Основная формула теории регулирования
Методы регулирования основаны на использовании обратной связи. Рассмотрим простую систему регулирования, имеющую один вход X и выход Y(рис.3.4).
Имеется некоторая регулируемая система S, которая подвергается определенным воздействиям X, дающим в итоге требуемый результат Y.
Результат воздействует на регулятор R, который, в свою очередь, воздействует на регулируемую систему. Комплекс регулируемой системы и регулятора составляет систему регулирования. Преобразование состояния входа X в состояние выхода Y формально можно отобразить как: Y = SX. Этот способ отображения соответствует разомкнутому контуру управления. Как показано на рис. 3.4, состояние выхода регулируемой системы S передается на вход регулятора R, выходом которого является величина АХ. Это состояние прибавляется к состоянию входа системы S: X + ΔХ.
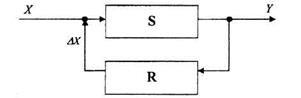
Рисунок 3.4 Система регулирования
Предположим, что регулируемая система работает как пропорциональный преобразователь: Y=SX.
При S > 1 пропорциональное преобразование называется усилением, а при S < 1 - ослаблением.
Показатель S=  называется пропускной способностью регулируемой системы.
называется пропускной способностью регулируемой системы.
Предположим также, что регулятор тоже осуществляет пропорциональное преобразование, а его пропускная способность равна R. Тогда ΔХ = RY. С учетом воздействия регулятора состояние выхода регулируемой системы определится как:
Y = S(X + ΔХ) = S(X + RY) = SX + SRY.
Отсюда
 . (3.15)
. (3.15)
Выражение (3.15) является основной формулой теории регулирования. Приведенная формула дает возможность рассчитать необходимое значение входной величины, чтобы при заданных параметрах системы S и R получить на выходе искомый результат У. Принимая во внимание то, что  , выражение
, выражение  называется пропускной способностью системы регулирования. Из основной формулы теории регулирования вытекает специфическая роль регулятора. При R = 0 пропускная способность регулируемой системы была бы равна S: Y = SX. Наличие регулятора требует введения множителя
называется пропускной способностью системы регулирования. Из основной формулы теории регулирования вытекает специфическая роль регулятора. При R = 0 пропускная способность регулируемой системы была бы равна S: Y = SX. Наличие регулятора требует введения множителя  , который характеризует его действие. Сомножитель выражает действие обратной связи в системе регулирования, и его называют оператором или мультипликатором обратной связи.
, который характеризует его действие. Сомножитель выражает действие обратной связи в системе регулирования, и его называют оператором или мультипликатором обратной связи.
Регулирование как функция управления получила широкое применение в исследовании экономических систем управления.
Основные свойства и характеристики регулируемых систем изучаются технической кибернетикой в разделе теории автоматического управления.
Дата добавления: 2019-07-26; просмотров: 610;