СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ ТЯГОВОГО ОРГАНА И МОЩНОСТЬ ДВИГАТЕЛЯ
Мощность двигателя машины расходуется на преодоление сопротивления движению элементов конвейера и перемещению груза. Часть сопротивления преодолевается по всей длине конвейера и часть — в отдельных его пунктах: на барабанах (звездочках), в местах расположения погрузочных, разгрузочных, очистных и других устройств.
При расчетах сопротивления пользуются коэффициентом сопротивления перемещению груза, который показывает долю общего сопротивления движению, приходящуюся на единицу веса груза.
Коэффициент сопротивления перемещению груза (коэффициент сопротивления)
w =  , ,
| (5.16) |
где F — сопротивление при перемещении груза, Н; т — масса перемещаемого груза, кг.
Сопротивление (Н) на прямолинейном загруженном участке рабочей ветви конвейера
Fг= wg[(q + qт)  Lг] ± (q + qт)gH, Lг] ± (q + qт)gH,
| (5.17) |
где q — погонная масса груза, кг/м [см. (5.3); (5.10); (5.11)]; qт — погонная масса тягового органа (ходовой части) конвейера (масса 1 м длины тягового органа), кг/м; для ленточного конвейера qт = qл, учитываемая только для ленточного конвейера.
 = тр/lp, = тр/lp,
| (5.18) |
где qл — погонная масса ленты [см. (4.11), (4.14)], кг/м; — погонная масса вращающихся частей роликоопор рабочей ветви конвейера, кг/м; тр — масса вращающихся частей роликоопор рабочей ветви конвейера (ориентировочно равна 0,6 массы всей роликоопоры), кг; lp — шаг роликоопор рабочей ветви конвейера (см. табл. 6.14), м; w — коэффициент сопротивления перемещению груза (см. табл. 6.19, 8.12, 11.2);  — длина горизонтальной проекции загруженного участка конвейера, м:
— длина горизонтальной проекции загруженного участка конвейера, м:
 = Lг cos b, = Lг cos b,
| (5.19) |
Lг — длина загруженного участка конвейера, м; b — угол наклона участка; Н — высота подъема груза, м:
| H = Lг sin b, | (5.20) |
Сопротивление (Н) на прямолинейном порожнем участке рабочей ветви конвейера
Fп = wg(  Lп + qт Lп + qт  ) ± qтgHп, ) ± qтgHп,
| (5.21) |
где — длина горизонтальной проекции порожнего участка рабочей ветви конвейера, м; Hп — высота вертикальной проекции участка, м.
Сопротивление (Н) на прямолинейном участке холостой ветви конвейера
Fх = wg(  Lх + qт Lх + qт  ) ± qтgHх, ) ± qтgHх,
| (5.22) |
Здесь первый член выражения в скобках относится к холостым участкам только ленточного конвейера (Lх — длина холостого участка, м), для которых
=  , ,
| (5.23) |
где — погонная масса вращающихся частей роликоопор холостой ветви конвейера, кг/м; тх — масса вращающихся частей одной роликоопоры холостой ветви конвейера (ориентировочно равна 0,6 всей массы роликоопоры), кг; lх — шаг роликоопор холостой ветви конвейера, м; — длина горизонтальной проекции участка холостой ветви конвейера, м; Hх — высота вертикальной проекции участка, м.
Знак плюс в формулах (5.21), (5.22) принимается при перемещении груза вверх, знак минус — при перемещении вниз.
Сопротивление (Н) на криволинейном участке трассы при огибании лентой батареи роликоопор:
а) при выпуклой ленте
| Fкр = Fнаб (k – 1), | (5.24) |
где Fнаб — натяжение ленты в начале участка, Н; k — коэффициент, учитывающий увеличение натяжения ленты от сопротивления батареи роликоопор,
| k = еп, | (5.25) |
w — см. табл. 6.19; a — центральный угол криволинейного участка, рад: a =1,06... 1,08 рад;
б) при вогнутой ленте сопротивление равно нулю.
Сопротивление (Н) на поворотных пунктах при приближенных расчетах принимают
| Fпов = Fнаб (kп – 1), | (5.26) |
где Fнаб — натяжение тягового органа в точке набегания на барабан (звездочку) поворотного пункта, Н; kп — коэффициент увеличения натяжения тягового органа от сопротивления на поворотном пункте.
При угле обхвата тяговым органом барабана (звездочки): a = 90° - kп = = 1,03...1,05; a = 180° - kп = 1,05...1,07.
Сопротивление (Н) на погрузочном пункте при сообщении грузу скорости тягового органа можно принять
| Fпогр » Qgu/36, | (5.27) |
где Q — производительность конвейера, т/ч; u — скорость перемещения груза, м/с.
Сопротивление (Н) от направляющих бортов загрузочного лотка при приближенных расчетах
| Fл » 50l, | (5.28) |
где l — длина лотка, м.
Сопротивление (Н) очистительных устройств конвейера
| Fоч = wочВ, | (5.29) |
где wоч — коэффициент сопротивления очистительного устройства, Н/м: для скребков и плужков wоч = 300...500 Н/м, для вращающихся щеток wоч = 150...250 Н/м; В — ширина рабочего органа (ленты, настила и др.), м.
Сопротивление (Н) плужкового разгрузчика ленточного конвейера
| Fпр » (27...36)qВ, | (5.30) |
Сопротивление (Н) двухбарабанного разгрузочного устройства ленточного конвейера
Fбр = (Fр + qgh)k  , ,
| (5.31) |
где Fр — наибольшее натяжение ленты в конце разгрузочного устройства, Н; h — высота подъема груза на разгрузочном устройстве, м; kп — коэффициент увеличения натяжения ленты от сопротивления на поворотных пунктах [см. (5.26)].
Наименьшее допустимое натяжение (Н) тягового органа:
для ленточного конвейера
| Fmin » (50...100) (q + qл) lр. | (5.32) |
Большие значения Fmin принимаются для быстроходных сильно нагруженных лент; для пластинчатого конвейера Fmin = 1000... 3000 Н; для ленточного элеватора
| Fmin » 0,1F0 > 1000, | (5.33) |
где F0 — тяговая сила (окружное усилие) на приводном барабане, Н; для цепного элеватора
| 500 £ Fmin ³ 50 q. | (5.34) |
Тяговая сила конвейера с тяговым органом определяется [17] методом обхода по контуру (трассе) конвейера, т.е. обхода по точкам сопряжений прямолинейных и криволинейных участков. Эти точки нумеруются начиная от точки сбегания тягового органа с приводного элемента в направлении его движения (рис. 5.1). Обход начинают от точки с наименьшим натяжением. Натяжение в каждой последующей точке равно сумме натяжения в предыдущей точке и сопротивления на участке между этими точками при обходе по ходу тягового органа [см. (5.35)] и их разности — при обходе против хода тягового органа [см. (5.36)];
| Fi+1 = Fi + Fi…(i+1); | (5.35) |
| Fi = Fi+1 – Fi…(i+1), | (5.36) |
где Fi и Fi+1 — натяжение в i-й и (i + 1)-й соседних точках контура; Fi…(i+1) — сопротивление на участке между i-й и (i + 1)-й точками.
| Рис. 5.1. Контур конвейера с нумерацией точек сопряжений прямолинейных и криволинейных участков | 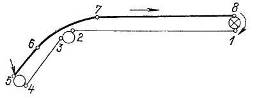
|
| Тяговая сила конвейера F0 = Fнаб — Fсб, | (5.37) |
где Fнаб — натяжение в набегающей на приводной элемент ветви тягового органа (с учетом сопротивлений на поворотном пункте 8-1 (см. рис. 5.1); Fсб — натяжение в сбегающей ветви тягового органа (в точке сбегания с приводного элемента).
Натяжное усилие равно сумме натяжений набегающей и сбегающей ветвей тягового органа у натяжного барабана (звездочки).
Расчет тяговой силы может быть представлен графически. По оси абсцисс графика (рис. 5.2) начиная от точки 1 в масштабе откладывают последовательно длины отдельных участков конвейера (длина участка на поворотном пункте на графике принимается равной нулю), а по оси ординат в масштабе — сопротивление на этих участках. Наименьшее допустимое натяжение тягового органа откладывается вниз от точки с наименьшим натяжением. Отрезки по оси абсцисс 1'—2', 3'—4' и далее на рис. 5.2 соответствуют длинам участков конвейера 1—2, 3—4 и далее на рис. 5.1.
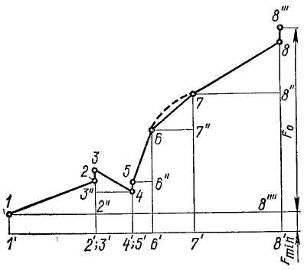 Рис. 5.2. График натяжений тягового органа
(применительно к контуру конвейера по рис. 5.1)
Рис. 5.2. График натяжений тягового органа
(применительно к контуру конвейера по рис. 5.1)
|
Отрезки по оси ординат 2"—2, 3"—3 и далее соответствуют сопротивлению на этих участках, отрезок 8—8"' — сопротивлению на поворотном пункте привода 8—1, отрезок 1—1' — наименьшему натяжению (в данном случае в точке 1), отрезки по оси ординат 1'—1, 2'—2 и далее — натяжению в точках контура 1, 2 и т.д. Отрезок по оси ординат 8""—8'", равный разности отрезков 8'— 8'" Fнаб) и 8'—8"" (Fсб), и есть тяговая сила F0.
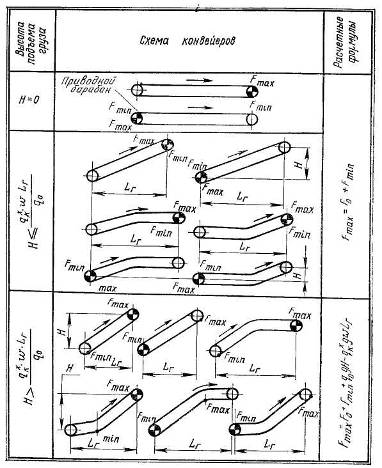
Рис. 5.3. Расположение точек с максимальным и минимальным натяжением
рабочего органа конвейера
На рис. 5.3 показано расположение точек с максимальным и минимальным натяжением рабочего органа конвейера при различных схемах конвейеров.
Длиной участка Li трассы конвейера является расстояние между его начальной i-й и конечной i+1 точками. Номер участка соответствует номеру его начальной точки.
Табл. 5.1.КПД звеньев передач
| Звенья передач | КПД при подшипниках | |
| качения | скольжения | |
| Передаточный вал с обработанными зубчатыми колесами, расположенными в масляной ванне | 0,98 | 0,96 |
| Передаточный вал с обработанными открытыми зубчатыми колесами | 0,97 | 0,85 |
| Передаточный вал с необработанными зубчатыми колесами | — | 0,93 |
| Редуктор зубчатый: | ||
| одноступенчатый | 0,97 | 0,94 |
| двухступенчатый | 0,96 | 0,90 |
| трехступенчатый | 0,94 | 0,85 |
| Цепная передача, работающая в масляной ванне | 0,96 | 0,94 |
| Цепная передача открытая | 0,95 | 0,93 |
| Червячная передача с углом наклона зуба a и углом трения r | h= 
|
Необходимая мощность двигателя конвейера (кВт)
Р =  , ,
| (5.38) |
где F0 — тяговая сила, Н; u — скорость движения тягового органа, м/с; h — КПД механизма привода тягового органа (табл. 5.1).
Момент статических сопротивлений (Н×м) на приводном валу конвейера при торможении, необходимый для предотвращения его обратного хода,
T  = hбар = hбар  , ,
| (5.39) |
где hбар — КПД барабана (звездочки): hбар = 0,96...0,98 (hбар учитывается, если тяговая сила определена приближенно); k — коэффициент возможного уменьшения сопротивлений конвейера: для ленточного конвейера k = 0,55...0,6, для цепного конвейера k = 0,5; D — расчетный диаметр приводного барабана (звездочки), м; значение тяговой силы конвейера подставляется со своим знаком.
Время пуска (разгона) конвейера (с)
tп =  < 3…6 с, < 3…6 с,
| (5.40) |
где С = 9,55 kу [(q + qл) Lг + qл (Lп + Lх) + (q  Lр + q
Lр + q  Lх + mб) kс]u2.
Lх + mб) kс]u2.
Момент сил инерции на валу двигателя (Н×м) при пуске конвейера
| Тин = Тср.п – Тс. | (5.41) |
В формулах (5.40) и (5.41): d, I, n, u, h— см. пояснения к формулам (1.36)...(1.53); q, qл, q , q — см- пояснения к формулам (5.17), (5.18) и (5.23); Lг, Lп - длина соответственно груженого и порожнего участков рабочей ветви, м; Lх, Lр - длина соответственно холостой и рабочей ветвей конвейера, м: Lр = Lг + Lп; kу - коэффициент, учитывающий упругость тягового органа, благодаря которой не все элементы конвейера приходят в движение одновременно: для резинотканевых лент kу = 0,5...0,7, для резинотросовых лент kу = 0,85...0,95; для цепей kу = 0,85...0,95 (меньшие значения - для конвейеров длиной более 100 м; большие - для коротких конвейеров); mб - масса вращающихся барабанов конвейера, кг; kс - коэффициент, учитывающий уменьшение скорости вращающихся частей конвейера относительно скорости тягового органа: для ленточных конвейеров kс = 0,7...0,9; для цепных конвейеров kс = 0,5... 0,7; Тср.п - средний пусковой момент двигателя [см. (1.89) и (1.90)], Н×м; Тс - момент статических сопротивлений на валу двигателя, Н×м:
Тс.= Тс.в  , ,
| (5.42) |
где и — передаточное число привода; Тс.в — момент статических сопротивлений на приводном валу конвейера, Н×м,
| Тс.в.= 0,5F0D, | (5.43) |
где D — диаметр приводного барабана или приводной звездочки конвейера, м.
Момент сил инерции на приводном валу (Н×м) при пуске конвейера
| Тин.в.= Тиниh, | (5.44) |
Момент от сил инерции и статических сопротивлений на приводном валу (Н×м) припуске (разгоне) конвейера
| Тпуск = Тин.в + Тс.в, | (5.45) |
Окружное усилие (Н) на приводном барабане (звездочке) при пуске конвейера
| Fпуск = (2Тпуск)/D, | (5.46) |
Усилие (Н) в набегающей на приводной барабан ветви ленты конвейера при пуске
F  = ks Fпуск, = ks Fпуск,
| (5.47) |
где ks — см. формулу (6.20).
Усилие (Н) в набегающей на приводные звездочки ветви цепного тягового органа при пуске
| F = Fпуск+ Fдин+ Fсб,
| (5.48) |
где Fдин— динамическая нагрузка на цепи [см. (8.11)]; Fсб — натяжение ветви тягового органа, сбегающей с приводной звездочки; Fсб = Fmin.
Коэффициент перегрузки тягового органа при пуске конвейера
| kпер= F /Fдоп < 1,5,
| (5.49) |
где Fдоп — допускаемая нагрузка на тяговый орган. Для резинотканевых конвейерных лент в соответствии с формулой (6.16) Fдоп £ kрВz; для резинотросовых лент [см. (6.17)] Fдоп £ Вc(Fт/t), для пластинчатых тяговых цепей [см. (8.14)] Fдоп £ Fразр/k.
Момент сил инерции на валу двигателя (Н×м) при торможении
Т  = =  , ,
| (5.50) |
где tт — время торможения конвейера, определяемое в предположении линейного изменения во времени скорости u до полной остановки, с.
Максимальный путь торможения конвейера lт, работающего в технологической цепи (во избежание засыпки грузом узла перегрузки), можно принять равным 2...3 м. При этом время торможения (с) конвейера
| tт =(2 lт)/u. | (5.51) |
Момент сил инерции па приводном валу (Н×м) при торможении конвейера
Т  = Т иh. = Т иh.
| (5.52) |
Расчетный тормозной момент (Н×м) на валу двигателя конвейера, работающего в технологической цепи, аналогично (1.78):
Т  = Т + Т = Т + Т  , ,
|
где Т — момент статических сопротивлений конвейера на валу двигателя при торможении, Н×м:
Т = Т  
| (5.53) |
Расчетный тормозной момент на приводном валу (Н×м) конвейера в этом случае
Т  = Т + Т . = Т + Т .
| (5.54) |
Необходимый тормозной момент на валу двигателя для предотвращения самопроизвольного обратного движения ходовой части конвейера при случайном выключении двигателя и полностью загруженной рабочей ветви тягового органа конвейера определяется по формуле (5.39), правая часть которой должна быть умножена на коэффициент запаса торможения kт = 1,25. Если Т £0, тормоз не требуется.
Тормозное устройство (тормоз или останов) выбирается по большему из определенных выше тормозных моментов. Сведения о тормозах и остановах приводятся в табл. Ш.5.7...Ш.5.14.
Дата добавления: 2017-09-19; просмотров: 1664;