Бесконтактная система управления электроприводом грузовой лебедки
Схема управления состоит из силовой части ( левая половина схемы ) и собственно схемы управления ( правая половина ) ( рис. 198 )..
Блоки контроля исправности тиристоров для упрощения объяснения на схеме не показаны.
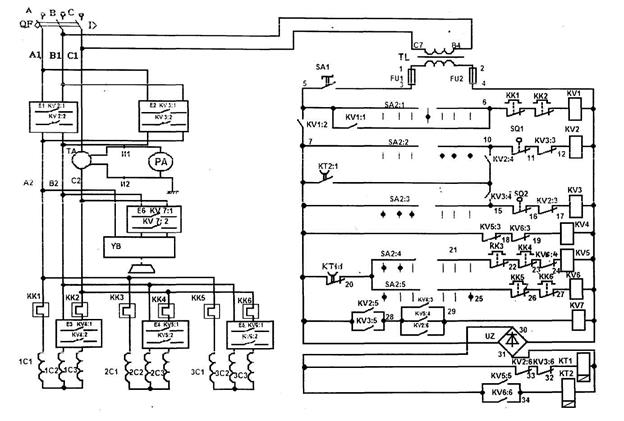
Рис. 198. Принципиальная схема управления электроприводом лебедки
Силовая частьсхемы состоит из следующих элементов:
1. автоматического выключателя QF, предназначенного для отключения электро-
двигателя от питающей сети при коротком замыкании в любой из трех обмоток статора –
обмотки первой скорости 1С1, второй 2С1 или третьей 3С1;
2. шести тиристорных контакторов:
Е1 – контактор «Подъем»;
Е2 – контактор «Спуск»;
Е3 - контактор 1-й скорости;
Е4 - контактор 2-й скорости;
Е5 - контактор 3-й скорости;
Е6 – тормозной контактор;
3. трансформатора тока ТА, во вторичную обмотку которого включен амперметр
рА, встроенный в верхнюю часть тумбы командоконтроллера.
4. катушки электромагнитного тормоза YB;
5. нагревательных элементов КК1...КК6 тепловых реле.
6. асинхронного двигателя с короткозамкнутым ротором и тремя обмотками на ста-
торе - 1С1, 2С1, 3С1.
Схема управлениясостоит из следующих элементов:
1. понижающего трансформатора ТL напряжением 380 / 27 В, предназначенного
для питания катушек промежуточных реле KV1…KV7 и реле времени КТ1, КТ2;
2. командоконтроллера, имеющего 5 контактов SА2:1…SA2:5.
3. реле напряжения KV1;
4. реверсивного реле КV2 «Подъем»;
5. реверсивного реле КV3 «Спуск»;
6. реле 1-й скорости КV4;
7. реле 2-й скорости КV5;
8. реле 3-й скорости КV6;
9. тормозного реле КV7;
10. реле времени КТ1, для задержки перехода двигателя с 1-й скорости на 2-ю;
11. реле времени ( тормозное) КТ2, для перевода двигателя в режим рекуператив
ного торможения;
12. конечного выключателя SQ1, контролирующего длину троса при его намотке на барабан;
13 конечного выключателя SQ2, контролирующего длину троса при его смотке с
барабана;
14. выпрямительного мостика UZ, для питания постоянным током катушек реле
времени КТ1 и КТ2 .
Подготовка схемы к работе
Для подготовки схемы к работе включают:
1. автоматический выключатель QF силовой части схемы на групповом распредели
тельном щите лебёдок внутри стандерса;
2. аварийный выключатель SA1 на тумбе командоконтроллера лебедки.
Исходное состояние
В нулевом положении замкнут контакт SA2:1 командоконтроллера.
Через SA2:1 получает питание реле напряжения KV1, которое замыкает контакты
KV1:1 и KV1:2.
Контакт KV1:1 шунтирует SA2:1, а через KV1:2 подаётся питание на остальную
часть схемы управления.
В результате через контакты KV5:3 и KV6:3 включается реле 1-й скорости KV4, а
через выпрямительный мостик UZ и контакты KV2:6 и KV3:6 включается реле времени КТ1.
Реле KV4 замыкает контакты KV4:1, KV4:2 в тиристорном коммутаторе 1-й скоро-
сти ЕЗ, а также KV4:3 в цепи катушки реле тормоза KV7.
Реле КТ1 мгновенно размыкает контакт КТ1:1 в цепи катушек реле 2-й и 3-й скоро
сти KV5 и KV6, тем самым препятствуя их включению без выдержки времени.
Таким образом, в нулевом положении включены реле KV1, KV4 и КТ1.
Схема управления симметрична, рассмотрим работу схемы в направлении «Подъ-
ём».
Первая скорость
При переводе рукоятки командоконтроллера в 1-е положение «Подъём» размыкает
ся контакт SA2:1 и замыкается SA2:2.
Несмотря на размыкание SA2:1, цепь катушки реле напряжения KV1 сохраняется
через собственный контакт KV:1 (самоблокировка).
Через SA2:2 включается реверсивное реле KV2 «Подъём». Оно замыкает контакты
KV2:1 и KV2:2 в тиристорном коммутаторе Е1 «Подъём» и KV2:5 в цепи катушки реле тормоза KV7.
Реле RV7 включается и замыкает контакты KV7:1, KV7:2 в тиристорном коммута-
торе Е6 тормоза YB.
Двигатель растормаживается и работает на 1 -и скорости.
Кроме того, замыкается контакт KV2:4, предварительно подготавливая цепь управ
ления рекуперативным торможением.
Одновременно реле KV2 размыкает контакт KV2:6 в цепи катушки реле времени
КТ1, отключая его. Контакт КТ1:1 замыкается с выдержкой времени 0,5 с, тем самым за-
держивая переход с 1-й: скорости на 2-ю на это время.
Таким образом, в 1-м положении рукоятки включены реле напряжения KV1, ревер-
сивное KV2 и тормозное KV7.
Вторая скорость
При переводе рукоятки ко\(андоконтроллера во 2-е положение замыкается контакт
SA2:4.
Через него и контакт КТ1:1 , замкнувшийся с выдержкой времени 0,5 с, включается
реле 2-й скорости KV5.
Последнее сначала размыкает контакты KV5:3, отключая реле 1-й скорости KV3, и
замыкает контакты KV5:1, KV5:2 в тиристорном коммутаторе 2-й скорости Е4. Двигатель переходит с 1-й скорости на 2-ю.
Одновременно замыкается контакт KV5:5, включая реле времени рекуперативного
торможения КТ2. Реле КТ2 мгновенно замыкает контакт КТ2:1, в результате параллельно контакту SA2:2 подключается цепь рекуперативного торможения, включающая последова
тельно соединенные контакты КТ2:1 иКУ2:4.
Таким образом, во 2-м положении включены реле: реверсивное KV2 «Подъем», 2-й
скорости KV5, тормозное KV7 и времени КТ2.
Третья скорость
При переводе рукоятки в 3-е положение замыкается контакт SA2:5.
Через него включается реле 3-й скорости KV6. Оно сначала размыкает контакт
KV6:4, отключая реле 2-й скорости KV5, а затем замыкает контакты KV6:1, KV6:2 в цепи тиристорного коммутатора Е5. Двигатель переходит на 3-ю скорость.
Кроме того, замыкается контакт KV6:6, оставляя включённым реле КТ2.
Таким образом, в 3-м положении включены реле: реверсивное KV2, 3-й скорости
KV6, тормозное KV7 и времени КТ2.
Дата добавления: 2017-08-01; просмотров: 685;