Влияние среды на характер реакции
Из папки “Радиоавтоматика” вызвать лабораторную работу № 4 (Lab_rab4). Появятся три модели, которые используются для моделирования систем трех типов: статической и астатических первого и второго порядков.
1. Исследование ошибок при постоянном, линейном и квадратичном воздействиях.
1.1. Установить во всех трех моделях постоянную времени Т, равную заданной, а коэффициент передачи К в 5раз меньше заданного (П5).
1.2. Подсоединить к входам моделей единичный скачок. Выходы моделей и входное воздействие подсоединить к Plot. Запустить моделирование (П8). Развернуть Plot на весь экран (П11).Замерить статическую ошибку. Сравнить с теоретическим значением.
1.3. Отсоединить от входов моделей единичный скачок и подать линейное воздействие. Запустить моделирование. Зарисовать полученные процессы. Для входного воздействия определить Vx как приращение процесса за 1 с. Подсоединить к Plot только выходы вычитающих устройств (ошибки). Запустить моделирование. Развернуть Plot на весь экран. Замерить скоростную ошибку. Для линейно возрастающей ошибки замерить координаты двух точек в установившемся режиме (П20) и по ним рассчитать коэффициенты прямой линии. Сравнить полученные результаты с теоретическими.
1.4. Отсоединить от входов моделей линейное воздействие и подать квадратичное. К Plot подсоединить входное воздействие и выходы всех моделей. Запустить моделирование. Зарисовать входной и выходные процессы. Для входного процесса определить значение ax, учитывая, что при t = 1 с значение входного процесса равно ax/2. Подсоединить к Plot только выходы вычитающих устройств. Просмотреть и зарисовать ошибку по ускорению. Замерить ошибку. Для квадратичной зависимости измерить координаты трех точек в установившемся режиме. По ним определить коэффициенты параболы. Сравнить полученные результаты с теоретическими.
1.5. Установить во всех моделях коэффициент передачи К равным заданному. Запустить моделирование. Во сколько раз изменились ошибки по ускорению? Почему?
2. Исследование динамических ошибок при случайном задающем воздействии.
2.1. Ко входам моделей подсоединить случайное воздействие, сформированное фильтром нижних частот из белого шума. Установить заданное значение Tx. Подсоединить к Plot входной процесс и выходы всех моделей. Запустить моделирование. Описать, как проявляется динамическая ошибка, сравнивая входной и выходной процессы. Насколько отличаются выходные процессы в системах различного типа? При каком характере входного процесса отличия максимальны? Замерить максимальное и минимальное значения входного процесса. Рассчитать среднеквадратическое значение σ = (xзмакс – xзмин)/6 и дисперсию σ2xз. Замерить максимальное и минимальное значения выходного процесса астатической системы первого порядка. Рассчитать среднеквадратическое значение σвых. Просмотреть в крупном масштабе участок, где выходные процессы максимально отличаются друг от друга (П13). Замерить максимальное отличие Δy выходных процессов статической системы и астатической системы второго порядка от выходного процесса астатической системы первого порядка. Рассчитать отношение Δy/σвых.
2.2. Установить значение коэффициента передачи во всех трех моделях равным 0,1 заданного значения Запустить моделирование. Какие изменения произошли в выходных процессах как по отношению друг к другу, так и по отношению к входному процессу. Объяснить эти изменения. Произвести измерения аналогично п.2.1.
3.Исследование ошибок в астатической системе первого порядка при случайных входных воздействиях.
3.1. Сместить кнопку вертикальной прокрутки так, чтобы на экране появились три модели астатической системы первого порядка. Во всех моделях установить значение коэффициента передачи равным 0,1 заданного значения. В первых двух моделях установить постоянную времени Т равной заданной, а в третьей модели – равной нулю. На вход первой модели подать белый шум. Его интенсивность устанавливается коэффициентом передачи блока Gain (рекомендуемое значение 0,1). Выход первой модели подсоединить к Plot. Выходной процесс этой модели равен ошибке по возмущению. На входы второй и третьей моделей подать узкополосный случайный процесс. Постоянную времени инерционного звена, формирующего этот процесс, установить равной заданной. К Plot подсоединить выходы вычитающих устройств этих моделей. Выходной процесс вычитающего устройства равен динамической ошибке.
3.2. Запустить моделирование. Замерить максимальное и минимальное значения контролируемых процессов. Если наложение процессов затрудняет измерения, просмотреть процессы отдельно. Подсчитать среднеквадратические отклонения и дисперсии.
3.3. Проделать п.3.2 для коэффициентов передачи, равных 0,2К; 0,5К; К; 2К; 5К; 10К, где К – заданное значение коэффициента передачи. Оформить результаты измерений пп.3.2 – 3.3 в форме таблицы. Построить зависимости дисперсии ошибок от коэффициента передачи. Объяснить эти зависимости.
3.4. Просмотреть выходные процессы второй и третьей моделей и входной процесс. Сравнить выходные процессы между собой и с входным процессом. Почему ошибка в системе с инерционным фильтром больше, чем в системе без фильтра?
Завершить работу (П21).
Контрольные вопросы
1. Что такое динамическая ошибка и ошибка по возмущению? Как записывается изображение ошибки?
2. Как определяются статическая ошибка, скоростная ошибка и ошибка по ускорению?
3. Какой будет статическая ошибка в статических и астатических системах?
4. Какой будет скоростная ошибка в статических и астатических системах?
5. Какой будет ошибка по ускорению в статических и астатических системах?
6. Как находится дисперсия динамической ошибки и ошибки по возмущению при случайных воздействиях?
7. При каком условии дисперсия динамической ошибки практически не зависит от типа системы?
8. Как зависит дисперсия динамической ошибки от коэффициента передачи разомкнутой системы в астатической системе первого порядка?
9. Как и почему дисперсия динамической ошибки зависит от постоянной времени инерционного звена, входящего в астатическую систему первого порядка?
10. Как зависит дисперсия ошибки по возмущению от коэффициента передачи разомкнутой системы в астатической системе первого порядка?
Лабораторная работа № 5
Оптимальные линейные САР
Основные сведения
Задача оптимального синтеза линейной системы авторегулирования при случайных воздействиях заключается в определении такой структуры и параметров системы, при которых ошибки минимальны. Это так называемая задача оптимальной линейной фильтрации. Она была решена Колмогоровым, Винером, Калманом. В постановке Винера и Колмогорова входные процессы задаются их энергетическими спектрами. Для САР входными процессами являются задающее xз(t) и возмущающее xв(t) воздействия с энергетическими спектрами Sxз(w) и Sxв(w). Оптимальная частотная характеристика без учета физической реализуемости системы имеет вид:
Копт(jw) = Sxз(w)/[Sxз(w) + Sxв(w)].
Объясняется такая форма частотной характеристики просто. В области частот, где Sxв(w) = 0 АЧХ замкнутой системы равна 1, что и требуется для безошибочного слежения. В области частот, занятых спектром возмущающего воздействия, коэффициент передачи должен быть тем меньше, чем больше интенсивность помехи.
Неудобство данного подхода для синтеза САР заключается в том, что определяется только частотная характеристика замкнутой системы, а структура системы неочевидна. В этом отношении удобнее подход Калмана, определяющий структуру оптимальной системы. В отличие от предыдущего подхода, описывающего задающее воздействие энергетическим спектром, в подходе Калмана задающее воздействие образуется пропусканием белого шума через формирующий фильтр, который строится как устройство с обратной связью. Формирующий фильтр описывается векторным дифференциальным уравнением, которое называется уравнением состояния:
dXз(t)/dt = AXз(t) + Bn(t),
где n(t) – белый шум,
Xз(t) – вектор-столбец переменных состояния, которыми обычно являются сам процесс xз(t) и его производные,
А – матрица системы,
В – матрица управления.
Для формирования задающего воздействия к уравнению состояния добавляется уравнение наблюдения:
xз(t) = CXз(t),
где С – матрица наблюдения, устанавливающая связь процесса xз(t) с вектором переменных состояния Xз(t).
 
   

| ||||||||||||||
| Рис. 29 |
По этим уравнениям построена модель, представленная на рис. 29. Сформированное таким образом задающее воздействие поступает на вход САР вместе с возмущающим воздействием, которое считается белым шумом. Доказано, что оптимальный фильтр Калмана повторяет структуру формирующего фильтра с точностью до матричного коэффициента передачи К(рис. 30).Элементы матрицы К и определяют оптимальность системы.

 
  
     
| ||||||||||||||
| Рис. 30 |
Проиллюстрируем сказанное на примере системы первого порядка. Пусть в качестве формирующего фильтра используется интегрирующая цепь с постоянной времени Тф. Ее передаточная функция: Кф(р) = 1/(1 + рТф). Этой передаточной функции соответствует дифференциальное уравнение в операторной форме:
(рТф + 1)xp(t) = n(t).
В обычной форме оно записывается так:
 .
.
Отсюда
 .
.
Модель, построенная по этому уравнению, изображена на рис. 31
|


 
| ||||||||||
| Рис. 31 |


Оптимальная система представлена на рис. 32.
Оптимальное значение коэффициента передачи:
 , (13)
, (13)
где r - отношение спектральных плотностей случайных процессов n(t) и xв(t).
|
 
  
  
  
| ||||||||||||
| Рис. 32 |


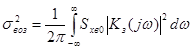
Дисперсия ошибки слежения в оптимальной системе:
 . (14)
. (14)
Рассмотрим ошибки в системе, отличающейся от оптимальной. Отличие системы от оптимальной может заключаться как в отличии коэффициента К от оптимального при оптимальной структуре системы, так и в неоптимальности самой структуры.
Отличие коэффициента передачи К от оптимального приведет к увеличению ошибки. Ошибка складывается из динамической ошибки и ошибки по возмущению. Дисперсия динамической ошибки
 .
.
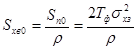
Спектральная плотность задающего воздействия
 .
.
Дисперсия задающего воздействия
 .
.
Выразим спектральную плотность Sn0 процесса n(t) через дисперсию задающего воздействия: Sn0 = 2Tфs2xз.
Частотная характеристика разомкнутой системы для схемы, изображенной на рис. 32, имеет вид:

 .
.
И соответственно,
 .
.
Тогда
 . (15)
. (15)
 
| ||||||||||||||||||||||||||
| Рис. 33 |
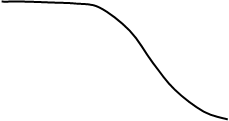
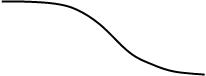
Для пояснения причины уменьшения динамической ошибки с ростом коэффициента передачи К обратимся к рис. 33, на котором представлены энергетический спектр процесса xз(t) (пунктирная линия) и АЧХ замкнутой системы при различных значениях КТф (сплошные линии). Видим, что чем больше КТф, тем меньше отличие коэффициента передачи замкнутой системы от 1 в области частот, занятых спектром задающего воздействия.
Дисперсия ошибки по возмущению вычисляется по формуле:
 .
.
Так как спектральная плотность возмущающего воздействия в r раз меньше спектральной плотности Sn0, то
и
 . (16)
. (16)
Дисперсия ошибки по возмущению увеличивается с ростом КТф, так как увеличивается площадь под АЧХ замкнутой системы. Зависимость дисперсии суммарной ошибки s2 = s2дин + s2воз от КТф показана на рис. 34 для различных значений r. Минимум достигается при оптимальном значении коэффициента передачи. Следует отметить, что оптимум не очень критичен и при двукратном отличии коэффициента передачи от оптимального дисперсия ошибки увеличивается на 15 – 20 %.
Рассмотрим теперь, к какому увеличению дисперсии приведет отличие структуры системы от оптимальной. Допустим, что система первого порядка (рис. 32) осуществляет слежение за процессом xз(t), образованным из белого шума формирующим фильтром второго порядка с пере-
 
     
| ||||||||||||||||||||||
| Рис. 34 |
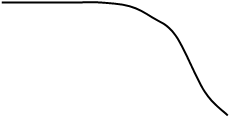
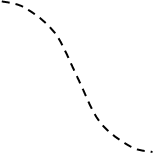
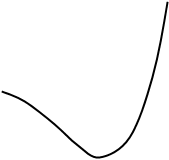
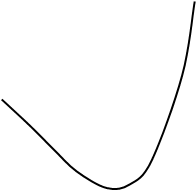
даточной функцией Кф(р) = =1/(1 + рТф1)2. Подберем Тф1 так, чтобы площади под |Кф(jw)½2 для однозвенного и двухзвенного фильтров были одинаковыми. Тогда будет соблюдаться равенство дисперсий выходных процессов обоих фильтров при одинаковой спектральной плотности входного белого шума. Это условие выполняется при Тф1 = Тф/2. На рис. 35 представлены АЧХ фильтров: однозвенного (сплошная линия) и двухзвенного (пунктирная линия). Из-за отличия спектров задающего воздействия изменится динамическая ошибка. Дисперсия динамической ошибки станет равной:
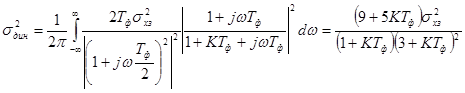 .
.
Дисперсия ошибки по возмущению останется прежней, так как частотная характеристика замкнутой системы не изменилась. На рис. 36 показано, во сколько раз увеличивается минимальная дисперсия суммарной ошибки в системе с неоптимальной структурой по сравнению с дисперсией ошибки в оптимальной системе в зависимости от r.
| 
    
| |||||||||||||||||||||||||||||||||
| Рис. 35 | Рис. 36 |


Дисперсия ошибки в оптимальной системе рассчитана по формуле:
 .
.
Исследуемая модель, содержащая формирующий фильтр и оптимальную систему, приведена на рис. 37.
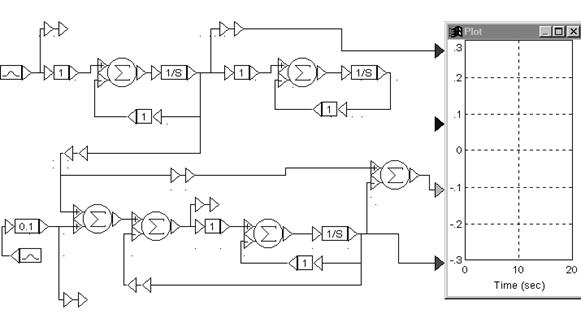
Рис. 37
В верхней части модели расположен формирующий фильтр: одно- и двухзвенный, а в нижней части – оптимальная система для задающего воздействия, сформированного однозвенным фильтром.
Дополнительная информация по тематике лабораторной работы изложена в [1, §8.1, 8.5, 8.6], [2, §8.2 – 8.5], [3, §6.2].
Задание на предварительный расчет
1. Рассчитать по формулам (13) – (16) оптимальное значение коэффициента передачи, дисперсию ошибки в оптимальной системе и зависимости дисперсий динамической ошибки, ошибки по возмущению и суммарной ошибки от коэффициента передачи. Принять s2xз = 1, остальные параметры взять из таблицы:
| Вариант | ||||||||||||
| r | ||||||||||||
| Тф,с | 0,5 |
Построить полученные зависимости.
2. Составить модель формирующего фильтра и оптимальной системы с рассчитанными параметрами.
Программа работы
Из папки “Радиоавтоматика” вызвать лабораторную работу №5 (Lab_rab5).
1. Определение статистических характеристик входных процессов.
1.1. Задать коэффициенты передачи блоков Gain в формирующем фильтре и в оптимальной системе равными рассчитанным. На вход оптимальной системы подать сумму задающего и возмущающего воздействий.
1.2. Подсоединить к Plot выход источника белого шума n(t) (к верхнему входу), выход формирующего фильтра xз(t) и выход источника белого шума xв(t). Запустить моделирование (П8). Определить по виду процессов xз(t) и xв(t), какой из них имеет меньшую ширину спектра. Просмотреть спектры всех процессов (П18). Оценить по спектрам значение r.Убедиться, что задающее воздействие является узкополосным процессом. Вернуть Plot в режим изображения процессов (П18). Для определения корреляции водных процессов просмотреть эллипс рассеяния (П19). Если оси эллипса рассеяния не наклонны, то процессы некоррелированы. Сделать вывод о корреляции входных процессов. Перевести Plot в режим просмотра процессов.
2. Исследование зависимости дисперсии ошибки от коэффициента передачи К.
2.1. Подсоединить к Plot xз(t), y(t) и d(t).Возмущающее воздействие отсоединить от входа системы. Запустить моделирование. Развернуть Plot на весь экран. Если на Plot нет шкалы, нанести ее (П9). Определить максимальное и минимальное значения процесса xз(t). Рассчитать среднеквадратическое отклонение и дисперсию. Сравнить задающее воздействие и выходной процесс. Как они связаны между собой? При необходимости просмотреть часть процесса (П13). Просмотреть, как изменится связь между этими процессами при изменении коэффициента передачи К. Для этого просмотреть процессы при К, равном 0,2Копт и 5Копт. Объяснить изменения в процессах.
2.2. Установить коэффициент передачи К равным 0,2Копт. Подсоединить к входу системы задающее воздействие, к входу Plot подсоединить d(t). Запустить моделирование. Развернуть изображение на весь экран. Замерить максимальное и минимальное значения динамической ошибки dдин. Подсоединить к входу системы задающее и возмущающее воздействия. Запустить моделирование. Измерить максимальное и минимальное значения суммарной ошибки dS. Отсоединить от входа системы задающее воздействие. Подсоединить к входу Plot выходной процесс y(t) и отсоединить d(t). Запустить моделирование. Записать максимальное и минимальное значения ошибки по возмущению dвоз.
2.3. Проделать п.2.2 для значений коэффициентов передачи, равных 0,5Копт, Копт, 2Копт и 5Копт. Результаты измерений оформить в виде таблицы.
2.4. По результатам измерений рассчитать значения дисперсии ошибок: динамической, по возмущению и суммарной: s2 = [(dмакс - dмин)/6]2. Построить эти зависимости. Сравнить их с теоретическими.
3. Исследовать ошибки в системе с неоптимальной структурой (по заданию преподавателя).
Контрольные вопросы
1. Чем отличается постановка задачи в оптимальной фильтрации Винера - Колмогорова и в оптимальной фильтрации Калмана?
2. Как определяется частотная характеристика оптимальной системы в оптимальной фильтрации Винера - Колмогорова?
3. Как определяется структура оптимальной системы в оптимальной фильтрации Калмана?
4. Какой вид имеет формирующий фильтр первого порядка?
5. Какой вид имеет оптимальная система, если задающее воздействие формируется фильтром первого порядка?
6. Почему оптимальный коэффициент передачи зависит от r?
7. Почему и как изменяется дисперсия динамической ошибки при изменении коэффициента передачи К?
8. Почему и как изменяется дисперсия ошибки по возмущению при изменении коэффициента передачи К?
9. Как зависит дисперсия суммарной ошибки от коэффициента передачи К?
10. Почему дисперсия ошибки увеличивается в системе с неоптимальной структурой?
Лабораторная работа № 6
Нелинейная модель системы
фазовой автоподстройки частоты
Основные сведения
Анализ линейной модели может дать полную информацию о работе САР в режиме малых отклонений от установившегося состояния. Однако для исследования таких явлений, как захват и срыв слежения, линейная модель непригодна. В этом случае необходимо обращаться к нелинейной модели. Так как нелинейная модель описывается нелинейным дифференциальным уравнением, то стараются эту модель не усложнять. Поэтому в модели, как правило, учитываются нелинейные свойства только одного элемента.
 



| ||||||||
| Рис. 38 |
Из всех систем радиоавтоматики самой распространенной является система фазовой автоподстройки частоты (ФАПЧ), представленная на рис. 38.Выходное напряжение фазового дискриминатора зависит от раз-

  
| ||||||||||||||
| Рис. 39 |
ности фаз входных колебаний. Часто используется косинусоидальная дискриминационная характеристика фазового дискриминатора: Uфд = = Umфдcosj (рис. 39).
Нелинейная модель системы ФАПЧ изображена на рис. 40. В этой модели фазо-

  
  
 

   
  
| ||||||||||||||||
| Рис. 40 |
вый дискриминатор отображается последовательным соединением вычитающего устройства, интегратора и нелинейного элемента в соответствии с его математическим описанием:

 ,
,
где jн – начальная разность фаз,
Wн = wвх - wпг0 – начальная расстройка,
wпг0 – частота перестраиваемого генератора при нулевом управляющем напряжении.
Значение начальной разности фаз определяет знак обратной связи. Если 0<jн<p, то, как видно из рис. 39, тангенс угла наклона дискриминационной характеристики отрицательный и, следовательно, обратная связь положительна. При p<jн<2p обратная связь отрицательна. Значит, разность фаз в установившемся режиме jуст будет находиться в диапазоне (p,2p) или отличающемся от него на величину, кратную 2p. Начальная расстройка Wн определяет величину входного процесса интегратора и, следовательно, начальную скорость изменения разности фаз j.
Рассмотрим процессы в идеализированной системе ФАПЧ, для которой постоянные времени Тфнч и Тпг равны нулю. Модель идеализированной системы ФАПЧ представлена на рис. 41.
 

  


| ||||||||||||||
| Рис. 41 |
В этой модели произведение UmфдКуптКпг, равное максимальному отклонению частоты перестраиваемого генератора, обозначено через Wу – полосу удержания. Полоса удержания – это максимальная начальная расстройка, которая компенсируется системой ФАПЧ. По этой модели составляется дифференциальное уравнение в операторной форме:
 .
.
Учитывая, что р – оператор дифференцирования и рjн = 0, получаем:
 . (17)
. (17)
Система ФАПЧ в установившемся режиме поддерживает разность фаз входных колебаний постоянной. Следовательно, в установившемся режиме dj/dt = 0 и, как следует из уравнения (17), Wн - Wуcosjуст = 0. Отсюда разность фаз в установившемся режиме
jуст = arccos(Wн/Wу). (18)
Постоянство разности фаз в установившемся режиме означает, что wпг = = wвх. Режим, при котором расстройка в установившемся состоянии равна нулю, а разность фаз постоянна, называется режимом удержания.
Переходные процессы в системе можно исследовать, пользуясь фазовым портретом системы. Решение дифференциального уравнения (19) изображается на плоскости, декартовыми координатами которой являются искомая функция j и ее производная dj/dt. В любой момент времени состояние системы характеризуется определенными значениями разности фаз колебаний j и мгновенной расстройки dj/dt и на плоскости отображается точкой, которую называют изображающей. С течением времени j и dj/dt изменяются, и изображающая точка перемещается по плоскости. Траектория движения этой точки называется фазовой траекторией. Совокупность фазовых траекторий, построенных для различных начальных условий, образует фазовый портрет системы.
  
          
| ||||||||||||||||||||||||||||||||||
| Рис. 42 |
Фазовый портрет идеализированной системы ФАПЧ строится по уравнению (19), которое теперь надо понимать как алгебраическое, связывающее независимую переменную j и зависимую переменную dj/dt. Линия фазовых траекторий представляет собой, как видно из уравнения (19), перевернутую косинусоиду с амплитудой Wу, приподнятую на величину начальной расстройки Wн. На рис.42 изображен фазовый портрет для Wн = Wу/2. Стрелками показано направление движения изображающей точки. Это направление определяется по формальному правилу: если производная функции положительна, то функция растет. В верхней полуплоскости dj/dt > 0 и изображающая точка движется в сторону возрастания j, а в нижней полуплоскости – в сторону уменьшения j, так как dj/dt < 0.
В фазовом портрете существуют точки, в которые входят и из которых выходят фазовые траектории. Эти точки называются особыми, они соответствуют состояниям равновесия. Особые точки, в которые входят фазовые траектории, называются устойчивыми особыми точками, и они соответствуют устойчивым состояниям равновесия. Заметим, что устойчивые особые точки находятся в том диапазоне разностей фаз, где, как мы отмечали ранее, обратная связь отрицательна.
Прослеживая движение изображающей точки, можно определить, как будут изменяться во времени разность фаз j (горизонтальная координата изображающей точки) и мгновенная расстройка dj/dt (вертикальная координата изображающей точки). Начальное состояние системы отображается точкой, находящейся на линии dj/dt = Wн. Так как начальная точка не находится на фазовой траектории (за исключением двух точек в интервале 2p), то возникает вопрос, как же точка попадет на фазовую траекторию. Обратимся к процессам, происходящим в идеализированной системе ФАПЧ. В идеализированной системе при ее замыкании мгновенно появляется напряжение на выходе фазового дискриминатора и мгновенно изменяется частота перестраиваемого генератора. Разность фаз при этом не успевает измениться и остается равной jн. Следовательно, изображающая точка переместится на фазовую траекторию по вертикальной линии. Например, если jн = p (точка 1 на рис. 42), то изображающая точка из своего начального положения 1 переместится по вертикальной линии на фазовую траекторию и далее будет двигаться по фазовой траектории к точке С. В установившемся ре-
 

     
  
    
| ||||||||||||||||||||||||||||||||||||||||
| Рис. 43 |
жиме разность фаз будет равна jуст2. Если jн = 0, то изображающая точка из своего начального положения 2 вертикально вниз перейдет на фазовую траекторию и будет двигаться по ней к устойчивой особой точке А. Строго говоря, то, что мы называем фазовой траекторией, представляет собой не одну траекторию, а бесконечное множество слившихся фазовых траекторий, соответствующих различным значениям jн.
Скорость движения изображающей точки по фазовой траектории непостоянна. Чем больше dj/dt, тем быстрее изменяется разность фаз j и быстрее движется изображающая точка. Другими словами, чем дальше от оси j находится изображающая точка, тем быстрее она движется. При приближении к горизонтальной оси скорость ее движения уменьшается до нуля.
Руководствуясь этим правилом, можно приближенно построить переходные процессы в системе (см. рис. 43). Пусть начальная разность фаз jн = p/2. Изображающая точка из своего начального положения (точка 3 на рис.42) будет двигаться по фазовой траектории вверх. При этом ее вертикальная координата dj/dt будет увеличиваться. В переходном процессе dj/dt – это тангенс угла наклона зависимости j(t). Следовательно, тангенс угла наклона будет расти, и j(t) будет изменяться с увеличивающейся крутизной. Крутизна будет расти до тех пор, пока изображающая точка не достигнет вершины фазовой траектории, то есть пока j не станет равным p. При дальнейшем движении изображающей точки dj/dt уменьшается и разность фаз изменяется с уменьшающейся крутизной. Мгновенная расстройка dj/dt сначала увеличивается от Wн до Wн+Wу, принимая максимальное значение при j = p, и затем уменьшается до нуля. Переходные процессы зависят от начальной разности фаз. Они показаны на рис.43 для jн = p (кривые 1) и для jн = 0 (кривые 2). При t = 0 мгновенная расстройка изменяется скачком.
С увеличением начальной расстройки фазовые траектории поднимаются, устойчивая и неустойчивая особые точки сближаются. При Wн=
|

|
