Механические колебания и волны. 3 страница

здесь:



или после взятия производной функции, с последующим возведением в квадрат результатов дифференцирования, приходим к соответствующим промежуточным результатам для каждой из пространственных координат:

откуда:
и аналогично:

откуда:
а также:

откуда:

Таким образом, имеем:



Складывая между собой полученные выражения для каждой из компонент, будем иметь соответственно:
или в окончательном виде:

Учитывая, что:
имеем:

Выразим теперь кинетическую энергию через импульсы в сферической системе координат. С учётом уравнений Гамильтона:
выражение для кинетической энергии в сферической системе координат, очевидно, может быть переписано в виде:

Дифференцирование выражения для кинетической энергии по каждой из обобщённых координат, даёт выражения вида:
поскольку:

а также с учётом того, что:


будем для гамильтониана соответственно иметь выражение вида:

где
Таким образом, в ходе проделанных выкладок, приходим к выражениям для гамильтониана соответственно в полярной:
и сферической системах координат:
где
Рассмотрим плоское движение частицы по орбите в плоскости  . Учитывая плоский характер орбиты, направим ось
. Учитывая плоский характер орбиты, направим ось  вдоль постоянного вектора
вдоль постоянного вектора  :
:
При таком выборе декартовой системы координат, две компоненты вектора момента импульса частицы  и
и  очевидно будут равняться нулю. Тогда, вектор момента импульса (углового момента) можно записать как:
очевидно будут равняться нулю. Тогда, вектор момента импульса (углового момента) можно записать как:
и движение совершается в плоскости, перпендикулярной оси . Из-за сохранения сектора  , значение угла
, значение угла  сохраняется:
сохраняется:


следовательно:

и гамильтониан:
после подстановки соответствующих граничных условий, очевидно, может быть сведен к виду:
Таким образом, при рассмотрении плоского движения частицы мы в равной мере можем пользоваться как полярной, так и сферической системами координат.
Покажем теперь, что импульс  на самом деле совпадает с - компонентой момента импульса
на самом деле совпадает с - компонентой момента импульса  . Для этого раскроем как векторное произведение:
. Для этого раскроем как векторное произведение:
Заметим, что вычисление скобок Пуассона приводит к соотношениям вида:
остальные же получают на основании правила циклической перестановки индексов, на основании которого можно легко получить аналитическое выражение для соответствующих проекций момента импульса:
Действительно, поскольку:
и как следствие:
то можно ограничиться только одной из проекций углового момента:

поскольку по определению:

тогда после подстановки данных значений переменных в выражение проекции момента импульса на ось , будем иметь соответственно:

раскрывая в полученном выражении скобки и учитывая, что:

будем иметь соответственно:
откуда следует, что:
преобразуя полученное выражение к виду:

будем иметь соответственно:
и таким образом:

Поэтому выражение для гамильтониана:

с учётом приведенных выше рассуждений можно будет представить далее к виду:

Поскольку для вектора:
оказывается справедливым:
имеем соответственно:

Именно такого рода гамильтонианом описывают движение электрона в атоме водорода. Найдём условия движения частицы по кругу. Так, например, если частица совершает устойчивое круговое движение в центральном силовом поле (поле постоянного потенциала), то очевидно её радиус будет являться постоянным:

отсюда следует, что первый член в выражении для энергии будет равен нулю:
В связи с этим удобно ввести так называемый эффективный потенциал:
Очевидно, частица будет совершать круговое движение  , при условии, что производная по радиусу от эффективного потенциала
, при условии, что производная по радиусу от эффективного потенциала  равна нулю:
равна нулю:
Учитывая выражение для потенциальной энергии:
имеем:
Выясним, как ведут себя разноименные взаимодействующие между собой заряды; т.е. задача будет сводиться к выяснению характера их взаимодействия. Для этого вычислим производную от по  и приравняем её нулю. В результате получим выражение вида:
и приравняем её нулю. В результате получим выражение вида:

Поскольку левая часть в полученном выражении отрицательна, необходимо, чтобы произведение зарядов имело отрицательный знак:

что в свою очередь будет соответствовать притяжению разноимённо заряженных частиц. Необходимо также отметить, что выражение:
является условием равновесия двух сил: центробежного отталкивания (левая часть) и кулоновского притяжения (правая часть). Действительно, поскольку по определению:
тогда для всех допустимых значений , будем иметь соответственно:
из не отрицательности  следует требование:
следует требование:


Данные неравенства задают допустимую область изменения . Так, неравенства:
показывают, что при  область движения становится не ограниченной – движение инфинитное. В этом случае эффективная сила
область движения становится не ограниченной – движение инфинитное. В этом случае эффективная сила  - направлена от центра, и частица уходит в бесконечность. Иными словами, инфинитному движению соответствует несвязанное состояние. При
- направлена от центра, и частица уходит в бесконечность. Иными словами, инфинитному движению соответствует несвязанное состояние. При  , движение совершается в ограниченной области пространства – финитное движение. В данном случае частица находится вблизи силового центра, а эффективная сила направлена к силовому центру, связанному с частицей
, движение совершается в ограниченной области пространства – финитное движение. В данном случае частица находится вблизи силового центра, а эффективная сила направлена к силовому центру, связанному с частицей  .
.
3.1.4.2. Многочастичные колебательные системы.
Исследуем теперь колебательные движения системы с  степенями свободы относительно некоторого устойчивого её равновесного положения. Это значит, что существуют значения
степенями свободы относительно некоторого устойчивого её равновесного положения. Это значит, что существуют значения  обобщённых координат
обобщённых координат  , когда силы отсутствуют:
, когда силы отсутствуют:

и система покоится. Выведем систему из равновесия, придав каждому равновесному значению  некоторую малую добавку
некоторую малую добавку  :
:

Разложим потенциальную энергию в ряд Тейлора:

однако в силу равенства:
линейные по члены исчезают и при  разложение:
разложение:
сводится к уравнению:
здесь:
есть силовая постоянная, характеризующая упругость (сопротивление) системы при одновременном растяжении  -той и
-той и  -той обобщённых координат. В ряде литературных источников данную константу называют ещё силовой постоянной. Необходимо отметить, что уравнения движения Ньютона в форме:
-той обобщённых координат. В ряде литературных источников данную константу называют ещё силовой постоянной. Необходимо отметить, что уравнения движения Ньютона в форме:
требуют в общем случае вычисления силы  . Для этого более подробно запишем полученное нами уже ранее выражение. Так, имеем соответственно:
. Для этого более подробно запишем полученное нами уже ранее выражение. Так, имеем соответственно:
и соответственно:
где учтено, что  . Откуда становится очевидным, что уравнение:
. Откуда становится очевидным, что уравнение:
переходит в линейную однородную систему дифференциальных уравнений:

избавимся теперь от масс  переходом к «масс-взвешенным» координатам:
переходом к «масс-взвешенным» координатам:

а именно:
Решение данной системы, обобщающей уравнение:
имеет гармонический вид:

или если колебательный процесс в многочастичной системе имеет косинусоидальную зависимость, тогда:

для каждой обобщённой координаты:

или

Числа  определяют вклад
определяют вклад  -той обобщённой координаты
-той обобщённой координаты  в коллективное колебание всей системы частиц, совершаемое с единой частотой
в коллективное колебание всей системы частиц, совершаемое с единой частотой  . Величины удобно нормировать как компоненты единичного вектора условием:
. Величины удобно нормировать как компоненты единичного вектора условием:

Тогда для данного колебания с частотой величина  – максимально возможное смещение частицы. Рассмотренное согласованное гармоническое движение всех частиц называют собственным, или нормальным, колебанием системы. Числа определяют так называемую форму нормального колебания. Нахождение частот и форм разрешённых нормальных колебаний сводится к решению алгебраической задачи. Подставив выражение условия нормировки в систему уравнений вида:
– максимально возможное смещение частицы. Рассмотренное согласованное гармоническое движение всех частиц называют собственным, или нормальным, колебанием системы. Числа определяют так называемую форму нормального колебания. Нахождение частот и форм разрешённых нормальных колебаний сводится к решению алгебраической задачи. Подставив выражение условия нормировки в систему уравнений вида:
будем иметь соответственно:

Сократив уравнение:

или

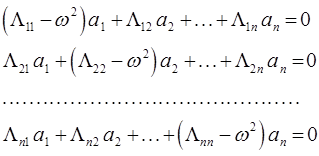
на ненулевую функцию  , получим систему линейных однородных уравнений для , то есть имеем соответственно:
, получим систему линейных однородных уравнений для , то есть имеем соответственно:

или в развёрнутом виде:
По теореме Кронекера – Капелли данная однородная система имеет нетривиальное решение только при нулевом значении детерминанта (определителя) системы:
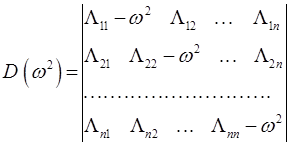
Если раскрыть определитель  , то по отношению к
, то по отношению к  он окажется к многочленом -й степени уже за счёт произведения диагональных элементов:
он окажется к многочленом -й степени уже за счёт произведения диагональных элементов:

Полученный многочлен называют вековым многочленом, а систему уравнений вида:
называют системой вековой, где уравнениями типа. Как известно, многочлен -й степени имеет ровно комплексных корней, т.е.

Действительность всех корней  гарантируется симметричностью матрицы:
гарантируется симметричностью матрицы:

Однако положительность , а, следовательно, и возможность получения действительных частот  является следствие постулированной устойчивости механической системы. Теперь уточним общее решение рассмотренной выше системы вековых уравнений:
является следствие постулированной устойчивости механической системы. Теперь уточним общее решение рассмотренной выше системы вековых уравнений:
Зная  -ю частоту , находим из однородной системы вековых уравнений -й набор неизвестных величин , нормированных условием вида:
-ю частоту , находим из однородной системы вековых уравнений -й набор неизвестных величин , нормированных условием вида:
Более точно полученный набор величин следует обозначать через  , явно указывая дополнительным индексом , для какой частоты он получен. Тогда в терминах введенных нами выше обозначений, общие решения для -й частоты будут иметь вид:
, явно указывая дополнительным индексом , для какой частоты он получен. Тогда в терминах введенных нами выше обозначений, общие решения для -й частоты будут иметь вид:

или

где  и
и  – амплитуда, и фаза -го нормального колебания. Значениями и можно распорядиться так, чтобы учесть любые начальные условия. Общее решение представляет собой комбинацию соответствующих частных решений:
– амплитуда, и фаза -го нормального колебания. Значениями и можно распорядиться так, чтобы учесть любые начальные условия. Общее решение представляет собой комбинацию соответствующих частных решений:
Таким образом,  оказывается линейной комбинацией «гармонических» координат
оказывается линейной комбинацией «гармонических» координат  :
:
или
Каждая из гармонических координат совершает независимое колебание со своей частотой и называется нормальной. В этих терминах выражение:
есть разложение произвольного колебания системы на нормальные колебания. Рассмотрим простейший пример колебаний системы с двумя степенями свободы:
Вековое уравнение этой системы:

Для симметричного случая, то есть когда  , уравнение:
, уравнение:

имеет простые решения вида:
Подставляя значения и в систему:
находим коэффициенты формы колебаний  ,
,  для
для  и
и  ,
,  для
для  и таким образом имеем соответственно:
и таким образом имеем соответственно:

где учтено требование нормировки:

В рамках рассматриваемой задачи частота , как видно отсюда, будет отвечать симметричному колебанию, а – антисимметричному. Это же видно и из разложения:
по нормальным координатам  и
и  данной задачи, то есть имеем:
данной задачи, то есть имеем:

Колебательные системы обнаруживают качественно новые черты, когда число частиц , связанных силами упругости, становится настолько большим, что в совокупности все частицы составляют уже непрерывную среду. Например, пусть дана цепочка одинаковых части, очень плотно заполняющих интервал  оси
оси  . В первом приближении упругая сила пропорциональна изменению расстояния между частицами. Поэтому для U принимается выражение, аналогичное тому, что было получено нами для случая одночастичных колебательных систем. Так, разлагая потенциал U в ряд Тейлора, имеем соответственно:
. В первом приближении упругая сила пропорциональна изменению расстояния между частицами. Поэтому для U принимается выражение, аналогичное тому, что было получено нами для случая одночастичных колебательных систем. Так, разлагая потенциал U в ряд Тейлора, имеем соответственно:

Величину  в данном выражении называют также равновесным расстоянием. При малых отклонениях от положения равновесия
в данном выражении называют также равновесным расстоянием. При малых отклонениях от положения равновесия  , где
, где  . Верхний индекс показывает, что величина вычислена в точке равновесия. Поскольку в случае одночастичных колебательных систем оказывается справедливым условие:
. Верхний индекс показывает, что величина вычислена в точке равновесия. Поскольку в случае одночастичных колебательных систем оказывается справедливым условие:
Дата добавления: 2015-03-14; просмотров: 774;