Механические колебания и волны. 1 страница
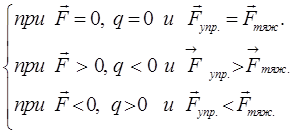
3.1.4.1. Движение в центральном поле сил.
Квантовая механика занимает своеобразное положение в ряду физических теорий. Обычно более общая теория может быть сформулирована логически замкнутым образом, не зависимо от менее общей теории, являющейся её предельным случаем. Так, релятивистская механика может быть построена на основании своих принципов, без всяких ссылок на ньютоновскую механику. Формулировка же основных положений квантовой механики, принципиально невозможна без привлечения механики классической. Таким образом, квантовая механика содержит в себе классическую в качестве своего предельного случая. Мало того, она нуждается в этом самом предельном случае для самого своего обоснования. При этом переход от классической механики к квантовой, осуществляется через механику колебаний и волн по-аналогии с тем, как происходит предельный переход от волновой к геометрической оптике. Необходимо подчеркнуть, что указанный выше предельный переход не только неизбежен, но и необходим. Он позволяет представить квантовую механику не как систему постулатов «загадочного» происхождения, а как стройную физическую теорию с определённым логическим выводом (терминологически и идейно) из классического подхода. Так, при выводе уравнения Шрёдингера, достаточно удобным является рассмотрение движения частицы в центральном поле сил. Характерными примерами систем такого типа является гармонический осциллятор и движение частицы в кулоновском поле сил. Говорят, что задано центральное поле сил, если потенциальная энергия U зависит только от расстояний между частицами. Для одной частицы это предполагает зависимость U только от длины  радиус-вектора
радиус-вектора  :
:
О потенциальном поле  в общем случае говорят как о поле сферической симметрии. Наличие такой симметрии приводит в общем случае к дополнительным интегралам движения. Покажем, что одним из них является вектор момента импульса (углового момента)
в общем случае говорят как о поле сферической симметрии. Наличие такой симметрии приводит в общем случае к дополнительным интегралам движения. Покажем, что одним из них является вектор момента импульса (углового момента)  :
:

почленное дифференцирование данного выражения даёт:
однако в силу того, что:

первый член в выражении:
исчезает как векторное произведение коллинеарных векторов, т.е.
Во втором члене следует иметь ввиду уравнения движения:
При вычислении компонент градиента:
учтём сферическую симметрию:

т тогда непосредственно из выражения вида:
находим:



а также учитывая, что:
получаем, что сила направлена по радиус-вектору:
Следовательно, вектор  в выражении:
в выражении:
коллинеарен , т.е.
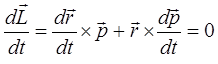
и таким образом:

Закон сохранения импульса (углового момента) имеет наглядную геометрическую интерпретацию. Так, поскольку пары векторов:
 и
и 
являются коллинеарными, то это в свою очередь означает, что движение частицы будет происходить в одной фиксированной плоскости, перпендикулярной постоянному вектору .Это утверждение следует из смысла векторного произведения и интерпретации  как вектора, касательного траектории движения. По этой причине можно говорить, что в центральном поле сил орбитальное движение является в общем случае плоским.
как вектора, касательного траектории движения. По этой причине можно говорить, что в центральном поле сил орбитальное движение является в общем случае плоским.
3.1.4.1.а. Гармонический осциллятор.
Рассмотрим простейший тип колебательного движения – свободные (собственные) незатухающие механические колебания, т.е. такие колебания, которые совершаются без внешнего воздействия за счёт первоначально полученной телом энергии. При рассмотрении колебаний такого вида – пренебрегают силой сопротивления. Простейшим типом колебательного движения являются гармонические колебания, т.е. такие колебания, при которых колеблющаяся величина изменяется со временем по закону синуса или косинуса. Рассмотрим одномерное движение частицы (материальной точки) с массой  , на которую действует вдоль одной из координатных осей упругая возвращающая сила
, на которую действует вдоль одной из координатных осей упругая возвращающая сила  . Очевидно, при малых отклонениях частицы (материальной точки) от положения равновесия, под действием упругой возвращающей силы , будут совершаться колебания относительно этой точки равновесия. Такую колебательную систему называют гармоническим осциллятором. Примерами гармонического осциллятора являются пружинный (материальная точка на пружине), математический и физический маятники, а также колебательный контур (для токов и напряжений столь малых, что элементы контура можно было бы считать линейными). Пусть у нас имеется некоторое тело массой – m, материальная точка, подвешенное на пружине жёсткостью
. Очевидно, при малых отклонениях частицы (материальной точки) от положения равновесия, под действием упругой возвращающей силы , будут совершаться колебания относительно этой точки равновесия. Такую колебательную систему называют гармоническим осциллятором. Примерами гармонического осциллятора являются пружинный (материальная точка на пружине), математический и физический маятники, а также колебательный контур (для токов и напряжений столь малых, что элементы контура можно было бы считать линейными). Пусть у нас имеется некоторое тело массой – m, материальная точка, подвешенное на пружине жёсткостью  . В этом положении упругая сила
. В этом положении упругая сила  , приложенная к телу, уравновешивает силу тяжести
, приложенная к телу, уравновешивает силу тяжести  , т.е. в данном случае справедливо равенство:
, т.е. в данном случае справедливо равенство:
Тогда смещение материальной точки относительно оси  , положение равновесия, очевидно будет равно нулю, т.е.
, положение равновесия, очевидно будет равно нулю, т.е.  . Если к телу приложить некоторую силу , оттянув пружину, т.е. сместив данное тело из положения равновесия, при котором , то тело выйдет из состояния равновесия. При этом на тело будет действовать большая упругая сила , которая будет тем больше, чем большее смещение
. Если к телу приложить некоторую силу , оттянув пружину, т.е. сместив данное тело из положения равновесия, при котором , то тело выйдет из состояния равновесия. При этом на тело будет действовать большая упругая сила , которая будет тем больше, чем большее смещение  будет получать подвешенное на пружине тело.
будет получать подвешенное на пружине тело.
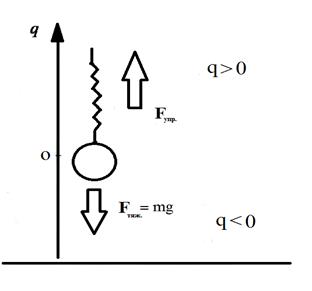
Рис. 1. Модель гармонического осциллятора
Очевидно для рассматриваемой системы гармонического осциллятора, будут справедливы условия вида:
Согласно закону Гука, при упругих деформациях возникает сила, направленная к положению равновесия и пропорциональная смещению тела (его деформации), т.е.

здесь – коэффициент пропорциональности (жёсткость пружины). Знак минус в данном выражении показывает, что возвращающая сила всегда направлена в сторону положения равновесия. Силы, неупругие по природе, но аналогичные по свойствам, называют квазиупругими. Квазиупругие силы обычно возникают при малых деформациях. Таким образом, изменение упругой силы, пропорционально изменению длины пружины или смещению тела. На основании выражения второго закона Ньютона:
а также учитывая, что:


откуда:

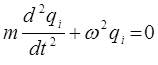
после соответствующих подстановок, получим дифференциальное уравнение, описывающее одномерное движение материальной точки:

преобразуя полученное выражение к виду:

принимая:

будем иметь соответственно:
откуда соответственно:

К аналогичному уравнению можно прийти и несколько другим путём, используя формальные подходы Лагранжа и Гамильтона, рассмотренные нами уже ранее. Так, при рассмотрении задачи на гармонический осциллятор, выражение для функции Лагранжа, в рамках соответствующего подхода, очевидно, будет иметь вид:
здесь обобщённая координата , есть величина отклонения частицы с массой от положения равновесия, а – константа жёсткости. Найдём теперь обобщённый импульс  и обобщённую силу
и обобщённую силу  , имеем соответственно:
, имеем соответственно:
и подставим полученные выражения для обобщённой силы и обобщённого импульса в уравнение Лагранжа:
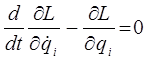
учитывая, что:


имеем:
откуда соответственно:

или после соответствующих подстановок:
Учитывая, что:

имеем:
принимая:

имеем:
или
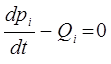
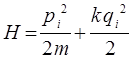
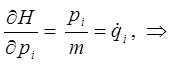
Аналогичным образом решается такого рода задача и в формализме Гамильтона. Для этих целей представим полную энергию рассматриваемой системы как сумму кинетической и потенциальной энергий, т.е.
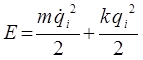
или в импульсной форме:

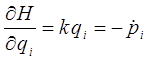
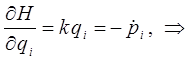
Учитывая уравнения Гамильтона:
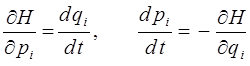
или
исходя из уравнения вида:
имеем соответственно:
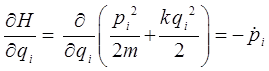
и таким образом:
а также:
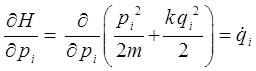
откуда:

или

Подстановка полученного выражения для обобщённого импульса в уравнение:
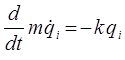
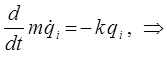
приводит к уравнению Ньютона:
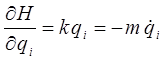
или
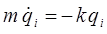
Учитывая, что:

имеем:

откуда:
принимая:
имеем:
или
Таким образом, решение задачи о гармоническом осцилляторе в рамках формализма Гамильтона, как и в случае формализма Лагранжа, совпадает с результатами механики Ньютона. Полученное выражение представляет собой линейное однородное дифференциальное уравнение второго порядка с постоянными коэффициентами. В общем случае, линейным дифференциальным уравнением второго порядка называется уравнение первой степени, линейное относительно
неизвестной функции и её производных. Будем записывать его в виде:

где  и
и  – постоянные. Функция
– постоянные. Функция  называется правой частью уравнения. Если функция тождественно равна нулю (как в нашем случае), то такое уравнение называется линейным уравнением без правой части (или однородным). В противном случае – линейным уравнением с правой частью (или неоднородным). Достаточно очевидно, что при
называется правой частью уравнения. Если функция тождественно равна нулю (как в нашем случае), то такое уравнение называется линейным уравнением без правой части (или однородным). В противном случае – линейным уравнением с правой частью (или неоднородным). Достаточно очевидно, что при  и , дифференциальное уравнение:
и , дифференциальное уравнение:
сводится к уравнению вида:

в данном уравнении:

Теорема 1: «Если  и
и  – решения линейного уравнения
– решения линейного уравнения  , то функция вида
, то функция вида  при любых постоянных c1 и c2 , также является решением уравнения. Здесь выражение
при любых постоянных c1 и c2 , также является решением уравнения. Здесь выражение  является линейной комбинацией соответствующих частных решений
является линейной комбинацией соответствующих частных решений  и
и  ». Из сказанного выше можно заключить, что если и – решения уравнения:
». Из сказанного выше можно заключить, что если и – решения уравнения:

такие, что их отношение не равно постоянной величине:
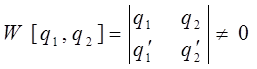
то линейная комбинация этих функций  , является решением дифференциального уравнения. Нахождение общего решения дифференциального уравнения принципиально, т.к. из общего решения при любых заданных условиях может быть найдено частное решение, удовлетворяющее этим условиям. Для проверки линейной независимости функций и , являющихся частными решениями дифференциального уравнения, необходимо составить и решить так называемый определитель Вронского (Вронскиан)
, является решением дифференциального уравнения. Нахождение общего решения дифференциального уравнения принципиально, т.к. из общего решения при любых заданных условиях может быть найдено частное решение, удовлетворяющее этим условиям. Для проверки линейной независимости функций и , являющихся частными решениями дифференциального уравнения, необходимо составить и решить так называемый определитель Вронского (Вронскиан)  . При этом Вронскиан не должен обращаться в нуль
. При этом Вронскиан не должен обращаться в нуль  :
:
Обычно частные решения дифференциального уравнения ищут в виде показательной функции  , где
, где  - постоянная величина. Такой выбор вида частного решения обусловлен тем, что это единственная элементарная функция, все производные которой подобны между собой и к самой функции. Функцию вида называют ещё стандартной подстановкой. Дифференцируя функцию , беря вначале первую, а затем вторую производную:
- постоянная величина. Такой выбор вида частного решения обусловлен тем, что это единственная элементарная функция, все производные которой подобны между собой и к самой функции. Функцию вида называют ещё стандартной подстановкой. Дифференцируя функцию , беря вначале первую, а затем вторую производную:

Возвратимся теперь к исходному дифференциальному уравнению:
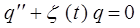
очевидно подстановка значения и  в данное уравнение, даст выражение вида:
в данное уравнение, даст выражение вида:

Поскольку 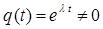 , то из последнего уравнения следует, что:
, то из последнего уравнения следует, что:

такое уравнение относительно , называется характеристическим уравнением, отвечающим соответствующему дифференциальному уравнению:
 ,
,
а функция является стандартной подстановкой (частным решением дифференциального уравнения), с помощью, которой решается исходное дифференциальное уравнение. При этом, будет частным решением соответствующего уравнения лишь в том случае, если - корень характеристического уравнения. Таким образом, для решения искомого дифференциального уравнения необходимо составить и решить характеристическое уравнение. Чтобы составить характеристическое уравнение, нужно в данном дифференциальном уравнении  заменить единицей, а производную искомой функции – величиной в степени, равной порядку производной
заменить единицей, а производную искомой функции – величиной в степени, равной порядку производной  соответственно. При этом следует различать следующие три возможные случая для корней
соответственно. При этом следует различать следующие три возможные случая для корней  и
и  характеристического уравнения (предполагается, что коэффициенты M и N – действительные числа):
характеристического уравнения (предполагается, что коэффициенты M и N – действительные числа):
· и – корни уравнения действительные и различные числа, т.е.  .
.
· и – корни уравнения действительные и равные числа, т.е.  .
.
· и – корни уравнения комплексные сопряжённые числа:  и
и
 .
.
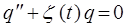
Учитывая, что:

представим уравнение:
к виду:
Запишем теперь, в соответствии с правилами указанными выше, характеристическое уравнение:
 ,
, 

имеем соответственно два независимых решения искомого дифференциального уравнения. Таким образом, решив характеристическое уравнение, мы приходим к выводу о том, что корни уравнения – комплексно сопряжённые числа (третий из выше перечисленных случаев). В соответствии с приведенной выше теоремой об общем решении дифференциального уравнения, в независимости от того являются ли корни характеристического уравнения действительными или комплексными сопряжёнными числами, общее решение имеет вид

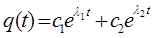
Поскольку в нашем случае, корни характеристического уравнения являются комплексными сопряжёнными числами, т.е. имеет место два независимых решения:

общее решение можно записать в виде:

здесь  и
и  – произвольные комплексные постоянные. Учитывая, что:
– произвольные комплексные постоянные. Учитывая, что:

тогда на основании выше приведенных выкладок можно заключить, что:

Учитывая, что общее решение дифференциального уравнения строится как суперпозиция частных решений:
будем иметь соответственно:

здесь частными являются решения вида:

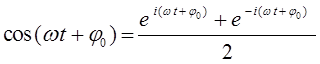
на основании известных из курса линейной алгебры формул Эйлера:


откуда следует, что:

а также принимая, что:
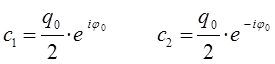
получим соответственно уравнение вида:



поскольку по определению:

тогда выражение вида:
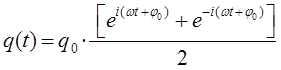
очевидно, может быть представлено к виду:

Если же принять, что:

тогда будем иметь соответственно:



поскольку:
тогда выражение:
очевидно, может быть представлено к виду:

Таким образом, путём соответствующих преобразований, на основании общего решения дифференциального уравнения:

мы пришли к двум эквивалентным друг другу решениям дифференциального уравнения, записанным в тригонометрической формах:

Дата добавления: 2015-03-14; просмотров: 874;