Электропривод с машиной двойного питания.
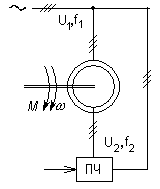
Каскадные схемы предполагали управление координатами в цепи выпрямленного тока ротора. Вместе с тем существует и другая возможность - включение в цепь ротора преобразователя частоты (рис. 4.12,а). Структуры такого типа называют электроприводами с машинами двойного питания.
а) б)
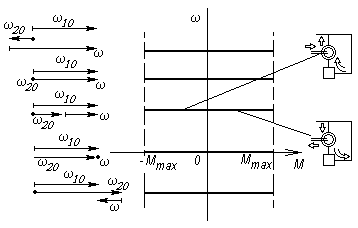
Рис. 4.12. Схема (а) и характеристики (б) машины двойного питания
Поскольку при преобразовании энергии поля должны быть неподвижны относительно друг друга, должны выдерживаться следующие соотношения скоростей и частот:
 ; (4.19)
; (4.19)
f1 = f2 + f, (4.20)
где  - угловые скорости поля статора и поля ротора относительно соответственно статора и ротора; f1, f2 - частоты напряжения статора и ротора; f - частота, соответствующая угловой скорости ротора.
- угловые скорости поля статора и поля ротора относительно соответственно статора и ротора; f1, f2 - частоты напряжения статора и ротора; f - частота, соответствующая угловой скорости ротора.
Из (4.19) и (4.20) следуют богатые возможности управления скоростью ротора  : действительно, фиксируя f1, т.е.
: действительно, фиксируя f1, т.е.  , и управляя
, и управляя  , можно получать любые f и теоретически в неограниченном диапазоне (рис. 4.12,б); знаком “-” для f2 и
, можно получать любые f и теоретически в неограниченном диапазоне (рис. 4.12,б); знаком “-” для f2 и  обозначено изменение чередования фаз, чему соответствует изменение направления вращения поля.
обозначено изменение чередования фаз, чему соответствует изменение направления вращения поля.
Если частота f2 задается независимо от , механические характеристики представляются горизонтальными линиями (рис. 4.12,б), и в этом смысле машина подобна синхронной, которую мы рассмотрим далее. При изменении момента нагрузки меняется угол q между осями полей статора и ротора - как бы по-разному растягивается “магнитная пружина”. Наибольший момент Мmax определяется предельной силой магнитной связи статора и ротора - при превышении моментом нагрузки этой величины нарушаются условия (4.19), “магнитная пружина” рвется, поля перестают быть неподвижными относительно друг друга, машина не развивает среднего момента и либо останавливается при реактивном Мс, либо вращается со скоростью, определяемой активным Мс; это, разумеется, аварийный режим.
Возможно и другое построение системы: частота f2 может быть связана со скоростью ротора. В этом случае характеристики будут похожи на характеристики машины постоянного тока - будут иметь наклон, который можно трактовать как скольжение; видом связи можно формировать характеристики любого вида. 
В рассматриваемой системе очень многообразны энергетические режимы - они определяются соотношением частот f1 и f2, относительным направлением вращения полей, направлением действия (знаком) момента сопротивления. На рис. 4.12,б в качестве примера приведена диаграмма, иллюстрирующая режимы на одной из характеристик в предположении, что потери малы и не учитываются.
Дата добавления: 2019-10-16; просмотров: 960;