Использование метода ограждающих изолинии при ведении промысла в прибрежных районах.
При ведении промысла донными орудиями лова метод ограждающих изолиний используется не только для обеспечения безопасности плавания в районах, стесненных навигационными опасностями, но и для обеспечения сохранности орудий лова на участках с тяжелыми грунтовыми условиями и задевиеты-ми местами. В зависимости от количества находящихся в видимости траулера опорных пунктов применяются методы горизонтального или вертикального угла опасности, а также метод опасного расстояния (при наличии радиолокатора).
а) Применение метода ограждающих изолиний при наличии в видимости траулера двух опорных пунктов.
При наличии в видимости траулера двух опорных пунктов применяется метод горизонтального угла опасности. Сущность этого метода заключается в том, что на промыслово-навигационном планшете или карте прокладывают изолинии (вмещающие окружности), проходящие через опорные пункты и ограждающие опасный для траления участок или отдельные задевы, расположенные вблизи промысловой площадки. Для этого на планшете (карте) опорные пункты А и В соединяют прямой линией и восстанавливают из ее середины перпендикуляр, на котором опытным путем находят центр окружности АСВ, ограждающий участок с неблагоприятным грунтом или место задева (рис. 6.3,а). Любую точку С, лежащую на этой окружности, соединяют прямыми линиями с опорными пунктами и снимают с планшета величину угла опасности LАСВ = α0
Во время траления, при проходе мимо опасности, систематически измеряют секстаном горизонтальный угол α между опорными пунктами A и В.
Если измеренный угол α меньше α0, линия пути траулера располагается в стороне от опасности. Когда траулер находится на ограждающей изолинии, α = α0. Если α > α0, то траулер находится внутри ограждающей изолинии и следует немедленно изменить курс, чтобы выйти за ее пределы.
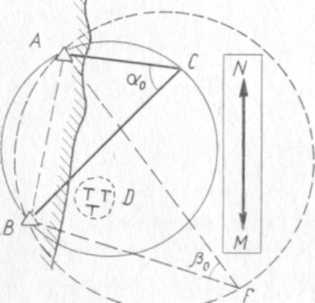
Если промысловая площадка расположена между участками с неблагоприятными грунтами или задевами D и Е, то на промыслово-навигационном планшете или карте строят две ограждающие изолинии (вмещающие окружности) АСВ и АFВ и снимают углы опасности αо и βо.
| т т т |
Е
Рис. 6.3 а
Производя траление на этой промысловой площадке, систематически измеряют секстаном горизонтальный угол между опорными пунктами А и В и, корректируя соответствующим образом курс, добиваются такого положения, при котором измеряемый секстаном угол был бы все время больше угла βо и меньше угла αо.
Для удержания траулера на рекомендованной промысловой изобате, если направление изобаты на данном участке совпадает с дугой одной из вмещающих окружностей, проходящих через опорные пункты А и В, может быть использовано плавание по изолинии. Для этого (рис. 6.3, б) через опорные пункты А и В опытным путем проводят окружность АСDВ, дуга которой на участке траления совпадает с промысловой изобатой, снимают с планшета угол α и устанавливают его на секстане. Следуя с тралом вдоль изобаты и не изменяя отсчета секстана, наблюдают за прямовидимым и отраженным опорным пунктами. Если траулер уклонился от заданной изобаты в сторону опорных пунктов, то отраженный опорный пункт В будет виден в малом зеркале секстана справа от прямовидимого опорного пункта А. Если же траулер уклонился в противоположную сторону, то изображение отраженного опорного пункта расположится в малом зеркале слева от прямовидимого.
Для удержания траулера на заданной изобате маневрирование нужно осуществлять таким образом, чтобы прямовидимый и отраженный опорные пункты были все время совмещенными.
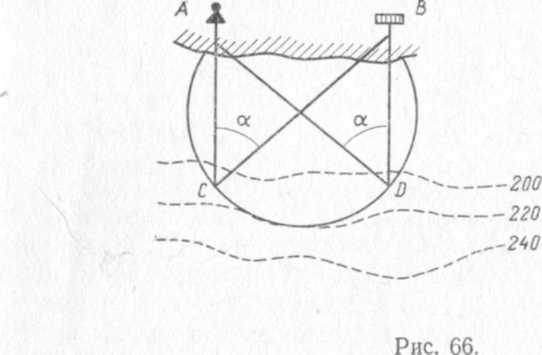
Рис. 6.3.1 а
В качестве примера рассмотрим применение плавания по изолинии для удержания траулера на заданной изобате при работе на промысловой площадке у западного побережья острова Кильдин (рис. 6.3.2, в).
Промысловая практика рекомендует производить траление в этом районе по изобате 65 м, расположенной на расстоянии 3 - 4 кбт от береговой черты, примерно по дуге вмещающей окружности, проходящей через опорные пункты Кильдинский Западный и Кильдинский Северный.
| ┴ |
┴
|
┴ 92 ┴ ┴
| ┴ | ||
| ┴ |
| ||||
| ┴ | Кильликский
| ┴ | |||
| Кильдщкий Западный | |||||
Рис.6.3.2 в
Для построения этой изолинии соединяем на планшете опорные пункты прямой и проводим через ее середину перпендикуляр, на котором опытным путем находим центр О вмещающей окружности. Любую точку С, лежащую на вмещающей окружности, соединяем прямыми линиями с опорными пунктами и снимаем с планшета величину угла α = 93°.
Установив этот угол на секстане, во время траления корректируем курс таким образом, чтобы опорные пункты Кильдинский Северный и Кильдинский Западный наблюдались в малом зеркале все время совмещенными.
б) Применение метода ограждающих изолиний при наличии в видимости траулера одного опорного пункта
Если в видимости траулера имеется только один опорный пункт, то применяется метод вертикального угла опасности или метод опасного расстояния.
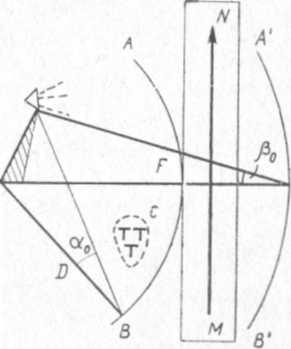
Сущность метода вертикального угла опасности заключается в том, что на промыслово-навигационной планшете или карте из точки, изображающей опорный пункт, как из центра проводят ограждающую окружность (изолинию) таким образом, чтобы опасный для траления участок С располагался в ее пределах
(рис. 6.3,б).
Сняв с планшета радиус окружности D и, зная высоту опорного пункта над уровнем моря, рассчитывают вертикальный угол опасности по формуле:
tg αo = H/1852D
где: Н - высота опорного пункта, м;
D - радиус окружности опасности, мили.
Затем значение ао исправляют величиной погрешности индекса с обратным знаком, т. е. α0′ = αо – i.
Во время траления систематически измеряют вертикальный угол между вершиной и основанием опорного пункта. Если измеренный угол меньше αо′, то это значит, что траулер находится за пределами ограждающей изолинии. Если он равен αо′, траулер находится на ограждающей изолинии и следует немедленно привести опорный пункт на траверз, чтобы отойти от него.
Когда промысловая площадка расположена между двумя неблагоприятными для траления участками или задевами С и Е, то на планшете (карте) проводят две ограждающие окружности АFВ иА'GВ', снимают радиусы этих окружностей и рассчитывают углы αо′и βо′. Во время траления на данной промысловой площадке систематически измеряют секстаном вертикальный угол между вершиной и основанием опорного пункта и, корректируя соответствующим образом курс, добиваются такого положения, при котором измеряемый секстаном угол был бы все время меньше угла αо'и больше угла βо′.
| т т т |
Рис. 6.3 б
Может встретиться случай, когда в видимости траулера имеется только один навигационный ориентир, нанесенный на карте, но высота его над уровнем моря неизвестна. Этот ориентир также можно использовать для построения ограждающей изолинии и применения метода вертикального угла опасности.
Для расчета вертикального угла опасности нужно предварительно определить высоту ориентира над уровнем моря. Эту задачу можно решить следующим образом. Курс траулера необходимо изменить так, чтобы ориентир находился прямо по курсу. В некоторой точке А секстаном измеряют угол α1 между вершиной и основанием ориентира (рис. 6.3.1 б). Через некоторое время, когда траулер будет находиться в точке В, вновь измеряют угол аг между вершиной и основанием ориентира.
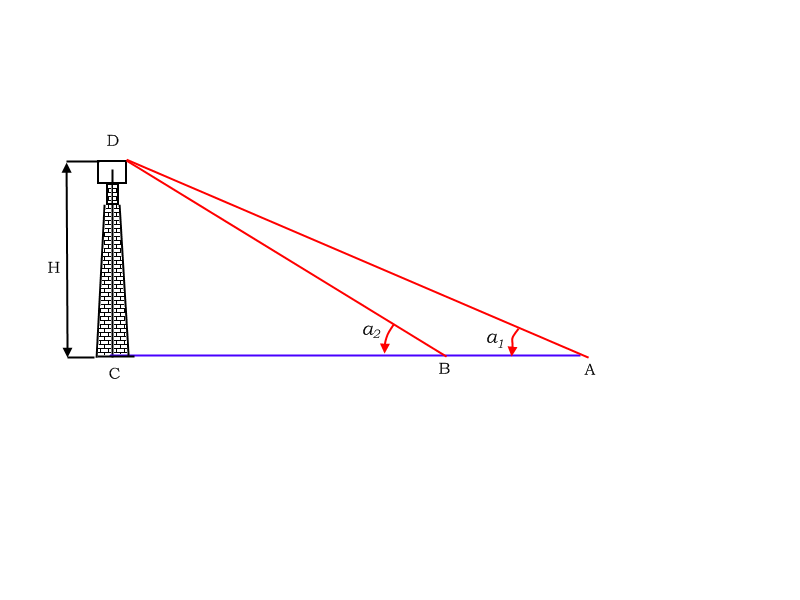
Рис. 6.1.1 б
Расстояние S между точками А и В определяют по счислению.
Тогда:
АС = ВС + S
или
H ctg α1 = H ctg α2 + S
откуда
H = S / (ctg α1 - ctg α2)
Путем несложных преобразований последнюю формулу легко привести к виду
H = ((ctg α1 ctg α2) / (ctg α1 - ctg α2)) S
При углах а, не превышающих 5°, с точностью до третьего десятичного знака можно принять tgα = α
Обозначив также α2 – α1= Δα, получим:
H = ((α1(α1 + Δα))/ Δα)S
В этой формуле высота H и пройденное расстояние S выражены в одинаковых единицах, а углы — в радианах.
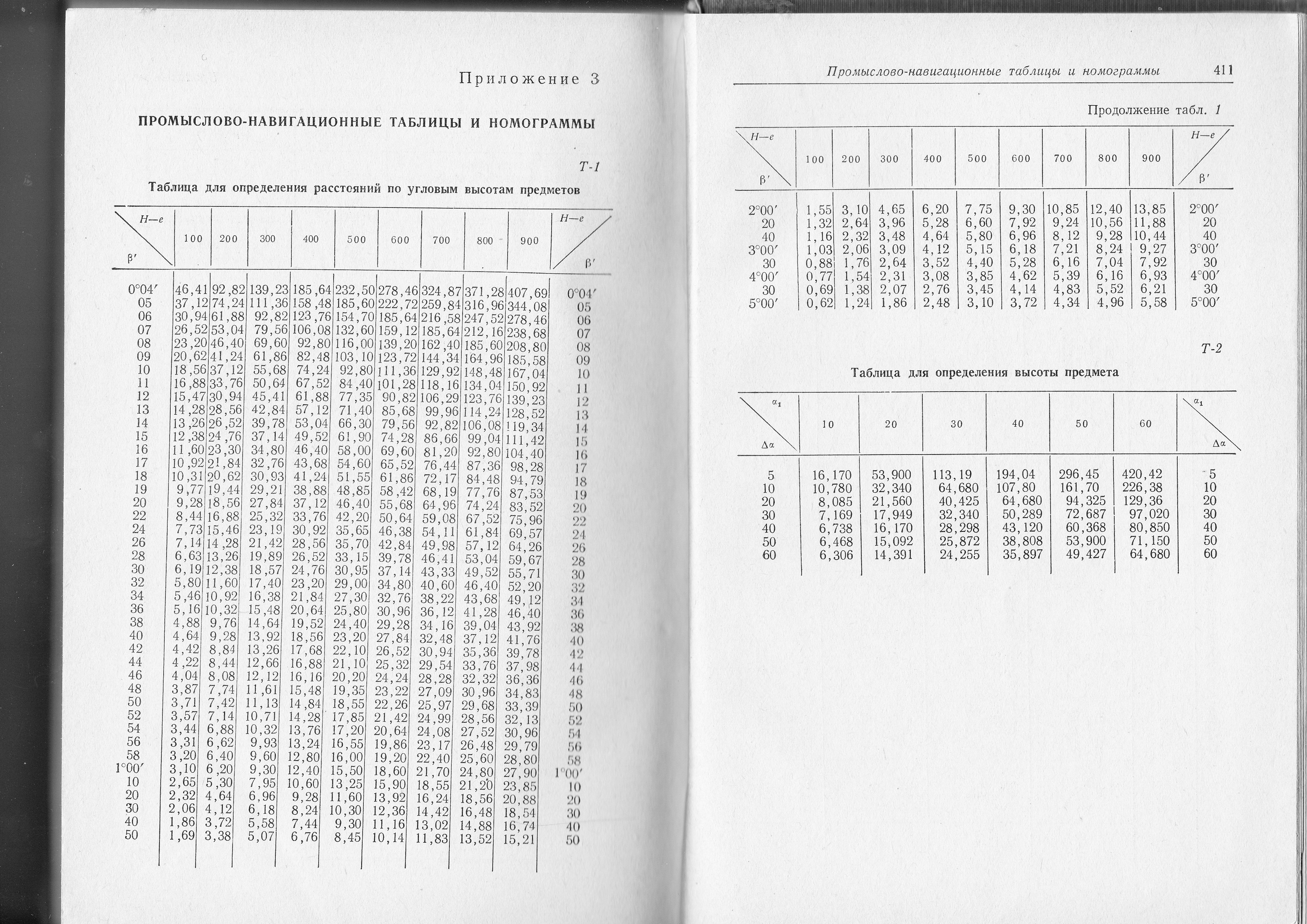
Если расстояние 5 выразить в милях, а утлы в минутах дуги, то для расчета высоты предмета в метрах окончательно получим:
H = 0.539 (((α1(α1 + Δα))/ Δα)S)=р S
Для облегчения расчетов по этой формуле составлена табл. Т-2, которая позволяет определить величину р по аргументам α1 и Δα.*
*Табл. Т-2 может быть применена только тогда, когда измеряется угловая высота предмета, основание которого видимо над горизонтом. Если основание предмета скрыто под горизонтом, то разность углов Δα необходимо исправить отрицательной поправкой. Величина этой поправки в угловых минутах численно равна плаванию судна 5 в милях.
Пример 1. Находясь в некоторой точке А проложим курс на приметный ориентир. Измеренный секстаном угол α1 между его вершиной и основанием равен 0 31'. Пройдя 2,4 мили, вновь измерили угловую высоту предмета, которая оказалась равной α2 = 0о52'.
Решение: Рассчитываем Δα =0°21′ и из табл. Т-2 выбираем р = 41,290. Таким образом, высота ориентира p = 41,290 ∙ 2,4 = 99,1 м.
После определения высоты ориентира над уровнем моря построение на планшете (карте) ограждающей изолинии и расчет вертикального угла опасности производится рассмотренным выше способом.
Метод опасного расстояния можно применять в том случае, если с траулера виден точечный радиолокационный ориентир, например промысловый буй, снабженный пассивным отражателем. Тогда на промыслово-навигационном планшете (карте) из точки, изображающей ориентир, как из центра проводят ограждающую изолинию (окружность) таким образом, чтобы опасный для траления участок С располагался в ее пределах, и снимают радиус О этой окружности.
Если на вооружении траулера имеется радиолокатор с подвижным крутом дальности (ПКД), то величина снятого с планшета радиуса ограждающей окружности устанавливается при помощи счетчика дальномера на экране индикатора. Во время траления, корректируя соответствующим образом курс, удерживают изображение ориентира за пределами подвижного круга дальности.
Если на траулере имеется радиолокатор с неподвижными кругами дальности (НКД), величину радиуса ограждающей окружности удобно выбирать таким образом, чтобы радиолокационный ориентир находился за пределами одного из неподвижных кругов дальности на данной шкале прибора.
Если по какой-либо причине подобный выбор радиуса невозможен, то на экране радиолокатора место окружности, соответствующей опасному расстоянию, определяется путем интерполяции на глаз между неподвижными кругами дальности. При тралении нужно корректировать курс таким образом, чтобы изображение ориентира находилось за пределами этой мысленно проведенной на экране радиолокатора окружности.
Чтобы обеспечить следование траулера с тралом по заданной изобате или в заданном диапазоне промысловых глубин, можно использовать специальный сигнализатор изменения глубины в виде отдельной блок-приставки к эхолоту.
Дата добавления: 2017-06-02; просмотров: 859;