Международная система АТС RBS. Режим S подсистемы ВРЛ
Вводимый, начиная с 90-х годов, режим S улучшает возможности подсистемы ВРЛ :
• запросный сигнал усложняется и адресуется не только всем, но и конкретному ВС;
• плотность потока внутрисистемных помех уменьшается, а пропускная способность повышается за счет адресации запросов;
• качество индивидуального опознавания повышается; Предусмотрено 16 777 215 кодов для ВС, что много больше 4096 кодов режима А;
• высота передается с дискретностью 25 футов или 100 футов как в режиме С или в метрах;
• улучшаются точностные характеристики благодаря моноимпульсному измерению координат;
• режим S автоматически передает расширенный объем информации, облегчая работу диспетчеров и экипажей ВС;
• ответчики режима S входят в системы оповещения об опасных ситуациях и предупреждения столкновений воздушных судов ACAS, а также автоматического зависимого наблюдения ADS-B.
Сигнал запроса.
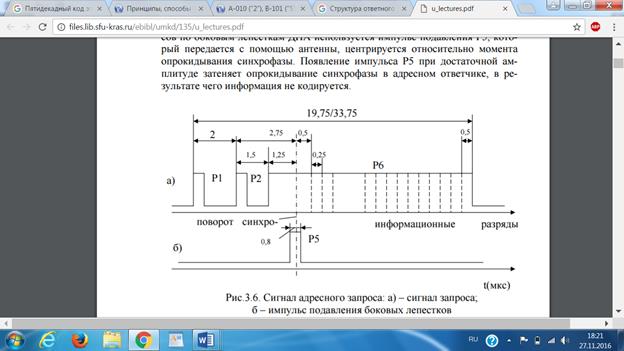
Состоит из коротких импульсов Р, и Р2, импульса Р5ПБЛ(подавление боковых лепестков)и информационного импульса Р6большой длительности
Для передачи информации используется относительная фазовая манипуляция.
Импульс Р6содержит две посылки для подстройки по фазе гетеродина ответчика и 56 или 112 информационных посылок для передачи разрядов бинарного кода.
Запросы в режиме S могут содержать:
• индивидуальный адрес воздушного судна;
• адрес общего вызова.
Индивидуальный адрес служит для установления связи с конкретным ВС. Запросчик передает признаки запрашиваемой информации, сообщает свой адрес и передает при необходимости дополнительные сообщения.
Общий вызов адресуется всем ВС и используется для оповещения и запроса их адресов.
Предусмотрен запрос A/C/S, позволяющий запрашивать ответчики, работающие в режимах А и С.
Сигнал ответа.
Состоит из «преамбулы» и блока данных информационного кода.
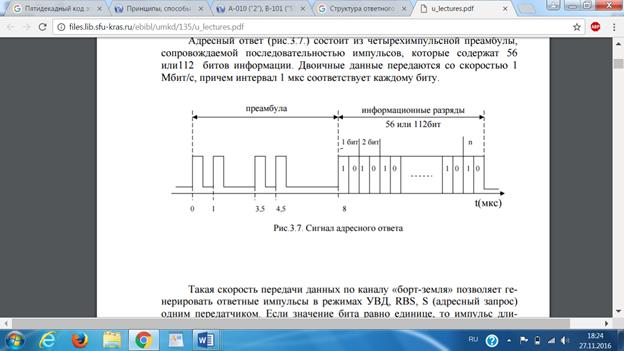
Преамбула
«Преамбула» обеспечивает обнаружение и определение координат ВС при использовании 56- или 112-разрядных бинарных кодов с активным нулем.
Длительность импульса 0,5мкс (в Преамбуле). Импульсы «нуля» и следующей за ним «единицы» сливаются.
Каждая передача обязательно содержит:
• код формата передачи;
• код адреса воздушного судна или запросчика, объединенный с кодом проверки четности.
Ответные сигналы могут включать:
• адрес запросчика, которому предназначен ответ;
• код опознавания в режиме А, адрес ВС;
• полетный статус;
• код высоты в футах или метрах;
• сообщения по различным линиям и различного формата.
В интересах предупреждения столкновений и информационной системы ADS-B излучаются также беззапросные сигналы, содержащие адрес, координаты, скорость судна и т.п.
Уровни требований к ответчикам режима S:
1. Обеспечение адресных приемопередач по линиям «земля-воздух-земля», «воздух-воздух» и передачи беззапросных сигналов.
2. Обеспечение требований уровня 1 - обмена сообщениями по линиям «земля-воздух» и «воздух-земля».
3. Обеспечение требований уровня 2 - приема удлиненных сообщений по линии «земля-воздух».
4. Обеспечение требований уровня 3 - передачи удлиненных сообщений по линии «воздух-земля» при взаимодействии с одним запросчиком.
5. Обеспечение требований уровня 4 - взаимодействия с группой запросчиков.
Система вторичной радиолокации для УВД, используемая в РФ и странах СНГ (отечественный диапазон)
Предусматривает применение различных несущих частот и кодов в зависимости от назначения радиолокатора и режима работы ответчика.
· (Двоично-десятичная система применяется в ответных кодах режима УВД (отечественный режим) Двоично-восьмеричный код имеет базис цифр 0, ...,7 и применяется для ответных кодов высоты в режиме RBS (международный режим).)
Режимы этой системы в различных запросчиках и ответчиках, работающих как в ней, так и в системе RBS, называют режимами УВД.
Запросные коды - двух-импульсные коды, как и в системе RBS.
Длительность импульсов запросных и ответных сигналов во всех режимах 0,8 мкс. Получение информации о бортовом номере. Параметр кода запроса Ткз=9,4мкс.
Запросный код 1 (ЗК1) предназначен для запроса бортового номера самолёта (БН) – временной интервал 9,4 мкс.
Запросный код 2 (ЗК2) предназначен для запроса текущей информации –ТИ(абсолютной и относительной высоты ВС, запаса топлива на борту) – временной интервал 14 мкс.
Запросный код 3 (ЗК3) предназначен для запроса вектора путевой скорости самолёта – временной интервал 23 мкс.
Запросный код 4 (ЗК4) предназначен для запроса только координат самолёта – временной интервал 19 мкс.
Ответный сигнал зависит от типа запрашивающего локатора.
При запросе обзорным или диспетчерским локатором включает:
• координатный код, излучаемый в ответ на каждый запрос;
• информационный код, «прореженный» в 4-10 раз в зависимости от типа ответчика.
Информационный код состоит из трехимпульсного кода «ключа», подтверждающего передачу информации о номере, и 20-разрядного бинарного кода бортового номера с активным нулем, повторяемого дважды. Повторение обеспечивает исправлениеоднократных и обнаружение двукратныхошибок в разрядах.
Пятидекадный двоично-десятичный код номера позволяет назначить индивидуальный код любому из 99999 судов. Первые две цифры бортового номера означают тип судна, три последние - номер этого типа. Интервал между соседними позициями информационного кода 4 мкс.
20-разрядный информационный код содержит:
• 12-разрядный двоично-десятичный код барометрической высоты;
• признак высоты;
• признак состояния бортовых систем;
• 4 разряда сообщения о запасе топлива.
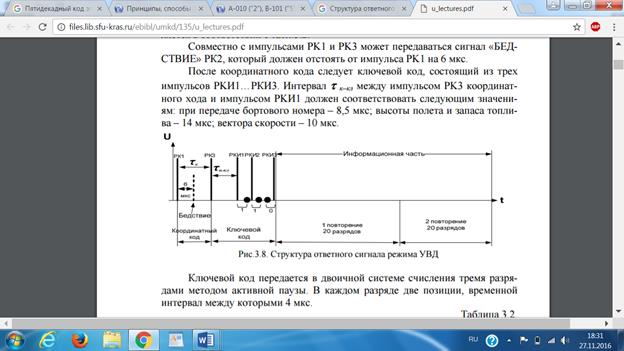
Стpуктуpа ответных сигналов в режиме УВД
Ответный сигнал включает в себя два импульса кооpдинатного кода, тpи импульса ключевого кода и соpок инфоpмационных импульсов.
3.9. 4. Автоматизированные системы УВД (АС УВД)
Важнейшую роль в обеспечении высокой регулярности и безопасности полетов играет четкость и надежность управления движения ВС. Однако традиционные способы УВД становятся недостаточно эффективными при большой интенсивности воздушного движения из-за ограниченных возможностей человека по управлению движением большого числа ВС.
Характер работы диспетчера принципиально не меняется, но ее напряженность резко возрастает, он уже не в состоянии справиться с огромным объемом информации, которая поступает к нему от большого числа ВС по различным каналам и в разной форме. Увеличение числа диспетчеров не решает задачи, так как при этом возникает новая проблема по координации их действий. Для упрощения и облегчения работы диспетчера его нужно освободить от функций сбора, хранения и обработки информации, оставив за ним лишь функцию принятия наиболее важных решений по УВД. В таком виде эта задача решается путем автоматизации процессов УВД на основе применения современных радиоэлектронных средств и вычислительной техники.
Структура АС УВД
АС УВД выполняет разнообразные функции по переработке большого объема информации и состоит из ряда отдельных комплексов и подсистем (рис.68):
- подсистема сбора информации ПСИ;
- подсистема связи и передачи информации ПСПИ;
- вычислительный комплекс ВК;
- подсистема отображения информации;
- подсистема связи с ВС ПСВС.

Рис. 68. Структурная схема АС УВД
Важным звеном АС УВД является диспетчер, замыкающий контур управления. В зависимости от вида системы и степени автоматизации каждая из подсистем может иметь различную структуру и функции, но для всех АС УВД эти подсистемы имеют общие задачи и отличительные признаки.
ПСИ включает датчики информации различных типов, позволяющие измерять координаты ВС, получать метеоинформацию, сообщения из соседних центров УВД. Информация, используемая в процессе УВД, подразделяется на статическую и динамическую. Статическая информация не меняется работы системы и включает параметры ВС и трасс. Она вводиться в ВК на этапе подготовки системы к эксплуатации, но при необходимости может корректироваться и в процессе эксплуатации. К динамической, т.е. изменяющейся, информации относятся координаты ВС, высота полета, бортовой номер или номер рейса, остаток топлива, сообщения об аварийной ситуации или отказе радиосредств, метеорологические данные. Все эти данные должны вводиться в систему автоматически в течение всего времени работы, т.е. по существу непрерывно.
Промежуточное положение между статической и динамической информацией занимают планы полетов, так как они могут корректироваться в процессе полета. План полета должен содержать номер ВС, номер трассы, время вылета, пролета контрольных пунктов и прибытия в пункт назначения, запас топлива и сведения о наличии на борту ответчика. Оперативно должны вводиться в систему планы внерейсовых полетов, передаваемых из других центров УВД. Планы полетов для рейсов, выполняемых по расписанию, вводятся заранее и корректируются относительно редко. Сигналы от отдельных датчиков ПСИ имеют различную природу. Некоторые сигналы представлены в аналоговой, другие - в дискретной форме. При этом способы кодирования дискретных сигналов могут быть разными. Для преобразования всех, поступающих от ПСИ сигналов, к единому виду, пригодному для ввода в ВК служит подсистема связи и передачи информации ПСПИ. На выходе этой подсистемы вся информация представляется в цифровых кодах, с которыми оперирует ЦВМ ВК. Дополнительно ПСПИ обеспечивает связь персонала центра управления со всеми взаимодействующими службами.
ВК обрабатывает все данные, поступающие от различных датчиков и формируют массивы информации для ПОИ. При высокой степени автоматизации в ВК решаются и задачи анализа воздушной обстановки. Обработка сигналов датчиков происходит в два этапа. Первоначальная обработка информации, называемая первичной, производится в ПСИ и ПСПИ. Основная цель этой обработки - очистка сигналов от помех и получение данных в форме машинных кодов. Второй этап осуществляется в ВК и называется вторичной обработкой, основная цель которой - получение возможно более полных данных о траекториях движения всех ВС, находящихся в зоне управления.
ПОИ предназначена для отображения воздушной обстановки в наиболее удобной для восприятия форме. В АС УВД координатная информация отображается в графической, т.е. аналоговой, форме, а дополнительная - в цифровой (рис. 69).

Рис. 69. Совмещенный план-индикатор
1 - формуляры сопровождения; 2 - формуляр ожидания прилетающего ВС; 3 - формуляр ожидания вылетающего ВС; 4 - табличный формуляр; 5 - таблица системных данных
С помощью ПОИ решаются также задачи активного взаимодействия диспетчера с ВК. ПСВС обеспечивает передачу команд управления на ВС, обмен сообщениями между экипажами ВС и службой УВД, а также получение и ввод в ВК некоторых данных с борта ВС.
Классификация АС УВД
АС УВД классифицируются по ряду признаков. Основными из них являются область применения, назначение, степень автоматизации (номенклатура автоматизированных функций) и способ получения информации о параметрах движения ВС.
В зависимости от сферы применения АС УВД различают:
- трассовые (районные);
- аэродромные;
- аэроузловые.
По назначению АС УВД разделяются на:
- АС планирования воздушного движения (АС ПВД);
- АС непосредственного управления воздушным движением (АС УВД);
- совмещенные (АС ПВД и УВД);
- АС управления наземным движением.
По степени автоматизации АС УВД разделяются::
- системы малой (частичной) автоматизации (МАСУВД);
- системы 1-го уровня автоматизации;
- системы 2-го уровня автоматизации;
- системы 3-го уровня автоматизации.
По способу получения координатной информации АС УВД делят:
- системы радиолокационного контроля;
- системы процедурного контроля .
Эксплуатационно-технические характеристики (ЭТХ) АС УВД
Эксплуатационно-техническими характеристиками принято называть показатели, отображающие сведения о сфере применения, функциях, Эксплуатационно-технических возможностях и качестве функционирования АС УВД. ЭТХ основных типов АС УВД, эксплуатируемых в Росси, приведены в таблице 14.
Таблица 14
| Показатели | Типы АС УВД | ||||||||
| Аэродромные | Аэроузловые | Районные | |||||||
| “Старт” | “Теркас” Мин. Воды | “Теркас” Киев | “Спектр” | “Теркас” Москва | “Теркас” Москва | “Трасса” | “Стрела” | ||
| Размеры зоны управления, тыс. км2 | |||||||||
| Число секторов управления | |||||||||
| подхода | - | - | - | ||||||
| круга | - | - | - | ||||||
| посадки | - | - | - | - | - | - | |||
| старта | - | - | - | - | - | - | - | ||
| руления | - | - | - | - | - | - | - | ||
| Число р/локационных позиций | |||||||||
| Число ВС, сопровождаемых системой ПРЛС | |||||||||
| Число ВС, сопровождаемых системой ВРЛ | - | - | - | - | - | ||||
| Число обрабатываемых планов полетов: | |||||||||
| стандартных | - | - | |||||||
| суточных | - | - | |||||||
| текущих | - | - | |||||||
Дата добавления: 2019-07-26; просмотров: 27859;