Динамические переменные и интегралы движения.
В гамильтоновой механике задание координат  и импульсов
и импульсов  в каждый момент времени
в каждый момент времени  однозначно характеризует состояние системы. По этой причине переменные
однозначно характеризует состояние системы. По этой причине переменные  – основные динамические величины механической системы. Наряду с ними возникает необходимость в использовании различных функций от
– основные динамические величины механической системы. Наряду с ними возникает необходимость в использовании различных функций от  и
и  , отражающих детали динамики системы. В общем случае динамическая величина
, отражающих детали динамики системы. В общем случае динамическая величина  – это некоторая функция обобщённых координат и импульсов , а также времени :
– это некоторая функция обобщённых координат и импульсов , а также времени :

или сокращённо:
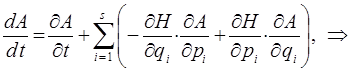
Динамические величины имеют неформальный смысл лишь на траектории движения. Чтобы понять зависимость динамической величины от времени , исследуем её полную производную по времени  . Итак, пускай у нас имеется некоторая динамическая переменная , описывающая систему с s степенями свободы, при этом:
. Итак, пускай у нас имеется некоторая динамическая переменная , описывающая систему с s степенями свободы, при этом:

Очевидно:
или
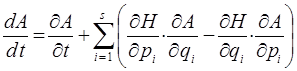
учитывая, что на траектории движения в механике выполняется:
имеем соответственно:
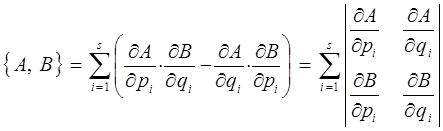
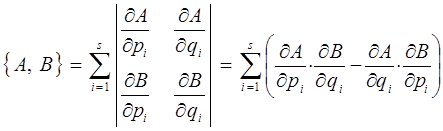
При выводе данного уравнения, автоматически появилась характерная конструкция, называемая скобкой Пуассона. В общем случае, для двух динамических переменных A и B, её обозначают через  и определяют выражением вида:
и определяют выражением вида:
тогда с учётом того, что:
выражение вида:
может быть переписано и представлено к виду:
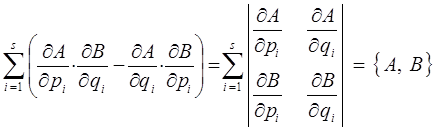
Следовательно, имеет место общая механическая формула:
позволяющая записать выражение:
в более компактной форме, используя скобки Пуассона. Последние, в свою очередь, обладают следующими основными свойствами:
1. Если динамические переменные A и B в скобке Пуассона поменять местами, то скобка изменит свой знак на противоположный (антисимметричность скобок):

и как следствие:

2. Если одна из динамических величин (переменных) в скобках Пуассона является величиной постоянной (например, переменная C), то соответствующая скобка будет также равна нулю, что аналогично правилам дифференцирования:

и аналогично:

отождествляя с операцией дифференцирования по B:
получаем, что:
формально эквивалентно операции:
3. Если одна из динамических переменных в скобке Пуассона представляется суммой двух динамических переменных, например:

то вследствие линейности скобок Пуассона оказывается справедливым:

4. Между скобками Пуассона, полученными циклической перестановкой трёх динамических переменных A, B и C, существует соотношение:

называемое также тождеством Якоби.
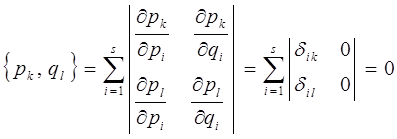
5. В качестве динамических переменных в общем случае могут выступать разные величины. Так, если в качестве последних выступают обобщённые координаты и импульсы , то построенные на их основе скобки Пуассона, будут равны:

и соответственно:
где  – символ Кронекера. По определению:
– символ Кронекера. По определению:
Для того чтобы убедиться в справедливости наших рассуждений. Найдём  , где
, где  . Учитывая, что импульсы явно не зависят от обобщённых координат и для всех i, k:
. Учитывая, что импульсы явно не зависят от обобщённых координат и для всех i, k:

Кроме того, очевидно, что:
Последний факт записываем с помощью так называемого δ-символа Кронекера:
т.е.  , а в остальных случаях – нулю. Это в свою очередь означает, что вместо:
, а в остальных случаях – нулю. Это в свою очередь означает, что вместо:
необходимо писать:

В расчётах необходимо иметь ввиду следующее свойство сумм с δ-символом:
Иными словами, из всей суммы по i, δ-символ вырезает лишь одно значение –  , когда в процессе суммирования текущий индекс i достигнет значения внешнего индекса k. Учитывая, что:
, когда в процессе суммирования текущий индекс i достигнет значения внешнего индекса k. Учитывая, что:
имеем:
аналогично проверяется:

при этом необходимо отметить, что скобка Пуассона, включающая в себя координату и импульс, не всегда равна нулю.
Действительно, имеем:
где учтено:
и таким образом, для канонически сопряжённых величин имеем:
Если в качестве динамической переменной выступает функция Гамильтона H, то для консервативной системы из выражения:
следует, что:
Это в свою очередь означает, что функция Гамильтона H является величиной постоянной. Уравнения Гамильтона, записанные через скобки Пуассона, приобретают симметричный вид:
Скобки Пуассона не упрощают решения уравнений движения, однако оказалось, что именно они приводят к математическому аппарату, который используется для формулировки основных теоретических положений квантовой механики. Введенные нами выше понятия динамической переменной неразрывно связаны с таким понятием как интеграл движения. По определению динамическая величина А есть интеграл движения, если А сохраняется на протяжении всей траектории движения. Это в свою очередь означает, что такая величина не зависит от времени и оказывается справедливым механическое уравнение:

Поскольку во многих случаях А явно от времени не зависит:

тогда уравнение:
при условии, что:
может быть сведено к виду:
Это в свою очередь означает, что величину А можно рассматривать в качестве интеграла движения только при условии исчезновения скобки Пуассона  величины А и гамильтониана H. Для случая консервативных систем уравнение:
величины А и гамильтониана H. Для случая консервативных систем уравнение:

может быть представлено к виду:
что полностью воспроизводит закон сохранения энергии.
Дата добавления: 2015-03-14; просмотров: 1315;