Колебательная система автомобиля
Автомобиль представляет собой многомассовую колебательную систему, которая обладает многими степенями свободы. Как уже упоминалось ранее, массы всех частей автомобиля подразделяются на подрессоренные и неподрессоренные. Подрессоренные опираются на подвеску автомобиля (кузов, рама и закрепленные на них системы и механизмы), а неподрессоренные – на дорогу (мосты, колеса).
Подрессоренные массы колеблются на упругих устройствах подвески (рессоры, пружины, торсионы, пневмобаллоны и др.) с низкими частотами, составляющими 60–150 мин-1, а неподрессоренные – на упругих устройствах подвески и шинах с высокими частотами – 350–700 мин-1.
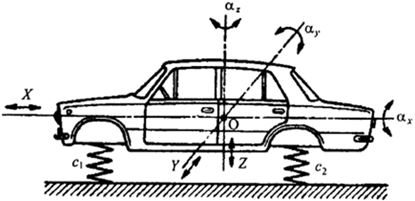
Кузов (рама) автомобиля при движении совершает сложное колебательное движение, перемещаясь поступательно (параллельно самому себе) вдоль трех взаимно перпендикулярных осей х, у, z и одновременно имея угловые перемещения относительно каждой из этих осей. При этом кузов может совершать шесть различных колебаний, соответствующих шести степеням свободы (рис. 12.1, а):
– поступательные вертикальные перемещения относительно вертикальной оси z (подпрыгивание);
– поступательные продольные перемещения относительно продольной оси х (подергивание);
– поступательно поперечные перемещения относительно поперечной оси у (шатание);
– угловые перемещения вокруг поперечной оси у (галопирование);
– угловые перемещения вокруг поперечной оси х (покачивание);
– угловые перемещения вокруг поперечной оси z (рыскание).
За начало координат принимают центр тяжести.
Главное влияние на плавность хода и на самочувствие человека в автомобиле оказывают два вида колебаний: поступательное вертикальное (подпрыгивание) и угловые продольные (галопирование).
 а а
|  б б
|
а – автомобиля как колебательной системы; б – для определения приведенной
жесткости подвески
Рисунок 11.1 – Схема колебаний автомобиля
Колебания в вертикальной плоскости зависят от жесткости упругого элемента подвески и шин.
При определении приведенных жесткостей автомобиля с1 и с2 необходимо знать соответствующие жесткости подвесок и шин передней и задней осей. Для этого учитывают вес автомобиля, приходящийся на ось G1 (G2) жесткость подвески и шин соответственно Cп и Сш (рис. 12.1, б).
Подбирая характеристику упругого элемента к конкретной модели автомобиля, добиваются искомой плавности хода в вертикальной плоскости.
Дня смягчения вертикальных колебаний желательно иметь мягкую подвеску, которая значительно деформируется при переезде препятствия, а для гашения нежелательных медленно затухающих колебаний кузова использовать амортизаторы.
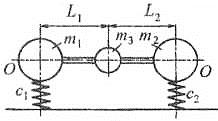
Более сложное влияние на плавность хода оказывает галопирование. Если возмущающая сила Р приложена не к центру упругости, а в другой точке, то возникает как линейное, так и угловое перемещение (рис. 12.2).
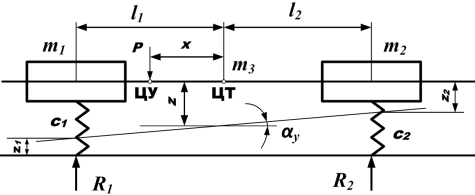
Рисунок 12.2 – Модель колебаний автомобиля
Из условия равновесия системы относительно центра тяжести:

| (12.4) |
где R1 и R2 – реакции опор;
х – расстояние от центра упругости до ЦТ,  .
.
Учитывая, что реакции опор R1 и R2 можно выразить через жесткость и деформации упругих элементов, получим: 
Подставив в выражение для определения расстояния (х) найденные значения R1, R2 и Р, получим:
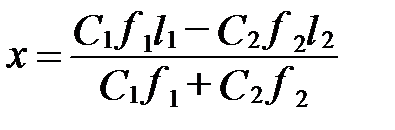
| (12.5) |
Если сила Р приложена к центру упругости, то происходит только линейное перемещение. В этом случае f1 = f2 и галопирование отсутствует, а выражение (12.5) примет вид:
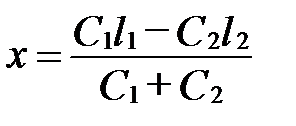
| (12.6) |
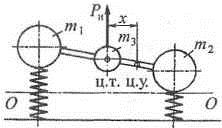
Полученное выражение можно применить к колебаниям кузова, заменив подрессоренную массу тп тремя массами – т1, m2 и т3, связанными между собой невесомым стержнем (рис. 12.3, а). Массы т1 и т2 расположены соответственно на расстояниях l1 и l2 от центра тяжести кузова, а масса т3 находится непосредственно в центре тяжести.
 а
а
|  б
б
|
а – колебательная система эквивалентная подрессоренной массе;
б – положение центра тяжести и упругости
Рисунок 12.3 – Схема для расчета колебаний автомобиля
Чтобы система из этих трех тел была подобна подрессоренной массе автомобиля, должны выполняться следующие условия:
– сумма всех масс системы должна быть равна подрессоренной массе автомобиля: т1 + m2 + т3 = тп;
– центр тяжести системы должен совпадать с центром тяжести подрессоренной массы, т.е. m1l1 = т2l2;
– момент инерции системы относительно горизонтальной оси (у)должен быть равен моменту инерции подрессоренной массы относительно той же оси: m1l21+ m2l22 = тк ρ2к, где ρк – радиус инерции подрессоренной массы автомобиля.
В соответствии с перечисленными условиями определим массы:
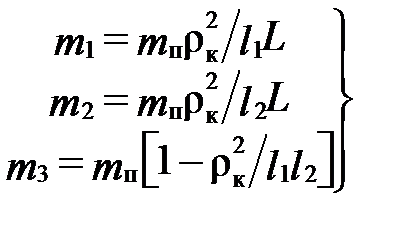
| (12.7) |
Если вывести систему из состояния равновесия, а затем отпустить, то возникнут колебания (рис. 12.3, б), при которых появится сила инерции Ри, равная произведению массы m3 на ускорение колебаний, которая создает момент относительно центра упругости: Ми = Ри·х. Момент инерции во время колебаний будет равен нулю при условии, если m3 = 0 или плечо силы инерции х = 0.
Из системы (12.7) следует, что (m 3 = 0), если (ρ2к / (l1l2) = 1), т.к. (тп ≠ 0). Для легковых автомобилей отношение ρ2к /(l1l2) близко к 1, поэтому они имеют достаточно хорошую плавность хода.
Если центр плеча (х = 0) и центр тяжести совпадает с центром упругости системы, то х = (C1l1 – C2l2) / (С1 + С2) = 0 и С1/С2 = l2 / l1.
Следовательно, жесткость подвесок необходимо выбирать таким образом,чтобы они были обратно пропорциональны расстояниям центpa тяжести от передней и задней осей. Тогда при одинаковых прогибахподвесок кузов будет перемещаться вертикально без галопирования.
Дата добавления: 2017-06-02; просмотров: 877;