Кинематический анализ механизмов с низшими парами
2.1. Определение положений и перемещений звеньев
Графический метод. Положение звеньев и траекторий точек определяется на кинематической схеме механизма.
Схема механизма, на которой зафиксировано определенное положение ведущего звена и в связи с ним положения всех остальных звеньев, называется планом положения механизма. При вычерчивании схемы механизма необходимо выбирать масштабы, соответствующие ГОСТ 2.302—88. Так как в дальнейшем при кинематических расчетах используются величины, производные от длины, то масштаб плана механизма должен иметь размерность [м/мм]. Рекомендуемые масштабы: 0,0001; 0,0002; (0,00025); 0,0005; 0,001; 0,002; (0,0025); 0,005; 0,01; 0,02 и т. д.
При вычерчивании плана положений механизма прежде всего нужно нанести положения неподвижных центров вращательных пар и направляющих поступательных пар. Затем для выбранного положения ведущего звена последовательно определяются положения кинематических пар и звеньев групп, присоединенных к ведущему звену.
 Способ засечек. Определение положений перемещающихся кинематических пар осуществляется способом засечек. В этом случае строится геометрическое место возможных положений центров вращательных пар (см. рис. 1.9, а). Из центров крайних кинематических пар (В и D) ближайшей к ведущему звену группы с помощью циркуля проводят дуги радиусами, равными 1вс и Idc, пересечение которых определит положение центра внутренней вращательной пары С. Соединив полученную точку С прямыми линиями с точками В и D, находят положения звеньев ВС и CD. Таким же образом определяются положения центров остальных кинематических пар.
Способ засечек. Определение положений перемещающихся кинематических пар осуществляется способом засечек. В этом случае строится геометрическое место возможных положений центров вращательных пар (см. рис. 1.9, а). Из центров крайних кинематических пар (В и D) ближайшей к ведущему звену группы с помощью циркуля проводят дуги радиусами, равными 1вс и Idc, пересечение которых определит положение центра внутренней вращательной пары С. Соединив полученную точку С прямыми линиями с точками В и D, находят положения звеньев ВС и CD. Таким же образом определяются положения центров остальных кинематических пар.
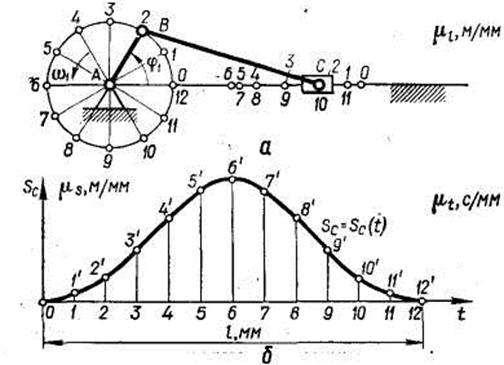
Рис. 2.1. К построению графика перемещений
Если необходимо проследить движение определенной точки на каком-либо звене, следует отметить эту точку на каждом зафиксированном положении звена. Соединяя плавной кривой отмеченные точки, получают траекторию движения.
Метод графиков. Для представления о характере перемещений ведомого звена (рис. 2.1, а) пользуются графиками. На оси абсцисс графика (рис. 2.1, б)
в масштабе  (с/мм) откладывают время одного цикла (в период установившегося движения — это время, по истечении которого положение, скорость и ускорение звеньев механизма приобретают первоначальные значения). При выбранной длине отрезка на оси абсцисс l, соответствующего времени одного цикла, и скорости ведущего звена,
(с/мм) откладывают время одного цикла (в период установившегося движения — это время, по истечении которого положение, скорость и ускорение звеньев механизма приобретают первоначальные значения). При выбранной длине отрезка на оси абсцисс l, соответствующего времени одного цикла, и скорости ведущего звена,  масштаб
масштаб  (2.1)
(2.1)
По оси ординат откладывают линейное перемещение Sc ведомого звена в масштабе \is (м/мм) или угловое перемещение φ в масштабе μф (рад/мм) для механизмов с вращающимся ведомым звеном.
В качестве начала отсчета удобно выбрать одно из крайних положений ведомого звена; при этом кривая Sc = Sc (t), представляющая перемещение ведомого звена от этого крайнего положения, будет располагаться по одну сторону от оси абсцисс. Точность графического метода определения перемещений невысока.
Аналитический метод. В тех случаях, когда необходимо получить высокую точность, применяют аналитические методы. Решения задачи аналитическим методом в общем случае сложны, так как зачастую приводят к громоздким вычислениям. Внедрение в практику инженерных расчетов цифровых ЭВМ позволило эту задачу упростить. При выборе способа аналитического исследования выбирают такой, реализация алгоритма которого на цифровых ЭВМ более проста. Наиболее удобным для этой цели является способ составления условия замкнутости всех закрытых контуров механизма, рассматриваемых как векторные многоугольники.
 Исходными данными для реализации этого метода служат кинематическая схема, представленная в прямоугольной системе координат, линейные размеры всех звеньев и аналитическая зависимость изменения обобщенной координаты, определяющей положение ведущего звена.
Исходными данными для реализации этого метода служат кинематическая схема, представленная в прямоугольной системе координат, линейные размеры всех звеньев и аналитическая зависимость изменения обобщенной координаты, определяющей положение ведущего звена.
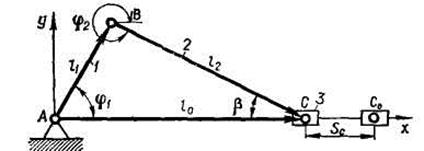
Рис. 2.2. К определению перемещения ползуна кривошипно-ползунного механизма
В качестве примера рассмотрим кривошипно-ползунный механизм. Кинематическая схема механизма (рис. 2.2) представляет собой замкнутый векторный треугольник, уравнение замкнутости которого
 = 0. (2.2)
= 0. (2.2)
Это условие можно также представить уравнениями проекций векторов на оси системы координат хАу (начало системы координат находится на оси вращения кривошипа А) в виде

 (2.3)
(2.3)
где φ1 , φ2 — углы, образованные звеньями 1 и 2 с осью Ах (рис. 2.2); l1 l2 — длины звеньев 1 и 2; l0 = Хс — отстояние звена 3.
В этих уравнениях знаки при слагаемых определяются знаками тригонометрических функций.
В уравнениях (2.3) l1 l2 и угол поворота ведущего звена  φ1 известны, подлежат определению величины φ2 и Хс.
φ1 известны, подлежат определению величины φ2 и Хс.
Используя геометрические соотношения замкнутой цепи ABC и записав значение  (2.4)
(2.4)
можно получить положение ведомого звена в зависимости от угла φ1 поворота кривошипа в виде Хс  , а обозначив
, а обозначив  , записать
, записать  (2.5)
(2.5)
Составив алгоритм и программу реализации (например в Matcad) для соответствующего ПК, можно получить числовое решение с необходимой точностью.
Дата добавления: 2015-02-05; просмотров: 1804;