Радиолокационные средства наблюдения
Для решения задач, стоящих перед службой УВД, требуется обеспечить в пунктах управления полетами сбор разнообразной информации о параметрах движения ВС.
Основным оборудованием группы радиотехнических средств УВД, предназначенных для получения и отображения информации о воздушной обстановке, являются радиолокаторы различного назначения.
3.9.1. Классификация РЛС УВД
Средства наблюдения принято классифицировать по следующим признакам:
а) по принципу взаимодействия с целями различают:
— первичные РЛС,
— вторичные РЛС,
— вторичные РЛС с адресным запросом;
б) по характеру обзора воздушного пространства:
— кругового обзора,
— секторного обзора,
— программированного обзора;
в) по способу сканирования диаграммы направленности антенны:
— с механическим вращением антенны,
— с электронным управлением положением, формируемой диаграммы направленности,
— со смешанным управлением;
г) по количеству измеряемых координат:
— двухкоординатные,
— трехкоординатные;
д) по назначению в системе УВД:
— трассовые,
— аэродромные,
— посадочные.
С другой стороны все первичные РЛС иногда объединяют в следующие группы:
ОРЛ-Т — трассовые обзорные РЛС (Вариант А) с максимальной дальностью обнаружения rmax = 400км;
ОРЛ-ТА — трассово-аэроузловые (Вариант Б) с rmax = 250км;
ОРЛ-А — аэродромные обзорные РЛС с rmax= 150км (Вариант В-1), с
rmax = 80км (Вариант В-2), с rmax = 46км (Вариант В-3);
ПРЛ — посадочные РЛС;
РЛ ОЛП — РЛС обзора летного поля;
МРЛ — метеорологические;
ОПРЛ — комбинированные или обзорно-посадочные.
Следует отметить, что предлагаемое деление в некоторой степени условно. Иногда, в зависимости от особенностей использования, обзорные РЛС могут быть отнесены к аэроузловым или аэродромным или к трассовым или к аэродромным. Тоже можно сказать и о вторичных РЛС (ВРЛ), особенно об их встроенных вариантах, которые в зависимости от назначения первичных каналов РЛС, могут изменять свое на значение.
3.9. 2. Первичные РЛС обзора воздушного пространства (ПРЛС)
ПРЛС служат основным источником информации о динамической воздушной обстановке в определенной области пространства. Они предназначены для обнаружения ВС и определения азимутальных углов и дальностей до ВС. ПРЛС производят облучение всех объектов, попадающих в пределы их зоны обзора, и осуществляют прием сигналов, отраженных этим объектами. Анализ принятых сигналов позволяет получать всю необходимую информацию о движении ВС. Принцип функционирования ПРЛС аналогичен принципу функционирования обычной импульсной радиолокационной станции, хотя и имеет некоторые специфические особенности, обусловленные предъявляемыми требованиями, свойствами отражающих объектов и условиями применения.
Основные эксплуатационно-технические характеристики (ЭТХ)
К основным ЭТХ ПРЛС относятся зона обзора, разрешающая способность, точность, надежность, массово-габаритные характеристики.
Зона обзора (зона видимости) — область пространства, в пределах которой ПРЛС обеспечивает обнаружение ВС и определение их координат с требуемой
точностью и надежностью при заданной вероятности правильного обнаружения и допустимом уровне ложных тревог. Зона обзора характеризуется дальностью обнаружения и телесным углом, в пределах которого она достигается. Точнее говоря, зона обзора задается дальностью обнаружения, рассматриваемой в качестве функции угловых координат ВС (азимута и угла места) относительно точки размещения ПРЛС.
Дальность радиолокационного обнаружения зависит от мощности излучения ПРЛС, направленных свойств антенны, чувствительности приемника и отражающих свойств воздушных судов.
 rmax =
rmax =  , (1)
, (1)
где — rmax - максимальная дальность обнаружения; РПрд - мощность, излучаемая передатчиком ПРЛС; G - коэффициент направленного действия антенны; λ- длина волны, на которой работает ПРЛС; σц - эффективная площадь рассеяния, характеризует отражающие свойства объекта отражения; РПрмmin - чувствительность приемника, т.е. минимальная мощность отраженного сигнала на входе приемника ПРЛС, которая после обработки в нем, обеспечивает надежное воспроизведение отраженного сигнала на экране индикатора.
Выражение (1) показывает максимальную дальность действия ПРЛС в свободном пространстве и показывает, что для ощутимого увеличения дальности необходимо значительное увеличение РПрд, σц, G или уменьшение PПрм min и λ.
Однако на процесс радиолокационного наблюдения в значительной мере оказывает влияние земная поверхность. Отражаемые ею сигналы суммируются с прямыми сигналами, что приводит к интерференции прямых и отраженных полей. В общем случае мощность принимаемых отраженных сигналов отличается от мощности принимаемых сигналов в условиях свободного пространства
Р*Прм = РПрм· Ф4(β),
где - Ф(β) — интерференционный множитель.
Отсюда следует, что максимальная дальность радиолокационного наблюдения с учетом влияния земли определиться как
rmax з = rmax· Ф(β) (2).
Интерференционный множитель является функцией угла места. Максимальное и минимальное значение его равны: Фmax = 1 + ρ0; Фmin = 1 - ρ0, поэтому и максимальная дальность будет зависеть от угла места и изменяться в пределах от rmax·(1-ρ0) до rmax·(1+ρ0), где ρ0 - обобщенный коэффициент отражения. Это приводит к тому, что диаграмма излучения и зона обнаружения в вертикальной плоскости имеют лепестковый характер (рис.58).

Рис. 58. Форма ДНА с учетом влияния земной поверхности
Углы места, под которыми располагаются максимумы и минимумы диаграммы излучения, определяются как:
sinβn min = n· λ/2h; sinβn max = (2n+1) ·λ/4h (3),
где - h - высота подвеса антенны ПРЛС; λ - длина волны; n = 0,1,2,3,....
Отсюда следует, что угол места первого минимума β1 min = 0, а первый максимум ориентирован под углом места β1 max = λ/4h.
Из выражения (3) видно, что чем выше поднята антенна над землей, тем ближе к земле прижимается первый лепесток, количество лепестков увеличивается, а ширина их уменьшается.
Так как коэффициент ρ0 может принимать одно из значений в пределах 0… 1, то минимальное и максимальное значения интерференционного множителя Ф(β) при ρ0 = 1 равны соответственно 0 и 2. Максимальная дальность действия в направлениях βmax может возрастать в 2 раза по сравнению с rmax, определяемой выражением (1). Зато в направлениях βmin максимальная дальность действия уменьшается до нуля. Для уменьшения глубины провалов зоны видимости РЛС используются направленные в вертикальной плоскости антенны. Интерференционные явления особенно сильно проявляются в диапазоне метровых и дециметровых волн.
С учетом рассмотренных явлений диаграмма направленности антенны в вертикальной плоскости приобретает изрезанный многолепестковый характер (рис.).
Кривизна земной поверхности ограничивает rmax прямой видимости rпр. Полученное ранее выражение (2) может использоваться в том случае, когда rmax < rпр. Если же рассчитанная по этой формуле максимальная дальность действия окажется больше, чем rпр, то rmax = rпр. Затухание радиоволн в атмосфере может привести к уменьшению максимальной дальности РЛС. При использовании в РЛС радиоволн длиннее 10см даже при неблагоприятных метеоусловиях затухание их в атмосфере незначительно. По этой причине при определении rmax РЛС дециметрового и метрового диапазонов затухание можно не учитывать. Волны миллиметрового и сантиметрового диапазонов испытывают заметное затухание и при расчете rmax РЛС этих диапазонов его необходимо учитывать.
Минимальная дальность действия ПРЛС — это расстояние, ближе которого она не способна обнаруживать объекты. Она ограничивается длительностью зондирующих импульсов τ и временем восстановления приемного тракта с учетом инерционности антенного переключателя tв и определяется выражением
rmin = c·( τ+tв)/2.
Обычно rmin можно оценить величиной в несколько сотен метров. Для РЛС дальнего обнаружения такая величина не имеет большого значения. Для РЛ обзора летного поля и метеолокаторов этот параметр имеет существенное значение, и принимаются специальные меры по его уменьшению.
Пределы обзора по азимуту и углу места. Границы зоны обзора РЛС по угловым координатам в горизонтальной и вертикальной плоскостях определяются назначением и типом РЛС. Обзорные РЛС различного назначения, как правило, осуществляют круговой обзор в горизонтальной плоскости. В вертикальной плоскости зона обзора этих РЛС ограничивается сектором в несколько десятков градусов, а нижняя граница располагается под углом в десятые доли градуса относительно горизонта. Перед посадочными РЛС ставится задача обслуживать довольно ограниченный сектор пространства, и зона обзора этих РЛС ограничена по углу, как в горизонтальной, так и в вертикальной плоскости значениями 10…300.
Диаграмма видимости РЛС. Для грамотной эксплуатации РЛС необходимо знать зону ее действия. Поскольку зона обзора не является однородной, для ее характеристики следует задавать не одно значение максимальной дальности действия, а ряд значений для различных направлений в вертикальной плоскости или различных высот. Для наглядного представления зона обзора изображается графически. График зоны обзора называется диаграммой видимости, которая делит все пространство на две области. Область внутри диаграммы является частью пространства, в которой объекты наблюдаются с заданной вероятностью правильного обнаружения. В другой области пространства, находящейся вне диаграммы видимости объекты не обнаруживаются.
Для двухкоординатных РЛС диаграмма видимости строится в вертикальной плоскости и при этом наиболее часто используется прямоугольная система координат высота - наклонная дальность (рис.59).
В этой системе координат: — по горизонтальной оси откладывается наклонная дальность r; по вертикальной - приведенные высоты Нпр.
Приведенной высотой называется высота расположения объекта над плоскостью горизонта (или радиогоризонта, если учитывается рефракция радиоволн), проведенной из точки размещения РЛС:
Нпр = r·sinβ или Нпр = Н - r2/2Rэ,
где Rэ - эквивалентный радиус Земли (Rэ = 8500км).

Рис. 59. Диаграмма видимости РЛС в прямоугольной системе координат высота - дальность
1 - линии равных наклонных дальностей; 2 - диаграмма видимости; 3 - лини равных истинных высот; 4 - линии равных углов места; 5 - линии равных приведенных высот
Линии равных истинных высот в прямоугольной системе координат Нпр, r будут иметь вид парабол. Линии равных углов места β имеют вид прямых, проходящих через начало координат и точки с координатами r, Hпр. Особенностью и достоинством прямоугольной системы координат является
то , что область малых углов места, которая имеет наибольшее значение для РЛС большой дальности действия, представляется крупным планом. Максимальные дальности действия на заданных высотах определяются точками пересечения линий равных высот с диаграммой видимости, а точки пересечения этих линий с горизонтальной осью определяют дальность прямой видимости rпр.
Разрешающая способность по дальности определяется минимальным расстоянием Δrмежду двумя объектами, расположенными в одном радиальном направлении относительно РЛС, наблюдение которых на индикаторе может осуществляться раздельно. Разрешающая способность по дальности зависит от длительности зондирующего импульса τи ряда параметров индикатора:
Δr = c·τ /2 + dп ·M / Lр,
где dп - диаметр светового пятна на экране индикатора; Lр - длина линии развертки; М - масштаб развертки по дальности.
Первое слагаемое определяет потенциальную разрешающую способность РЛС по дальности, которая зависит только от длительности зондирующего импульса. Второе слагаемое представляет разрешающую способность индикатора. Соотношение между потенциальной разрешающей способностью и разрешающей способностью индикатора в различных типах РЛС может быть различным.
Разрешающая способность по азимуту определяется минимальным углом в горизонтальной плоскости Δαмежду направлениями на два равноудаленных от РЛС объекта, при котором на индикаторе они наблюдаются раздельно
Эта разрешающая способность
Δα = Θ + dп ·M / Lр·r,
где Θ - ширина диаграммы направленности антенны в горизонтальной плоскости.
Первый член правой части этой формулы определяет потенциальную разрешающую способность РЛС по азимуту, которая зависит только от ширины диаграммы направленности в горизонтальной плоскости. ЧЕМ уже антенный луч, тем выше разрешающая способность по углу. Второе слагаемое представляет разрешающую способность по азимуту индикаторного устройства РЛС. Она определяется теми же параметрами индикатора, что и разрешающая способность по дальности, но дополнительно зависит от расстояния до объектов. Чем ближе располагаются объекты от РЛС, тем хуже разрешающая способность по азимуту. Для достижения наибольшей разрешающей способности надо выбирать масштаб развертки так, чтобы отметки от объектов наблюдались в конце линии развертки.
Точность измерения координат.
Точность измерения дальности. Измерение дальности сопровождаются рядом погрешностей, которые вызываются следующими причинами: нестабильностью скорости распространения радиоволн и искривлением траектории их распространения в атмосфере земли (погрешности, вызываемые этими причинами, называются погрешностями распространения); влиянием шумовых и других помех, воздействующих на РЛС (шумовые погрешности); несовершенством РЛС как технического устройства (инструментальные погрешности); влиянием отражающих свойств реальных целей, состоящих из большого числа элементарных отражателей (погрешности цели). Для РЛС, имеющих в качестве выходных устройств электронно-лучевые индикаторы, основное значение имеют инструментальные и в некоторых случаях шумовые погрешности.
К инструментальным погрешностям относятся погрешности калибровки и градуировки, отсчета, интерполяции и т.п. ОНИ полностью определяются устройством конкретной РЛС, многие из них можно найти только экспериментально. Среди инструментальных погрешностей следует выделить погрешность отсчета дальности, которая в известной степени определяется квалификацией оператора. В большинстве РЛС определение дальности производится по индикатору с помощью масштабных меток дальности. Оператор на глаз определяет положение отметки цели между метками дальности при этом СКП отсчета
σr0 = (0,05...0,1)rм,
где r - расстояние между соседними масштабными метками дальности.
Опыт показывает, что средние квадратические значения погрешностей измерения дальности (СКП) оказываются равными: для трассовых ПРЛС — 0,01r, для аэродромных ПРЛС — 0,03r или 150 м (большая из указанных величин). Таким образом, СКП определения линии положения с помощью расовых ПРЛС равна 3,4 км на дальности 340 км и 0,5 км на дальности 50 км. СКП определения дальности с помощью аэродромных ПРЛС составляет 4,5 км на дальности 150 км и 1,5 км на дальности 50 км.
Точность измерения угловых координат. НА точность определения угловых координат в основном оказывают влияние инструментальные погрешности. К ним относятся погрешности формирования угловой развертки индикатора, образующиеся вследствие погрешностей синхронно-следящей системы, люфтов в механических редукторах, несовпадения оси антенны с осью симметрии луча антенны, погрешности формирования азимутальных меток и погрешности отсчета угловой координаты на индикаторе. СКП отсчета азимута по индикатору зависит от углового размера отметки объекта, который примерно равен ширине ДНА Θ, и от углового интервала между азимутальными метками αм,т.е.
σα0 = (0,05…0,1)  .
.
СКП определения азимута для трассовых ПРЛС равна 0,50, для аэродромных - 20. Соответствующие значения СКП определения линии положения на удалениях 340 км и 50 км для трассовых ПРЛС будут 3,4 км и 0,5 км, для аэродромных - 6 км на дальности 150 км и 2 км - на удалении 50 км.
Следует отметить, что точность определения места ВС с помощью ПРЛС зависит, прежде всего, от дальности до него и оценивается погрешностями, СКП которых имеет порядок единиц километров.
Из приводимых данных видно, что ПРЛС уступают по точности системам ближней навигации и значительно менее точны, чем спутниковые системы радионавигации.
Защита ПРЛС от помех
НА работу ПРЛС существенное влияние оказывают мешающие сигналы различного происхождения, называемыми помехами. В частности, кроме полезных сигналов, отражаемых ВС, возникают мешающие сигналы, появляющиеся из-за отражений от подстилающей поверхности, местных предметов и метеообразований, причем уровень этих сигналов значительно выше уровня полезного сигнала, так как создающие их объекты расположены вблизи от ПРЛС. Сигналы из-за мешающих отражений называются пассивными помехами. На работу ПРЛС оказывают мешающее воздействие работа сторонних РЛС и помехи индустриального и атмосферного происхождения. Помехи указанных видов называются активными. Помехи скрывают слабый полезный сигнал, либо создают фон, препятствующий его обнаружению и проведению измерений. Поэтому возникает необходимость реализаций мероприятий по защите ПРЛС от помех.
Защита от помех основывается на выявлении отличий параметров мешающих сигналов от полезных и разделении (селектировании) полезных сигналов и помех в интересах подавления. Рассмотрим основные методы защиты ПРЛС от помех.
Селекция движущихся целей (СДЦ) позволяет ослабить влияние отражений от подстилающей поверхности, местных предметов и облачных образований. Она состоит в разделении сигналов от ВС и неподвижных объектов из-за различия частот колебаний, отраженных этими объектами. Различие частот обусловлено доплеровским эффектом, который проявляется в том, что если расстояние между объектом отражения и ПРЛС изменяется, то частота сигнала принятого (отраженного) от такого объекта будет отличаться от частоты сигналов, излучаемых ПРЛС. Разница частот (доплеровский сдвиг) пропорциональна радиальной скорости движения отражающего объекта и обратно пропорциональна длине волны, на которой ведется излучение
FД = -  /λ.
/λ.
Следовательно, доплеровский сдвиг отличен от нуля при отражении от объектов, движущихся и имеющих ≠ 0, и равен 0 при отражении от неподвижных образований или объектов, движущихся по круговой траектории относительно ПРЛС. При этом в случае приближения ВС < 0 и FД > 0, в случае удаления знак доплеровского сдвига меняется на противоположный, доплеровский сдвиг отсутствует при отражении от подстилающей поверхности и близок к нулю — при отражении от медленно движущихся облаков.
В ПРЛС используется импульсный режим излучения, поэтому доплеровский сдвиг будет проявляться в изменении амплитуды импульсных сигналов, получаемых в результате преобразования в специальной аппаратуре СДЦ, которая входит в состав ПРЛС. При приеме пассивной помехи эти сигналы имеют постоянную амплитуду, поскольку FД = 0 (рис.60,а2).
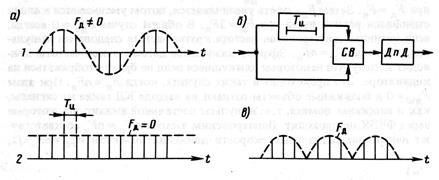
Рис. 60. Временные диаграммы процессов в аппаратуре СДЦ:
а - временные диаграммы отраженных сигналов после преобразования: 1 - полезный сигнал; 2 - пассивная помеха; б - упрощенная схема ФЧПК; в - форма полезного сигнала на выходе ФЧПК
В том случае, когда принимается полезный сигнал, импульсные сигналы будут иметь переменную амплитуду, изменяющуюся по закону FД (рис.60,а1). Важным элементом аппаратуры СДЦ является фильтр ЧПК, который не должен пропускать импульсы пассивной помехи. Этот фильтр (рис.60,б) состоит из схемы задержки на время, равное периоду повторения импульсов Ти, схемы вычитания СВ и двухполупериодного выпрямителя - детектора ДпД. Отраженные импульсные сигналы после преобразования поступают на СВ непосредственно и через схему задержки. Это значит, что в СВ каждый импульс сравнивается по амплитуде с предшествующим импульсом. Если на фильтр поступают импульсы постоянной амплитуды (пассивная помеха), то в СВ импульсы компенсируются и на ее выходе сигнал отсутствует, т.е.пассивная помеха на индикатор не поступает. Если на фильтр поступают импульсы с переменной амплитудой (полезный сигнал) то на выходе СВ образуются импульсы также переменной амплитуды, поскольку теперь каждый импульс отличается по амплитуде от соседнего предшествующего импульса. Выпрямитель ДпД превращает разнополярные импульсы с выхода СВ в импульсы одной полярности (рис.60,в), которые подаются на индикатор и создают отметки ВС. Таким образом, в результате работы аппаратуры СДЦ на индикатор должны поступать только полезные сигналы, отраженные движущимися объектами, а пассивная помеха не проходит через фильтр ЧПК.
Работа РЛС с СДЦ имеет некоторые особенности. Огибающая последовательности импульсов, поступающих на схему ЧПК имеет истинную доплеровскую частоту FД только в том случае, когда частота повторения зондирующих импульсов ПРЛС Fи ≥ 2FД. В противном случае частота
огибающей импульсов отличается от FД и называется кажущейся доплеровской частотой FДК. До тех пор, пока FД ≤ Fи/2, кажущаяся доплеровская частота равна истинной доплеровской частоте. При дальнейшем увеличении FД частота FДК начинает уменьшаться и достигает нуля при FД = Fи. В общем случае
FДК= 0 всегда, когда выполняется условие FД = n·Fи, где n=1,2,3... Указанное явление приводит к тому, что некоторые движущиеся цели не будут отображаться на индикаторе. Это происходит в тех случаях, когда FД = nFи. При этом FДК = 0 и подвижные объекты создают на выходе приемника ПРЛС такие же сигналы, как и пассивные помехи, т.е. импульсы постоянной амплитуды, которые не проходят через ФЧПК схемы СДЦ.
Доплеровским частотам FД = n·Fи соответствуют некоторые радиальные скорости движения объектов Wr c = n·F·λ/2, где n = 0,1,2,3 и т.д. Эти скорости называют слепыми, поскольку объекты с такими скоростями в РЛС с СДЦ не наблюдаются. Слепые скорости могут быть устранены при одновременной работе РЛС на нескольких различных частотах повторения импульсов или при использовании переменной Fи, что приводит к усложнению аппаратуры СДЦ и всей ПРЛС.
Другая особенность РЛС с СДЦ состоит в том, что такая станция не наблюдает объекты, движущиеся без изменения расстояния относительно РЛС или при малых скоростях изменения расстояния. Для того чтобы иметь возможность наблюдать такие объекты в ПРЛС имеется два режима работы: СДЦ и “пассивный”. В режиме “пассивный” аппаратура СДЦ отключается и на индикатор поступают все отраженные сигналы, в том числе и пассивная помеха.
Поляризационная селекция. Подавление пассивных помех, отраженных атмосферными образованиями, может быть достигнуто путем использования различия между полезными сигналами и помехами в их поляризации. Для этого в РЛС применяют радиоволны с круговой и эллиптической поляризациями, которые создаются с помощью специального устройства, расположенного в антенно-фидерном тракте. Излучаемая радиоволна с круговой поляризацией (рис.61,а) характеризуется тем, что вектор электрического поля Е вращается с постоянной угловой скоростью, равной несущей частоте сигнала ω,так что конец вектора описывает окружность. При отражении такой радиоволны от мелких частиц сферической формы ее поляризация остается круговой, но с противоположным направлением вращения вектора Е отр (рис.61,б). Такая радиоволна не проходит поляризационное устройство и поэтому пассивные помехи, созданные атмосферными образованиями, состоящими из мелких частиц сферической формы, не принимаются ПРЛС. При отражении радиоволн с круговой поляризацией от объектов неправильной геометрической формы (например, от ВС) ее поляризация становится эллиптической (рис.61,в), при которой вращающийся вектор Е отр изменяет свою величину и его конец описывает эллипс. Волна с такой поляризацией проходит через поляризационное устройство, но с ослаблением, и поэтому ПРЛС принимает полезные сигналы, хотя дальность действия уменьшается. Поляризационная селекция наиболее эффективно действует при подавлении пассивных помех, образованных туманом, дождем и водными облаками. Помехи, отраженные от снега, града и ледяных облаков, ослабляются в меньшей степени. Иногда больший эффект достигается при использовании излучаемых радиоволн эллиптической поляризацией

|
Селекция по частоте повторения импульсов используется для борьбы с несинхронными помехами, т. е. такими импульсными сигналами, частота повторения которых отличается от частоты повторения полезных сигналов. Схема селекции по частоте повторения, представляющая фильтр несинхронных помех, устанавливается между приемником и индикатором. В этом фильтре (рис.46,а) осуществляется задержка принимаемых сигналов точно на период следования и их сравнение с задержанными сигналами. Схема совпадения “И” вырабатывает сигнал на выходе, если поступающие на ее два входа импульсы совпадают во времени. Если принимаются сигналы, частота Fи которых равна частоте повторения зондирующих импульсов данной РЛС, то задержанные на время tз = Ти импульсы и незадержанные импульсы появляются в одно и то же время и со схемы “И” сигналы проходят на индикатор (рис.62,б). Таким образом, сигналы данной РЛС проходят через фильтр несинхронных помех. Когда РЛС принимает сигналы, период повторения которых Тп ≠ Tи, то задержанные на время tз = Ти импульсы уже не будут совпадать с незадержанными, и на выходе схемы “И” по этой причине никаких импульсов не будет (рис.62,в). Это значит, что несинхронная помеха не пропускается фильтром и не воздействует на индикатор.


Требования к основным характеристикам ПРЛС
ИКАО разработаны рекомендации на основные параметры различных видов обзорных РЛС (табл.11).
Таблица 11
| Параметр | РЛС | |
| Аэродромные | Трассовые | |
| Дальность действия, км (по ВС с ЭПР 15 м2) | ||
| Максимальная высота зоны действия, м | ||
| Пределы зоны обзора по углу места, град. | 0,5…30 | 0,2…30 |
| Вероятность правильного обнаружения | - | 0,9 |
| Вероятность ложной тревоги | - | 10-7 |
| СКП измерения дальности (большая из величин) | 3% r или 150 м | 1% r |
| СКП измерения азимута на максимальной дальности | 0,5 | |
| Разрешающая способность по дальности (большая из величин) | 1% r или 230 м | - |
| Разрешающая способность по азимуту на максимальной дальности, град. | 1,25 | |
| Время обзора, с | ||
| Время перехода на резерв, с |
В таблице 12 приведены основные характеристики отечественных обзорных РЛС. Сравнение данных таблиц 11 и 12 позволяет сделать вывод, что характеристики реальных обзорных РЛС по некоторым позициям отличаются от рекомендуемых. В частности, дальность действия эксплуатируемых в России ПРЛС значительно превышают стандарты, принятые в ИКАО. Причина этого состоит в том, что ГА вынуждена использовать образцы ПРЛС, разработанные для целей обороны и отличающимися повышенными возможностями по сравнению с ПРЛС гражданского назначения.
Таблица 12
| Характеристика | 1РЛ-139 | “Скала-М/МПР” | ДРЛС- 7см | ДРЛС-9 | “Иртыш” | “Экран-85” | “Скала-МПА” | “Онега” | |
| Максимальная дальность (по ВС с ЭПР 10 м2), км | 400/350 | ||||||||
| Вероятность обнаружения | 0,5 | 0,8 | 0,8 | 0,8 | 0,9 | 0,8 | 0,9 | 0,9 | |
| Минимальная дальность, км | 3,5 | 3,5 | 0,8 | 1,5 | 0,9 | ||||
| Максимальная высота обнаружения, км | |||||||||
| Пределы зоны обзора по углу места, град | 0,7…30 | 0,7…45 | 1…20 | 0,5…35 | 0,5…36 | 0,3…35 | 0,3…45 | 0,3…45 | |
| Разрешающая способность: | |||||||||
| по дальности, м | 1,…2% М | ||||||||
| по азимуту, град | 1,5 | 1,5/2 | 3,5 | 3,5 | 1,5 | 1,5 | |||
| Темп обновления информации, с | 10 и20 | ||||||||
| Длина волны, см | |||||||||
| Наработка на отказ, ч | |||||||||
| Средний ресурс, тыс.ч | - | - | |||||||
| СКП измерения: | |||||||||
| дальности, м | 1…1,5% М | ||||||||
| азимута, град | 0,8/1 | 1,5 | 1,5 | ||||||
Дата добавления: 2019-07-26; просмотров: 2263;