Синхронный двигатель. Другие виды электроприводов
Статор синхронной машины очень похож на статор асинхронной и используется для создания вращающегося магнитного поля. Ротор выполнен в виде явнополюсного или неявнополюсного электромагнита, питаемого через кольца и щетки от источника постоянного напряжения, или в виде конструкции из постоянных магнитов. Магнит увлекается полем, движется синхронно с ним, связанный “магнитной пружиной”, отставая в двигательном режиме или опережая в тормозном на угол q, зависящий от электромагнитного момента.
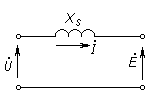
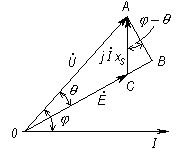
Фаза статора неявнополюсной синхронной машины (р=1), если пренебречь активным сопротивлением обмотки, может быть представлена схемой замещения на рис. 4.13,а. Синусоидальное напряжение источника питания U уравновесится частично ЭДС Е, наведенной в неподвижной обмотке вращающимся магнитом - ротором, и определит вместе с реактивным сопротивлением Хs ток I. Векторная диаграмма, отражающая указанные процессы, показана на рис. 4.13,б.
а) б) в)

г) д)
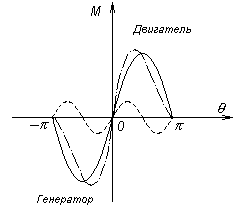
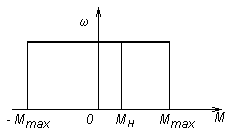
Рис. 4.13. Схема замещения (а), векторная диаграмма (б) и характеристики (в), (г) и (д) синхронной машины
Для синхронной машины очень важен угол q между  и
и  или, что то же, между осью поля статора и осью ротора - он, как отмечалось, характеризует степень растянутости “магнитной пружины”.
или, что то же, между осью поля статора и осью ротора - он, как отмечалось, характеризует степень растянутости “магнитной пружины”.
Основные соотношения между электрическими и механическими величинами найдем, пользуясь формулой
 (4.21)
(4.21)
и векторной диаграммой на рис. 4.13,б, из которой следует, что
 .
.
Из вспомогательного треугольника АВС определим
 ,
,
т.е. получим
 ,
,
и окончательно найдем
 . (4.22)
. (4.22)
Таким образом, электромагнитный момент синхронной машины зависит от q, причем для малых q можно принять
М » сэмq . (4.22,а)
Максимальный момент Мmax при постоянном напряжении и частоте пропорционален ЭДС, т.е. в линейном приближении току возбуждения машины; для нормальных машин Мmax/Мн = 2 - 2,5.
Если машина имеет явнополюсной ротор, то к моменту, определенному по (4.22), добавится еще одна - реактивная составляющая, пропорциональная sin 2q (пунктир на рис. 4.13,в). Общий вид моментной характеристики синхронной машины показан на рис. 4.13,в штрих-пунктирной линией, механическая характеристика изображена на рис. 4.13,г.
Синхронная машина имеет характерную зависимость тока статора I от тока возбуждения Iв - так называемые V-образные кривые (рис. 4.13,д). Их форма связана с тем, что при изменении тока возбуждения меняются реактивная составляющая тока статора и её знак.
Электропривод с синхронной машиной до недавнего времени был неуправляемым, имел тяжелый пуск - для него на роторе размещалась специальная пусковая “беличья клетка” (асинхронный пуск). Появление современных электронных преобразователей частоты радикально изменило эту ситуацию: появились маломощные частотно-управляемые электроприводы на основе синхронных машин с постоянными магнитами, электроприводы с синхронными реактивными машинами. Электронные коммутаторы, позволяющие бесконтактно переключать обмотки машины, стали основным элементом так называемых бесконтактных двигателей постоянного тока и т.п.
Особое место в ряду множества новых электроприводов, обязанных своим появлением успехам электронной техники, занимает шаговый электропривод, осуществляющий преобразование электрического сигнала (кода, цифры) в дозированное угловое или линейное перемещение, а также силовая версия этого электропривода - вентильно-индукторный электропривод, получивший в 90-е годы интенсивное развитие.
В отличие от подавляющего большинства традиционных электрических машин действие вентильно-индукторной машины основано на притяжении ферромагнитного тела к возбужденному электромагниту - индуктору. Машина ВИМ (рис. 4.14) состоит из n-полюсного статора, несущего катушки, и m-полюсного пассивного ротора, при чем n ¹ m. Электронный коммутатор К подключает по сигналу датчика положения Д катушки - фазы к источнику питания - выпрямителю В или батарее. При возбужденной фазе А-Х (рис. 4.14) два полюса ротора притянуты к соответствующим полюсам статора. При размыкании А-Х и подключении к источнику питания фазы B-Y, т.е. при перемещении поля по часовой стрелке ближайшие полюса ротора притянутся к вновь возбужденной фазе, и ротор повернется на некоторый угол против часовой стрелки. Повторение переключений приведет к непрерывному вращению ротора со скоростью, определяемой частотой переключений. На момент, соответствующий каждой скорости, будут влиять как ток, протекающий по обмоткам включенной фазы, так и углы включения и отключения фазы.
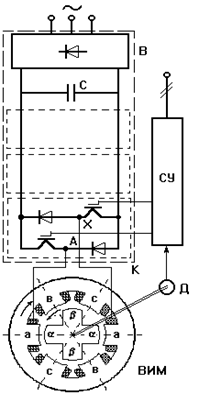
Рис. 4.14. Схема вентильно-индукторного электропривода
Из изложенного принципа действия вентильно-индукторной машины следует, что удовлетворительная работа привода возможна лишь при весьма тонком управлении, включающем формирование импульсов тока. При таком управлении, осуществляемом специализированной схемой управления СУ вентильно-индукторный электропривод превосходит по основным показателям традиционный частотно-управляемый асинхронный электропривод.
В настоящее время - конец 90-х годов - теория и практика вентильно-индукторного электропривода находятся еще в стадии разработки, однако уже полученные результаты позволяют надеяться, что этот новый тип электропривода займет достойное место в семействе регулируемых электроприводов благодаря предельной простоте, низкой стоимости и высокой надежности машины, широким функциональным возможностям и хорошим энергетическим показателям.
Дата добавления: 2019-10-16; просмотров: 652;