Общие характеристики (требования) ОРЛ-Т
- Д максимальная - 400-450км
- угол обзора - 360°
- Д минимальная не более - 40км.
- период обновления инф. - 10с.
- Диапазон волн - 10см.- 23см. (дм)
- Точность определения координат (СКО) - не более Д- 300м и Аз -0,25°
- Разрешающая способность - не более Д -1000м и Аз -не более 1,3°
3.9.3. Вторичные радиолокационные системы (ВРЛС)
 Вторичная радиолокационная система представляет собой совокупность ВРЛ, устанавливаемого на земле, и ответчиков, устанавливаемых на борту ВС
Вторичная радиолокационная система представляет собой совокупность ВРЛ, устанавливаемого на земле, и ответчиков, устанавливаемых на борту ВС
Рис. 63 . Структурная схема вторичной радиолокационной системы (ВРЛС)
(рис.63). ВРЛ вырабатывает кодированные запросные сигналы, представляющие несколько высокочастотных импульсов, отстоящих друг от друга на определенные временные интервалы (коды запроса). Через направленную в горизонтальной плоскости антенну запросные коды излучаются в пространство.
На борту ВС запросные сигналы принимаются ответчиком, и после усиления и преобразования в устройстве формирования ответа УФО образуется ответный кодированный сигнал (ответные коды), который излучается передатчиком ответчика через ненаправленную антенну в пространство. Ответный сигнал представляет набор импульсных сигналов, которые в закодированном виде содержат ответную дополнительную информацию. ВРЛ принимает ответные сигналы, которые после усиления и преобразования поступают на индикаторные устройства. Одной из особенностей системы вторичной радиолокационной системы является то, что несущие частоты, на которых передаются запросы и ответы, выбираются различными. В системах ВРЛ обнаружение ВС и измерение их координат (азимута и наклонной дальности) осуществляется, так же как и в ПРЛС. При распространении запросов от ВРЛ до ВС и ответов от ВС до ВРЛ происходит их запаздывание во времени на величину
tз = 2r/c + t0,
где t0 - дополнительная задержка, связанная с формированием ответного сигнала и его обработкой в ВРЛ.
Время запаздывания ответных сигналов зависит только от расстояния до ВС, поскольку задержка t0 - величина постоянная. Время tз измеряется непосредственно по индикатору, тем самым измеряется расстояние r между ВРЛ и ВС. Азимут ВС определяется по углу поворота антенны ВРЛ в момент поступления ответных сигналов. Дополнительная информация после специальной обработки отображается на обычных индикаторах в виде дополнительных отметок либо на специальных индикаторах (цифровые табло, знаковые ЭЛИ). Во вторичных радиолокационных системах (ВРЛС) УВД в качестве дополнительной информации передаются бортовой номер, высота полета, запас топлива, сигналы бедствия, потери радиосвязи и др.
Дальность действия ВРЛС.
Радиосвязь в ВРЛС осуществляется по двум независимым каналам: запроса и ответа. Дальности действия системы по этим каналам в общем случае могут отличаться друг от друга. Максимальные дальности действия для свободного пространства по каналам запроса и ответа определяются выражениями:
rсв max з =  ; rсв max o =
; rсв max o =  (4),
(4),
где Р Прд з - импульсная мощность передатчика ВРЛ; D з - КНД антенны ВРЛ при передаче; Dо - КНД антенны ответчика при приеме; η з - к.п.д. антенно-фидерного тракта ВРЛ при передаче; η о - к.п.д. антенно-фидерного тракта ответчика при приеме; λ з - длина волны запросного сигнала; Р Прм min o - чувствительность приемника ответчика; РПрд о - импульсная мощность передатчика ответчика;  - КНД антенны ВРЛ при приеме;
- КНД антенны ВРЛ при приеме;  - КНД антенны ответчика при передаче;
- КНД антенны ответчика при передаче;  - к.п.д. антенно-фидерного тракта ВРЛ при приеме;
- к.п.д. антенно-фидерного тракта ВРЛ при приеме;
 - к.п.д. антенно-фидерного тракта ответчика при передаче;
- к.п.д. антенно-фидерного тракта ответчика при передаче;  - длина волны ответного сигнала; Р Прм min з - чувствительность приемника ВРЛ.
- длина волны ответного сигнала; Р Прм min з - чувствительность приемника ВРЛ.
Дальность действия системы определяется меньшей из величин rmax з и rmin о. Выражения (4) показывают, что максимальная дальность действия прямо пропорциональна корню второй степени из отношения мощности Прд к чувствительности Прм. Для ПРЛС (см. выражение 1) она пропорциональна четвертой степени из этого же отношения. Это значит, что при одинаковых отношениях мощности Прд к чувствительности Прм во вторичных РЛС обеспечивается большая дальность действия либо обеспечивается такая же дальность при значительно меньшей мощности Прд. В ВРЛ применяются Прд с мощностью, на два или даже на три порядка меньшей, чем в Прд ПРЛС.
Кодирование сигналов
Кодирование сигналов в ВРЛС производится в каналах запроса и ответа для представления информации, передаваемой по этим каналам, и для повышения помехоустойчивости ВРЛС. Режим импульсного излучения вынуждает использовать в ВРЛС различные разновидности импульсных кодов. Так как разработка ВРЛС в России осуществлялась независимо от западных разработок, стандарты, стандарты на них в России и ИКАО оказались различными. Это различие, прежде всего, коснулось кодов. Российский код называется кодом УВД, международный — кодом RBS, причем в отечественных ответчиках предусмотрена возможность работы с кодами УВД и RBS.
При реализации режима УВД в канале запроса поочередно излучаются двухимпульсные кодовые посылки для запроса бортового номера (1-я посылка), высоты полета (2-я посылка), путевой скорости (3-я посылка) и координатной отметки (4-я посылка). Эти посылки отличаются временным интервалом между импульсами кодовой пары.
Ответные УВД состоят из трех частей (рис.64). Первая его часть представляет так называемую координатную двухипульсную посылку КК, с помощью

а) код бортового номера; б) код высоты
Рис. 64. Структура ответных кодов в режиме “УВД”
которой формируется отметка ВС на экране индикатора, вторая — ключевой трехимпульсный код, обозначающий содержание информации следующей в третьей, информационной части кода. Ключевой код имеет три разновидности. Это может быть код ключа номера КН, либо ключ высоты КВ, либо ключ скорости КС.
Третья информационная часть ответного кода представляет собой многоимпульсный позиционный двоично-десятичный код, для которого выделено 80 временных позиций, отстоящих друг от друга на 4 мкс. Каждые 8 временных позиции называются декадами и предназначены для представления нулей и единиц, с помощью которых формируются десятичные цифры и числа. Для отображения единиц и нулей используется по две позиции. Единице соответствует импульс на первой временной позиции, нулю — на второй . Если ответный код содержит информацию о бортовом номере , то первая декада отображает единицы номера, вторая - десятки, третья - сотни, четвертая - тысячи, пятая - десятки тысяч. Таким образом, информация о бортовом номере занимает 40 временных позиций. Остальные 40 служат для повторения информации о бортовом номере в интересах повышения его верности.
Ответный код высоты и запаса топлива имеет сходную структуру. Вначале следует координатный код КК и код ключа высоты КВ (рис.64,б). Далее идут 80 позиции, разделенные на 10 восьмиэлементных декад, каждая из которых обеспечивает кодирования десятичных цифр. Первая декада отображает десятков метров высоты, вторая — сотен, третья — тысяч, четвертая — десятков тысяч и вида информации о высоте (абсолютная или относительная), пятая представляет запас топлива. Последующие пять декад, как и прежде, служат для повторения этой информации.
Путевой угол кодируется с помощью первых 10 пар информационных импульсов, каждая из которых позволяет отобразить угол с дискретностью 1800/256 значениями, кратными этим минимальным долям. Путевая скорость передается с дискретностью 5,9 м/с десятью следующими парами. Численное значение путевого угла и скорости определяется суммой численных значений, закрепляемых за отдельными разрядами, в которых фигурируют единицы.
Международный код RBS имеет следующую структуру (рис.65,в).
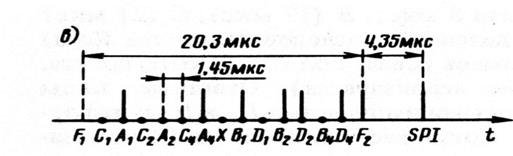
Рис. 65 . Структура ответного кода номера (7306) в режиме RBS
Запросные сигналы представляют собой 4 вида двухимпульсные кодов А, В, С и D. Коды А и В служат для запрос номера рейса, С — высоты, D — резервный. Ответные коды более сложные. Они содержат два опорных импульса F1 и F2 соответствующих координатному коду КК и серию информационных импульсов, располагаемых на 13 временных позициях между опорными импульсами. Номер рейса и высота полета передаются четырьмя группами импульсов А, В, С и D, каждая из которых отображает цифру восьмеричной системы счисления. Для отображения цифр от 0 до 7 в каждой группе имеется три позиции, обозначенных буквами А1, А21, А4 , В1 , В2, В4 и т.д. Позиция, занимаемая импульсом, имеет значение двоичной единицы, пустая — нуля. Таким образом, здесь реализована четырехзначная двоично-восьмеричная система счисления, позволяющая отобразить 4096 номеров ВС, высоты в пределах 103…105 футов с дискретностью 100 футов. При передаче информации о номере импульсы группы А кодируют информацию, соответствующую тысячам, В — сотням, С — десяткам и D — единицам десятичных чисел. Число 7700 служит для передачи сигнала бедствия, число 7600 — сообщения о потере радиосвязи, 7500 — о нападении на экипаж.
Дополнительный импульс SPI предназначен для индивидуального опознавания и передается по запросу по каналм радиосвязи с земли. Импульс выдается в течение 10…30с при нажатии кнопки “Знак” на пульте управления бортовым ответчиком.
При передаче информации о высоте порядок передачи групп импульсов информационного кода установлен следующим: D, А, В, С. В группе D используется две позиции D2 и D4 позиция D1 свободна и передаются три градации высоты ценой 32000 футов каждая. Позициями групп А и В передается по 7 градаций ценой соответственно 4000 и 500 футов каждая, а позициями группы С — 5 градаций по 100 футов. Последняя пятая градация передается цифрой 7 . Цифры 5 и6 не используются. Максимальная высота, которая кодируется таким методом, будет равна сумме произведений чисел градаций на их цену, т.е. 128000 футов. Так как отсчет высоты производится от остаточной высоты 1300 футов, то максимальная передаваемая высота будет 126700 футов.
Процесс заполнения позиций и градаций идет следующим образом. После заполнения пяти градаций С двоичная единица передается на позиции В. Позиция С при этом обнуляется. После заполнения пяти градаций В единица передается позиции А, а после ее заполнения позиции D. Заполнение может изменяться как в большую, так и в меньшую сторону.
Помехи, создаваемые боковыми лепестками ДНА антенны. Во вторичном радиолокаторе используются антенны направленного излучения, которые излучают и принимают основную часть энергии в пределах узкого сектора (главный лепесток ДНА), но они также излучают и принимают часть энергии сигналов и в других направлениях (боковые лепестки ДНА). По этим лепестка, так же как и по главному лепестку, происходит излучение запросных и прием ответных сигналов. При уменьшении расстояния между ВС (ответчиком) и ВРЛ ответчик будет срабатывать не только от сигналов главного лепестка, но и от сигналов боковых лепестков, что приводит к появлению на экранах индикаторов кроме основной отметки цели, так называемых ложных отметок. Угловое положение ложных отметок не соответствует угловому положению ВС в пространстве (рис.66).

Рис. 66. Ложные отметки от ВС на экране ВРЛ
1,2,3,4 - отметки на индикаторе при разных положениях ВС; 5 - основная отметка; 6 - ложные отметки
Ложные отметки снижают качество работы системы, затрудняют наблюдение за полезными отметками и снижают точность измерения азимута. Все это требует принятия специальных мер для устранения ложных отметок, которые называются подавлением сигналов боковых лепестков. Эти меры применяются как в канале запроса, так и в канале ответа. В первом случае устраняется срабатывание ответчика от сигналов запроса, излучаемых боковыми лепестками, во втором - прием сигналов ответа боковыми лепестками антенны запроса ВРЛ. Наиболее эффективным способом является сравнение сигналов направленной антенны ВРЛ с сигналами специальной ненаправленной в горизонтальной плоскости антенны подавления. Для реализации этого способа в ВРЛ используются два передатчика: Прд запроса (Прд з), связанный с направленной антенной запроса А з, и Прд подавления, (Прд п), связанный с антенной подавления А п (рис.67) .

Рис. 67. Подавление сигналов боковых лепестков по каналу запроса:
а - упрощенная структурная схема; б - амплитудные соотношения сигналов запроса и подавления; 1 - диаграммы излучения сигналов запроса Е з и подавления Е п; 2 - сигналы запроса, принятые от главного лепестка; 3 - сигналы запроса, принятые от боковых лепестков; 4 - импульсы запроса; 5 - импульс подавления
Антенна подавления излучает сигналы подавления на частоте запроса, а в ответчике импульсы подавления выделяются по известному временному интервалу между ними импульсами запроса. Мощность Прд п выбирается такой, чтобы амплитуда излучаемых сигналов подавления была меньше уровня сигналов запроса, излучаемых главным лепестком, но больше уровня сигналов запроса, излучаемых боковыми лепестками (рис.67,б). Когда ВС облучается главным лепестком, амплитуда сигналов запроса будет больше амплитуды сигнала подавления: Е з > Е п. Если же ВС облучается боковыми лепестками, то Е з< Е п. В ответчике на выходе приемника используется схема амплитудного сравнения САС. Она пропускает импульсы на схему формирования ответов УФО только в том случае, когда Е з > Е п. Таким образом, ответчик вырабатывает ответные сигналы только тогда, когда он запрашивается сигналами главного лепестка, а сигналы запроса, передаваемые боковыми лепестками, на ответчик не воздействуют.
При подавлении по каналу ответа в ВРЛ используются два приемника (или два канала приема одного Прм): Прм ответа, связанный с Аз , и Прм подавления, связанный с Ап. Выходы этих Прм объединяются схемой амплитудного сравнения. На ее выходе выделяются сигналы, принимаемые главным лепестком. А з.
Недостатки существующих систем ВРЛ и перспективы развития
Опыт эксплуатации систем ВРЛ выявил ряд существенных недостатков, которые ограничивают их использование в составе автоматизированных систем УВД. К ним относятся:
невысокие точностные характеристики определения координат ВС
значительная зона (до 100 км) влияния боковых лепестков, снижающая вероятность получения информации при увеличении интенсивности воздушного движения и числа ответчиков из-за наложения ответных кодов;
недостаточный объем информации, содержащийся в ответных сигналах; невысокая пропускная способность;
ограниченная пропускная способность по информационному обмену.
Радикально устранение существующих недостатков СВРЛ будет осуществлено при внедрении дискретно-адресной ВРЛС (ДАС).
Основной принцип работы ДАС заключается в использовании индивидуальной адресации запроса и ответа, для чего всем ВС (ответчикам) присваиваются номера-адресы, а в сигналы запросов и ответов включаются адреса ответчиков ВС. При этом значительно уменьшается вероятность наложения кодов, так как поток ответных сигналов уменьшится в 10…20 раз.
Следовательно, увеличивается пропускная способность ответного канала ВРЛС. Это позволит увеличить объем передаваемой по ним информации и использовать его для речевого обмена между диспетчерами и экипажами ВС. В принципе число запросов на одно ВС при адресной работе может быть уменьшено до одного.
В ДАС, кроме запросной и расширенной полетной информации, с борта ВС будут передаваться следующие сообщения: навигационная информация от БПНК ВС, информация о метеообстановке в районе полета, решение экипажа по использованию полетной информации, а с земли будут передаваться: указания диспетчера УВД, дублирующие их передачу по каналу голосовой связи (эшелон, курс, частота радиосвязи, минимальная безопасная высота полета), инструктивная информация о воздушной обстановке. Кроме того, по этим же каналам обеспечивается автоматическая работа системы предупреждения столкновений с ВС и с землей. Предусмотрено буквенно-цифровое отображение информации в кабине пилотов.
Для запроса каждого ВС запросчик должен хранить данные об адресах и ориентировочном местоположении ВС, находящихся в зоне действия ВРЛ. Для получения этих сведений ДАС вначале работает в режиме “Вызов всем” с запросом координат всех ВС и адресов ВС с ответчиками ДАС. Ответы запоминаются в наземной РЛС, после чего возможна работа в режиме индивидуального запроса, который заключается в ориентировании ДНА на определенные ВС по заданной оператором программе с целью их автосопровождения. Периодически режим “Вызов всем” должен повторяться с целью получения обновленной информации о несопровождаемых ВС и новой от ВС, вошедших в зону наблюдения. Возможность одновременной работы систем ДАС и существующих СВРЛ обеспечивается чередованием адресного и неадресного режимов. Длительность периода адресной работы выбирается
такой, чтобы обеспечить обработку 10 ответчиков в луче ДН. В таблице 13 приведены основные характеристики вторичных радиолокаторов
Таблица 13
| Характеристика | Корень-АС | Лист | ДАС |
| Максимальная дальность действия, км | - | 400/160 | |
| Пределы зоны обзора по углу места, град | 0,5…45 | 0,5…45 | 0,3 50 |
| Вероятность получения информации | ≥ 0,9 | 0,95 | 0,9…0,98 |
| Вероятность получения ложной информации | 10-3 | - | 10-6 |
| СКП измерения дальности, м | 200/50 | ||
| СКП измерения азимута, угл. мин | |||
| Время обновления информации , с | 4 и 20 | - | 5 и 10 |
| Наработка на отказ, ч | > 500 | ||
| Технический ресурс, ч | - | ||
Нормы ИКАО для ВРЛ
DOC 9684
A\N 951
2.1
ЭКСПЛУАТАЦИОННОЕ
НАЗНАЧЕНИЕ
ИКАО установила нормы и выработала ряд рекомендаций на тактические и некоторые технические характеристики вторичных радиолокаторов SSR (secondary suveillance radar).
Для радиолокационных систем с активным ответом устанавливается зона обнаружения, определяемая следующими параметрами: максимальная дальность действия 370 км, минимальная дальность действия 1,85 км, максимальный угол места 450, минимальный угол места 0,50, максимальная высота 30480 м. Зона должна быть обеспечена при любых метеорологических условиях и на всех азимутах.
Запросные сигналы должны посылаться на частотах (1030±0,2) МГц, ответные – на частоте (1090±3) МГц. Поляризация запросных и ответных сигналов должна быть вертикальной.
Сигнал запроса должен состоять из двух импульсов, обозначаемых Р1 и Р3 (рис. 1.3). Дополнительный импульс Р2, предназначенный для подавления сигналов, приходящих с направления боковых лепестков, передается через 2 мкс после Р1.

Рис. 1.3. Структура сигнала запроса при трехимпульсном подавлении
Интервал между импульсами Р1 и Р3 определяет код запроса. Могут использоваться четыре запросных кода: A, B, C и D с кодовыми интервалами 8, 17, 21 и 25 мкс соответственно.
Коды A и B предназначены для опознавания ВС. В ответ на запросы этими кодами бортовой ответчик должен сообщить на землю рейсовый номер ВС.
Запросный код Сиспользуется для получения данных о высоте, на которой находится ВС. При запросе этим кодом ответчик передает на землю показания барометрического высотомера, отрегулированного на стандартное давление 760 мм рт. ст. (1,013×105 Па).
Код D зарезервирован для использования в перспективных системах УВД.
Нормы ИКАО предполагают применение двухимпульсных и трехимпульсных систем подавления сигналов боковых лепестков по запросу. При двухимпульсной системе подавления, когда используется сравнение амплитуд импульсов Р1 и Р3, амплитуда Р1 в антенне приемника бортового ответчика должна превышать амплитуду Р3 по крайне мере на 11 дБ для всех азимутальных углов, кроме тех, которые охватываются основным лепестком антенны запросчика.
Для трехимпульсной системы подавления, когда используется сравнение амплитуд импульсов Р1 и Р2, амплитуда импульса Р2 в антенне приемника бортового ответчика должна быть равна или больше амплитуды импульса Р1 для всех направлений, кроме направления главного лепестка запросной антенны. Амплитуда этого же импульса Р2 должна иметь уровень на 9 дБ ниже амплитуды импульса Р1 в пределах сектора запроса.
Максимальная частота запросов не должна быть больше 450 Гц.
Для предотвращения ненужных срабатываний ответчиков, находящихся вне установленной зоны управления, эффективная излучающая пиковая мощность импульсов запроса Р1 и Р3 (произведение импульсной мощности на коэффициент усиления антенны) не должна превышать 52,5 дБ по отношению к 1 Вт (180 кВт).
Нормы ИКАО устанавливают требования на структуру ответных кодов, объем и характер передаваемой информации.
Информацию, получаемую с помощью вторичных РЛС, можно условно разделить на две основные части: координатную и дополнительную.
Ответный сигнал состоит из двух крайних опорных импульсов F1 и F2 - координатных, временной интервал между которыми составляет (20,3±0,1) мкс (рис. 1.4).

Рис. 1.4. Структура ответного кода
Между ними расположены 13 кодовых позиций, предназначенных для формирования информационных кодов. Все информационные позиции разбиты на группы A, B, C и D. Каждая из этих групп содержит по три позиции A1, A2, A4; B1, B2, B4 и т.д. При этом группа А передает тысячи, В – сотни, С – десятки, D – единицы номера рейса. Импульсы передаются только для символа “1” младшими разрядами вперед, при нулевом символе импульс отсутствует.
Максимальное число, которое может быть записано таким образом, будет 7777. Поскольку в каждой декаде для передачи десятичных чисел используется только три разряда, передача десятичных цифр 8 и 9 невозможна. Передача данных о высоте производится кодом Гиллхэма.
(код Гиллхэма представляющий собой совокупность рефлексного трехдекадного кода Грея и специального трехразрядного рефлексного кода с градациями по 100 футов. Основной особенностью кода Гиллхэма является то, что для соседних градаций высоты в футах коды различаются в одном разряде, что уменьшает вероятность ошибок при наложении цифровых значений высоты).
Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменятся несколько бит одновременно.Например число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно.
Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно.
Это в свою очередь привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация.
Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7 когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Чтобы избежать этого, применяется так называемый одношаговый код, например так называемый Грей-код.
Грей-код является так называемым одношаговым кодом, т.е. при переходе от одного числа к другому всегда меняется лишь какой-то один из всех бит информации.
Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается.
Преимуществом Грей-кода является также его способность зеркального отображения информации.
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 000 | 001 | 010 | 101 | 110 | 111 | ||
| 000 | 001 | 011 | 010 | 110 | 111 | 101 | 100 |
| 100 | 101 | 111 | 110 | 010 | 011 | 001 | 000 |
Поскольку информация выраженая в Грей-коде имеет чисто кодированный характер не несущей реальной числовой информации должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар) который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как програмным так и аппаратным способом.
Дата добавления: 2019-07-26; просмотров: 1826;