препятствующие поступательному движению (рис. 1.3, д), то остается единственное возможное вращательное движение, следовательно, Н = 1 и 5 = 5 — пара пятого класса.
Можно подобрать такую форму элементов пары, чтобы при одном независимом движении возникло второе — производное: в винтовой паре (рис. 1.3, ж) вращательное движение винта вызывает поступательное перемещение его вдоль оси. Такую пару следует отнести к пятому классу, так как имеется всего одно независимое движение (Я = 1).
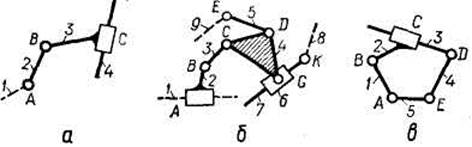 Кинематическая цепь.Звенья, соединенные между собой кинематическими парами, образуют кинематическую цепь. Кинематические цепи могут быть простыми (рис. 1.4, а), сложными, если хотя бы одно звено входит больше чем в две кинематические пары (рис. 1.4, б), замкнутыми (рис. 1.4, в) и незамкнутыми, если есть звенья, входящие в одну кинематическую пару (рис. 1.4, а).
Кинематическая цепь.Звенья, соединенные между собой кинематическими парами, образуют кинематическую цепь. Кинематические цепи могут быть простыми (рис. 1.4, а), сложными, если хотя бы одно звено входит больше чем в две кинематические пары (рис. 1.4, б), замкнутыми (рис. 1.4, в) и незамкнутыми, если есть звенья, входящие в одну кинематическую пару (рис. 1.4, а).
Рис.1.4. Кинематические цепи
Различают пространственные и плоские кинематические цепи. Все звенья плоской кинематической цепи размещаются в параллельных плоскостях и совершают плоскопараллельные движения. Поскольку на звенья плоских цепей налагаются три дополнительных общих условия связи, исключающих движение в других плоскостях, то в плоской цепи могут быть пары только четвертого или пятого класса. Пара четвертого класса в плоской цепи налагает на относительное движение звеньев одно условие, а пара пятого класса — два условия связи. Пары четвертого класса в плоских цепях высшие (см. рис. 1,6 пары F и L), пары пятого класса чаще всего низшие: вращательные (рис. 1.3, д) или поступательные (рис. 1.3, е).
Дата добавления: 2015-02-05; просмотров: 1391;