Список используемых обозначений и сокращений
КШМ – кривошипно-шатунный механизм;
КВ – коленчатый вал;
МОД – малооборотный двигатель;
СОД – среднеоборотный двигатель;
ВОД – высокооборотный двигатель;
ЦПГ – цилиндропоршневая группа;
ВМТ – верхняя мертвая точка;
НМТ – нижняя мертвая точка;
ЦМ – центр масс;
ПДМ – поступательно движущиеся массы;
ВМ – вращающиеся массы;
ПКВ – поворот КВ;
ДЭУ – дизельная энергетическая установка;
ПК – пропульсивный комплекс;
н. у. – нормальные условия;
ГВ – гребной винт;
ТК – турбокомпрессор


Для кинематической связи поршней с КВ используют три типа КШМ:
1. Центральный (рисунок 1). Ось цилиндра пересекается с осью КВ.
2. Деаксиальный (ось цилиндров не пересекает ось КВ, а смещена относительно неё на величину а, называемую десаксажем). Величина десаксажа
а≤0,1r
Применяется в малоразмерных ВОД. Уменьшается сила, прижимающая поршень ко втулке на такте расширения. При этом уменьшается работа трения и износ ЦПГ.
3. С прицепным шатуном (одним или несколькими). К каждой шатунной шейке крепится один шатун, называемый главным, а остальные, называемые прицепными, крепятся шарнирно к нижней головке главного шатуна.
Существуют V-образные и звездообразные двигатели такого типа.
В СДВС наиболее распространен центральный тип, для которого будем рассматривать все вопросы динамики.
Основными конструктивными параметрами КШМ являются радиус кривошипа r, длина шатуна Lш и их отношение
 ,
,
называемое постоянной механизма. При анализе КШМ угол поворота кривошипа φ, отсчитываемый в направлении его вращения от положения ВМТ
 ,
,
рад, принимается независимой переменной, определяющей положение механизма.
Угловая скорость кривошипа ω при кинематических и динамических расчетах принимается постоянной и равна, с-1:
 ,
,
где τ - время перемещения кривошипа на угол φ, с.
Угловое перемещение кривошипа φ°:
Угол отклонения шатуна от оси цилиндра β°:

Перемещение поршня Sφ отсчитывается от положения в ВМТ и является функцией угла поворота кривошипа  . Из рисунка 1. а следует, что
. Из рисунка 1. а следует, что

Эта формула является точной, но неудобной для практического использования, так как она содержит две связанные переменные φ и β, поэтому в расчетах часто используют приближенную формулу, м:

Скорость поршня при постоянной угловой скорости вращения КВ непостоянна. Среднее значение скорости поршня, м/с:
Cm=Sn/30,
где n – частота вращения КВ, об/мин.
Мгновенное значение скорости по времени, м/с:
v=dSφ/dτ=dSφ/dφ*ω=rω(sinφ+λш/2*sin2φ).
Ускорение, м/с2:
j=dv/dτ=dv/dφ*ω=rω2(cosφ+λш*cos2φ).
Силы, действующие на КШМ
На КШМ действуют силы:
- давления газов;
- инерции движущихся масс;
- тяжести;
- трения;
- полезного сопротивления на КВ.
Силы трения по сравнению с другими силами невелики. Поэтому в динамических расчетах ими пренебрегают, но учитывают их механическим КПД двигателя. Силы тяжести целесообразно учитывать в тех случаях, когда их относительная величина
pT>0,015рz.
Такие силы тяжести возникают в малооборотных дизелях.
Силы и моменты, действующие на КШМ, необходимо знать для расчета деталей на прочность, оценки работоспособности подшипников, определения неравномерности вращения коленчатого вала, проверки уравновешенности двигателя и для решения других задач. Определять силы и моменты удобно в относительных величинах, т. е. отнесенных к единице площади поршня Fn.
Определение приведенных масс
В динамических расчетах КШМ действительные массы движущихся частей для упрощения расчетов заменяются приведенными массами, сосредоточенными в тех точках КШМ, законы движения которых известны. При этом массы, сосредоточенные в одной и той же точке, суммируются. Динамическое действие приведенных масс должно быть эквивалентно действию реальных. На рисунке 2 показаны динамические модели КШМ и его отдельных частей, состоящих из жестких невесомых звеньев, с кинематическими параметрами, как и у реальных КШМ, и приведенных масс.
Приведенные массы шатуна
Шатун совершает сложное движение в вертикальной плоскости (рисунок 2, а), при этом точка В совершает поступательное движение, а точка А — вращательное. Поэтому массу шатуна Мш делят на две приведенные массы Мшs и Мшr, сосредоточенные в этих точках. Масса Мшs сосредоточена в центре верхней головки шатуна и совершает поступательное движение, а масса Мшr находится в центре шатунной шейки и совершает вращательное движение. При замене массы шатуна двумя приведенными массами должны быть соблюдены условия статической эквивалентности
Мш=Мшs+Mшr, Mшsa=Mшrb,
где a и b - расстояние от центра массы шатуна до центров приведенных масс. Из этих равенств следует, что:
Мшs=Мш*b/(a+b)=Mш*b/Lш; Мшr=Мш*a/(a+b)=Mш*a/Lш.
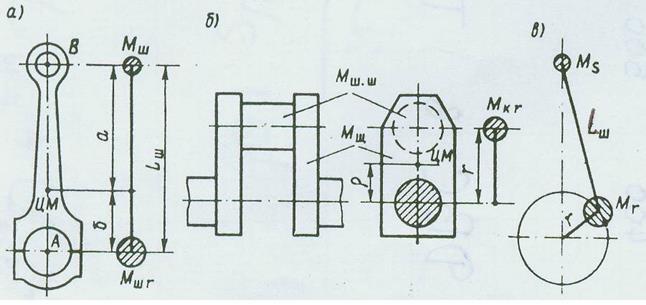
Приведенные массы кривошипа. Масса рамовых шеек полностью уравновешена, так как вращается вокруг собственной оси. Неуравновешенная масса кривошипа состоит из массы двух щек 2Мщ и массы шатунной шейки Мш.ш (рисунок 2, б). Эти неуравновешенные вращающиеся массы заменяются одной, приведенной к радиусу кривошипа, Мкr. Масса шатунной шейки находится на расстоянии r от центра вращения и не требует приведения. Массу щеки Мщ с центром массы, находящимся на расстоянии ρ от оси вращения, заменяют приведенной к радиусу кривошипа Мщr исходя из условия равенства центробежных сил действительной и приведенной масс, т.е. Мщρω2=Мщrrω2.

Отсюда приведенная масса одной щеки Мщ=2Мщρ/r. Общая приведенная масса неуравновешенных вращающихся частей кривошипа
Мкr = Мш.ш + 2Мщr = Мш.ш + 2Mщρ/r
Масса поршня Мn совершает только поступательное движение и считается сосредоточенной в центре поршневого пальца, а в крейцкопфных двигателях — в центре поперечины. В массу поршня включают массу всех деталей, соединенных с ним и совершающих поступательное движение.
Общая масса поступательно движущихся частей, кг:
Мs=Мn+Мшs=Ма + Мшb/Lш.
Общая масса неуравновешенных вращающихся частей, кг:
Мr=Мкr+Мшr=Мш.ш+2Мщρ/r+Мша/Lш.
Для удобства расчетов абсолютные значения массы заменяют относительными (кг/м2), т. е.
ms=Ms/Fn, mr=Mr/Fn.
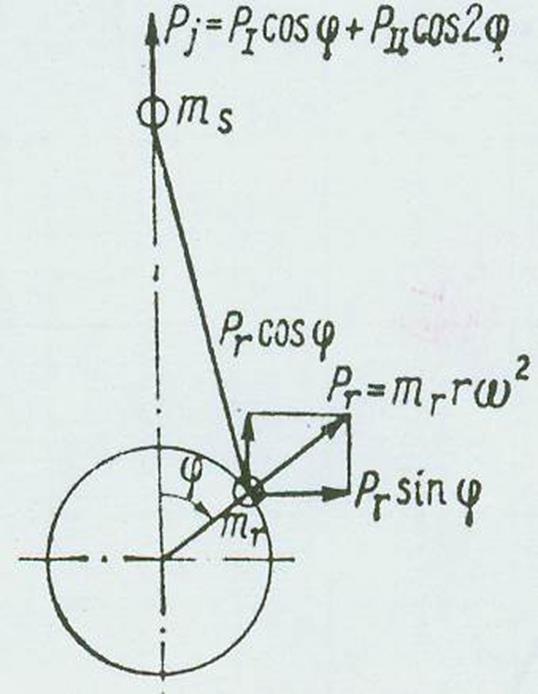
Силы инерции. При работе двигателя от поступательно движущихся масс (ПДМ) и неуравновешенных вращающихся масс (ВМ) на КШМ действуют силы инерции (рисунок 3).
Сила инерции ПДМ приложена в центре поршневого пальца, действует вдоль оси цилиндра и равна, МПа:
Pj=-msj=-msrω2(cosφ+λш+cos2φ)=PIcosφ+PIIcos2φ. (5)
Сила Рj состоит из сил инерции первого порядка PIcosφ и второго порядка PIIcos2φ, где
PI=-msrω2 и PII=-msrω2λш — амплитуды соответствующих сил инерции. Силы инерции первого порядка в 3,5…5 раз больше сил инерции второго порядка. За один оборот коленчатого вала силы инерции первого порядка меняют направление один раз, а силы второго порядка — дважды. В районе ВМТ силы инерции препятствуют движению поршня, а в районе НМТ — способствуют ему. Значения сил инерции в ВМТ получим из формулы (5) при φ = 0°, а в НМТ при ф = 180°:
PjBMT=-msrω(1+ λш); PjHMT=msrω(1- λш).
Сила инерции ВМ постоянна по значению, приложена в центре шатунной шейки, направлена по кривошипу от центра вращения и равна, МПа:
Рr = mrrω2.
Разложив силу Рr, получим ее вертикальную Рrсоsφ и горизонтальную Рrsinφ составляющие, которые, действуя в соответствующих плоскостях, изменяют свое направление один раз за оборот, т. е. они первого порядка.
Суммарные силы инерции, действующие на двигатель в вертикальной плоскости:
PвиΣ=Pj+Prcosφ=PIcosφ+PIIcos2φ+ Prcosφ;
в горизонтальной плоскости:
PгиΣ = Ргsinφ.
Силы давления газов
На поршень со стороны камеры сгорания действует сила от давления газов в цилиндре двигателя Рr (рисунок 4). Она приложена в центре поршневого пальца и действует вдоль оси цилиндра.
Силы давления газов, действуя на поршень - Pr и на крышку цилиндра – (-Pr), взаимоуравновешиваются внутри двигателя и на его опоры не передаются. Вне двигателя силы давления газов проявляются в виде вращающего Мвр и опрокидывающего Мопр моментов. Относительное значение силы давления газов в зависимости от угла поворота кривошипа Рr=f(φ) определяется аналитически или графически по расчетной или действительной индикаторной диаграмме.
При определении по индикаторной диаграмме в координатах р — V (рисунок 5) на участке перемещения поршня от ВМТ до НМТ, в любом месте по высоте, проводим полуокружность радиусом r. Из центра О в сторону НМТ откладываем поправку Брикса
OO1 = rλш/2=r2/(2Lш),
а из точки О1, как из центра, проводим лучи через принятое число градусов (на рисунке 5 через 15° ПКВ) до пересечения с окружностью радиуса r. Проектируя полученные точки пересечения на ось V, получим давления, соответствующие этим углам поворота кривошипа. Отрезок по вертикали от оси V до индикаторной диаграммы будет соответствовать абсолютному давлению газов в цилиндре рг, а отрезок между линией и индикаторной диаграммой — избыточному давлению рг-p0.
|
|

Абсолютное значение силы давления газов на поршень
pг=РгFn, МН,
а относительное значение Рг, МПа.
Движущая сила
Движущая сила является результирующей всех сил, действующих на поршень – силы давления газов в цилиндре Рг, силы давления воздуха в подпоршневой полости Рп.п, силы инерции ПДМ Pj, силы тяжести ПДМ РТ и равна их алгебраической сумме, МПа:
Рдв=Рг-Рп.п+Pj+РТ,
где Рп.п — сила атмосферного давления, если подпоршневая полость сообщается с картером, или давление продувочного воздуха, если подпоршневая полость соединена с ресивером продувочного воздуха; Рт=msg, где m — относительная величина поступательно движущихся масс, кг/м2; g — ускорение свободного падения, м/с2.
Движущую силу можно определить и графически. Для этого строят диаграмму сил давления газов Рг = f(φ) и диаграмму сил инерции с обратным знаком — (-Рj)=f(φ) и определяют ординаты между ними (рисунок 6). Силы тяжести ПДМ и противодавление воздуха в подпоршневой полости — постоянные величины и учитываются при построении.
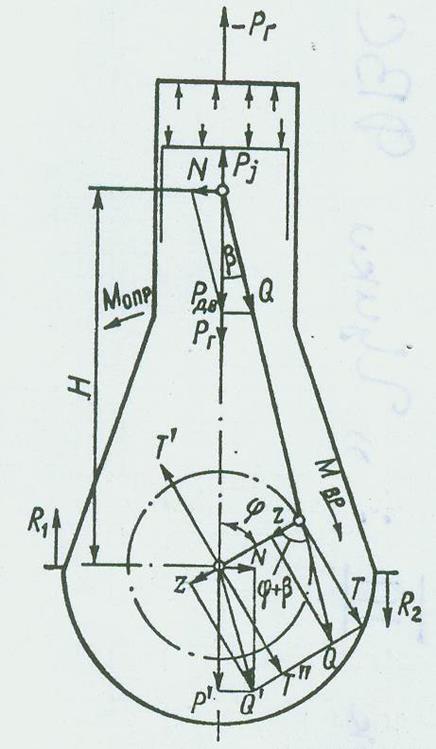
На рисунке 4 показано действие движущей силы в КШМ. Она приложена в центре поршневого пальца и действует вдоль оси цилиндра. Сила Рдв раскладывается на составляющие: нормальную силу, действующую перпендикулярно к оси цилиндра и прижимающую поршень ко втулке N=Pдвtgβ, и силу, действующую по оси шатуна
Q=Pдв/cosβ.
Силу Q переносим по линии ее действия в центр шатунной шейки и раскладываем на две составляющие: радиальную силу, действующую по кривошипу
Z=Qcos(φ+β)=Pдвcos(φ+β)/cosβ
и касательную (тангенциальную) силу
Т= Qsin(φ+β)=Pдвsin (φ+β)/cosβ.
Силы, действующие на КШМ, переменны по величине и направлению, поэтому для удобства анализа их представляют в виде графических зависимостей (см. рисунок 6), показывающих изменение сил по углу поворота кривошипа. Кривые периодические, с периодом 360° в двухтактных двигателях и 720° в четырехтактных. Силы считаются положительными, когда Рдв, Рj и Z направлены к центру вращения коленчатого вала, Т — направлена в сторону вращения коленчатого вала, а N — в сторону, противоположную вращению. Угол β положителен, когда шатун отклонен в сторону вращения коленчатого вала.
Из точки О (см. рисунок 4) проведем два равных, но противоположно направленных вектора Т’ и Т", параллельные и численно равные Т, и перенесем сюда же силу Z. Тогда пара сил T и Т’ образует момент, вращающий кривошип:
Mвр=Тr = Рдвr*sin(φ+β)/соsβ,
а сумма оставшихся сил Т' и Z будет равна равнодействующей силе Q', которая нагружает подшипники.

Рисунок 6 - Диаграммы сил, действующих в КШМ одного цилиндра четырехтактного двигателя
Рг — сила давления газов в цилиндре; Рj — сила инерции ПДМ: Р —движущая сила; Z — радиальная сила; N — нормальная сила; T — касательная сила
Сила Q' равна силе Q, действующей по шатуну, так как обе являются равнодействующими равных и одинаково направленных сил Z и Т, т. е.:
Q’=Q=Pдв/cosβ.
Вертикальная Р' и горизонтальная N' проекции силы Q' будут соответственно равны:
Р’=Q'соsβ=Рдвсоsβ/соsβ=Рдв;
N’=Q’sinβ=Pдвsinβ/cosβ=Pдвtgβ.
Следовательно, сила Р', действующая на остов двигателя в рамовом подшипнике в вертикальной плоскости, равна движущей силе Рдв, а сила N', действующая на подшипник в горизонтальной плоскости, равна нормальной силе N. Горизонтальные силы N и N' образуют пару сил с плечом H и создают переменный по величине и направлению момент, называемый опрокидывающим. Опрокидывающий момент Мопр=NН действует в вертикальной поперечной плоскости в направлении, противоположном действию вращающего момента, и уравновешивается внешним моментом реакций R1 и R2 на опорах.
Таким образом, результатом действия движущей силы являются: вращающий момент Мвр, приводящий в движение коленчатый вал; опрокидывающий момент Мопр, стремящийся опрокинуть двигатель в сторону, противоположную действию Мвр, и сила инерции Рj, стремящаяся приподнять или прижать двигатель по отношению к судовому фундаменту. Все силы и моменты переменны по величине и направлению.
P’=Pдв;
Pдв-Pг=Pj – сила, действующая на фундамент двигателя.
Поправка Брикса
Важнейшим конструктивным параметром дизелей является постоянная КШМ:
λ=r/Lш=1/5…1/3,5
где r – радиус кривошипа;
L – длина шатуна.
Перемещение поршня зависит от угла поворота КВ.
Из-за конечной длины шатуна L равным углам φ поворота КВ соответствуют неравные участки пути, проходимые поршнем (рисунок 7).
S(φ)=DB=OD-(OK+KB)
S(φ, β)=r+L-cosφ-Lcosβ (1)
При бесконечной длине шатуна β=0, и тогда:
S(φ)=r+L-r*cosφ-L=r-r*cosφ (2)
Из формул (1) и (2) можно получить значение поправки:
ОО’=S(φ, β)-S(φ)=r+L-r*cosφ-Lcosβ-r+r*cosφ=L-Lcosβ.
Максимальное значение поправки Брикса будет при 90° и 270° ПКВ:
S’=r2/2L=OO’.
Чтобы определить истинное мгновенное положение поршня, из центра О в сторону, противоположную цилиндру, откладывают эксцентриситет r2/2L. Из нового центра О’ проводят вектор O’A’ параллельно радиусу кривошипа. Проецируют точку A’ на вертикальную ось. Полученная точка будет соответствовать положению пальца поршня или центр подшипника поперечины крейцкопфа на ходе S.
Графический способ Брикса позволяет построить диаграмму перемещения поршня по углу φ.
Ускорение поршня достигает максимальных значений в ВМТ и НМТ, когда его скорость = 0. И наоборот, скорость поршня максимальна в тот момент, когда его ускорение = 0.
Лекция № 13.неравномерность вращения коленчатого вала. влияние числа оборотов, нагрузки и выключения цилиндров на равномерность вращения. определение результирующих сил инерции и их моментов. уравновешивание двигателей – 2 ЧАС.
Дата добавления: 2019-04-03; просмотров: 691;