Использование метода относительной прокладки на промысле.
На промысле при расхождении с другими судами и при облове быстроподвижных косяков рыбы приходится решать следующие задачи:
1) определять элементы движения встречного судна или косяка рыбы по данным радиолокационных или гидролокационных наблюдений;
2) выбирать новые элементы движения своего судна для расхождения с другим судном или для выхода на подвижной косяк рыбы.
Осуществляя расхождение с другим судном или выход на подвижной косяк, наше судно изменяет позицию относительно подвижного объекта (объекта маневра). Изменение позиции маневрирующего судна относительно подвижного объекта называется двухсторонним маневрированием.
По способу выполнения различают маневрирование на постоянных курсах (прямолинейное маневрирование), маневрирование на постоянных курсовых углах и смешанное маневрирование.
При расхождении с другим судном выполняется маневрирование на постоянных курсах (прямолинейное маневрирование). Такой способ маневрирования может применяться и при облове разноглубинным тралом быстроподвижных косяков рыбы. Однако в этом случае значительно более широкое распространение получило смешанное маневрирование — такой способ, маневрирования, при котором, например, объект маневра перемещается постоянным курсом, а маневрирующее судно удерживает этот объект на постоянном курсовом угле. Путь объекта маневра, перемещающегося постоянным курсом, изобразится на карте в меркаторской проекции прямой линией, а путь судна, маневрирующего на постоянном курсовом угле, будет криволинейным.
При графическом решении задач на листе бумаги или на промыслово-навигационной планшете треугольник путей или скоростей строят обычно приемом обратного построения. Рассмотрим определение элементов движения встречного судна методом относительной прокладки (рис. 4.3). Из точки М0, принимаемой за место своего судна (свое судно считаем неподвижным), прокладываем снятые с экрана радиолокатора пеленг П1 и расстояние D1 до встречного судна и по ним наносим точку Ко. Затем через промежуток времени, равный обычно 3 или 6 мин, дважды снимаем с экрана радиолокатора П2, D2 и П3, D3. Прокладываем их от точки М0, получаем точки К1 и К2. Через точки Ко, К1 и К2 проводим прямую, которая представляет собой линию относительного курса.
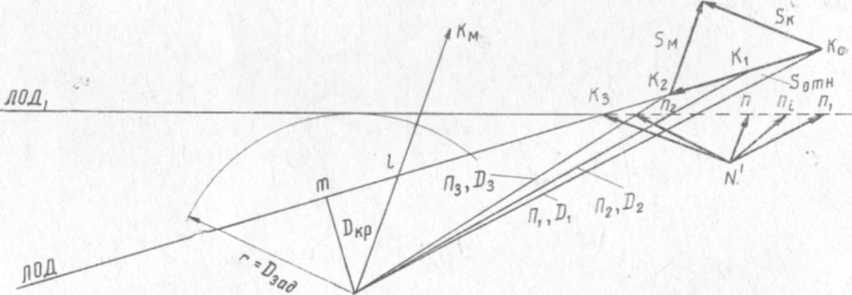 Эту линию называют также линией относительного движения (ЛОД).
Эту линию называют также линией относительного движения (ЛОД).
| N |
| Т |
Рис. 4.3
Для определения истинного курса и скорости встречного судна приемом обратного построения строим на линии относительного движения треугольник путей. Из точки К2 откладываем в сторону движения своего судна вектор пути Sм за время между наблюдениями. Затем соединяем конец этого вектора (точку N) с точкой Ко. Треугольник КоК2N представляет собой треугольник путей. В этом треугольнике сторона КоК2 — вектор относительного пути Sотн встречного судна за время между наблюдениями, сторона КоN — вектор пути Sк встречного судна за то же время. Сняв направление вектора Sк, получаем истинный курс встречного судна, а частное от деления модуля этого вектора на время между наблюдениями равно скорости встречного судна.
Длина перпендикуляра М0m, опущенного из точки М0 на линию относительного движения, определит кратчайшее расстояние Dкр, на которое сблизятся суда.
Время сближения на Dкр (от момента начала наблюдений) будет равно:
tкр = К0m / Vотн
При относительной прокладке также просто определяется и расстояние Опер, на котором встречное судно пересечет курс нашего судна.
На рис. 4.3 Dпер = М0ℓ. Время пересечения курса (от момента начала наблюдений) равно:
tпер = К0ℓ / Vотн
Аналогично определяются по данным гидролокационных наблюдений направление и скорость перемещения косяка рыбы при прямолинейном маневрировании.
Часто бывает необходимо обеспечить расхождения со встречным судном на заданном расстоянии Dзад или при прямолинейном маневрировании выйти на ядро подвижного косяка рыбы (Dзад = 0).
Для этого необходимо изменить направление линии относительного движения, что может быть достигнуто либо изменением курса, либо изменением скорости, либо одновременным изменением курса и скорости своего судна.
Предположим, что необходимо изменить направление линии относительного движения так, чтобы разойтись со встречным судном в расстоянии, равном D3ад, сохраняя прежней скорость своего судна (рис. 4.3).
Для решения этой задачи из точки М0 проводим окружность радиусом, равным Dзад. Затем из наперед заданной по времени точки Кз на первоначальной линии относительного движения прокладываем новую линию относительного движения К3Т, касательную к этой окружности. После чего в точку Кз проводим вектор пути встречного судна Sк и получаем точку N'(К3N′ = КоN, КзN' || КоN). Из этой точки радиусом, равным модулю вектора пути своего судна Sм, делаем засечки на новой линии относительного движения. Получаем точки n1 и n2. Направления векторов N'n1 и N'n2 определяют новые курсы нашего судна, поворот на которые позволит осуществить расхождение со встречным судном на заданном расстоянии. Обычно при других равных условиях предпочтение отдается курсу, при котором скорость относительного движения больше. На рис. 4.3 это курс N′n1. При таком курсе относительная скорость равна N′Кз, а при курсе N'n2 она равна n2Кз (n1К3>n2К3)*
Если окружность радиуса SМ с центром в точке N' не пересекает линии относительного движения, то это указывает на невозможность расхождения на заданном расстоянии только путем изменения курса.
*Из точки Кз (рис. 4.3) можно провести и вторую касательную к окруж ности r = Dзад, которая также будет ЛОД, обеспечивающей расхождение на заданной дистанции (на рис. 4.3 не показана). Таким образом, задача имеет несколько решений, из которых выбирается одно с учетом других обстоятельств плазапия (наличие вблизи курса других судов, навигационных опасностей и т. п.).
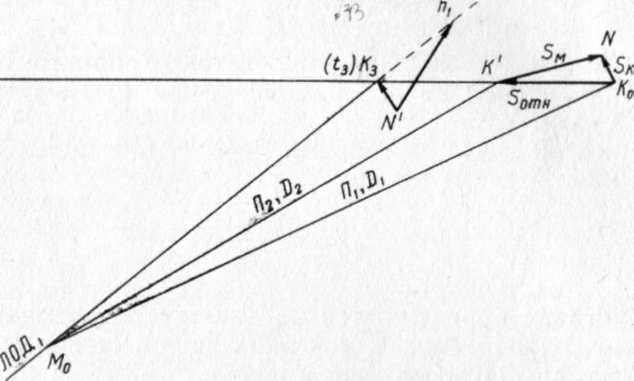
Когда при прямолинейном маневрировании решается задача выхода судна на подвижной косяк рыбы, то Dзад = 0. В этом случае из точки Кз прокладываем новую линию относительного движения так, чтобы она проходила через точку М0 (рис. 4.3.1).
| Рис. 4.3.1. |
| ЛОД |
Затем из точки N' радиусом, равным Sм, делаем засечку на продолженной в обратном направлении новой линии относительного движения. Полученную точку n1 соединяем с точкой N'. Направление вектора N'n1 определит курс, на который нужно лечь в точке Кз (момент tз), чтобы выйти на ядро подвижного косяка рыбы.
Заметим, что при выходе на подвижной косяк рыбы необходимое изменение направления линии относительного движения, как правило, осуществляется путем изменения курса промыслового судна, а не его скорости.
Относительная прокладка может быть быстро выполнена на специальных планшетах, получивших название «маневренный». Маневренный планшет может быть изготовлен на бумаге или представлять собой механическое устройство. На судах флота рыбной промышленности наиболее широкое распространение получили отпечатанные на бумаге типографским способом специальные бланки.
Такой бланк представляет собой сетку системы полярных координат, состоящую из ряда концентрических окружностей, проведенных на равном расстоянии друг от друга, и радиальных прямых, нанесенных через 10°. По внешней окружности нанесены градусные деления от 0 до 360° по направлению часовой стрелки.
Вдоль радиальных прямых, расположенных по направлениям главных румбов, указаны различные линейные масштабы, которые могут быть использованы при прокладке. Диаметр внешней окружности, обозначенный 0—180°, соответствует истинному меридиану или диаметральной плоскости судна в зависимости от того, как ориентированы изображения на экране радиолокатора.
Определение элементов движения встречного судна или подвижного косяка рыбы производится на таком планшете следующим образом.
Центр планшета О принимаем за место своего судна М, которое считаем неподвижным (рис. 4.3.2).
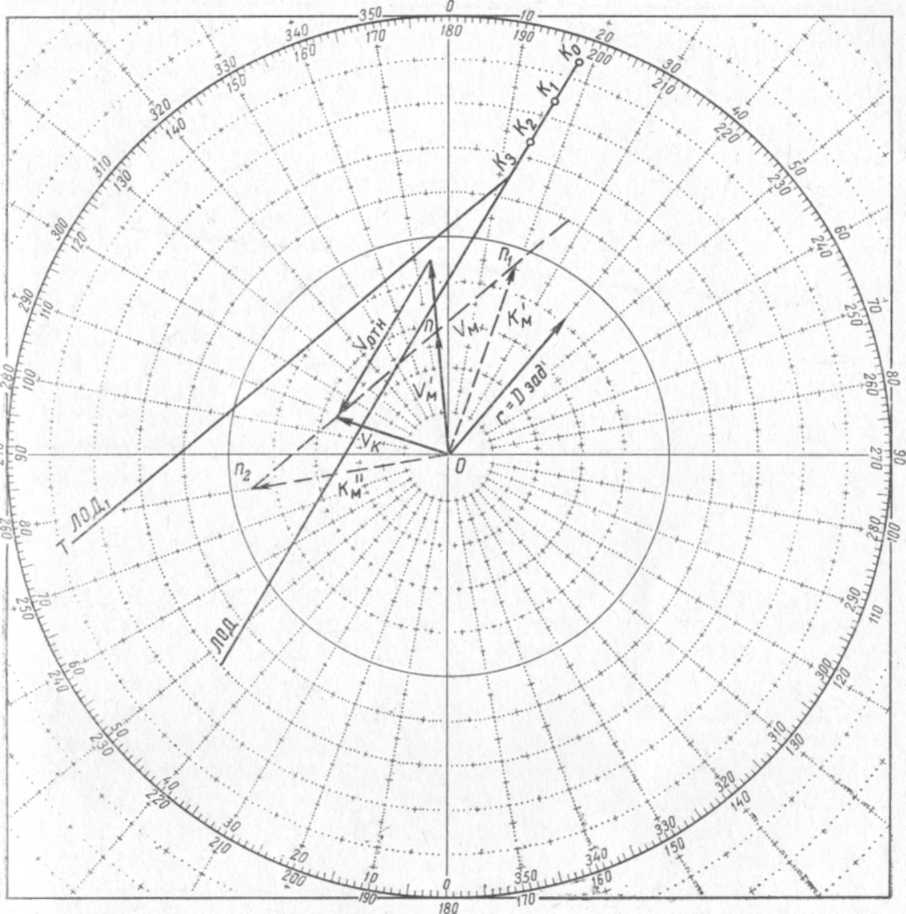
Рис. 4.3.2
По наблюденным пелентам и расстояниям, выбрав удобный масштаб, наносим на планшет точки Ко, К1 и К2, определяющие положения объекта маневра Котносительно маневрирующего судна М в моменты наблюдений (при определении элементов движения косяка рыбы обычно ограничиваются измерением П1D1 и П2D2 и нанесением точек Ко и К1).
Соединив эти точки прямой, получаем линию относительного движения. Разделив расстояние между точкой Ко и последующими точками на соответствующий промежуток времени, находим величину относительной скорости Vотн встречного судна или косяка рыбы.
Затем при центре планшета приемом прямого построения строим треугольник скоростей, используя любой из масштабов.
Вектор скорости встречного судна (косяка) Vк определит его истинный курс и скорость. При работе на планшете скорости удобнее считать не в узлах, а в кабельтовых в минуту (6 узлов =1 кбт/мин).
Как видно из рис. 4.3.2, имея на планшете линию относительного движения и линию истинного курса встречного судна, нетрудно определить расстояние и время кратчайшего сближения судов, а также расстояние и время пересечения встречным судном курса нашего судна.
Предположим, что необходимо изменить направление линии относительного движения так, чтобы разойтись со встречным судном в расстоянии, равном Dзад, сохраняя прежней скорость своего судна. Для решения этой задачи из наперед заданной по времени точки Кз на первоначальной линии относительного движения проводим касательную к окружности радиуса, равного Dзад. Линия К2Т будет представлять собой новую линию относительного движения. После этого через конец вектора скорости встречного судна Vк проводим прямую, параллельную новой линии относительного движения. Точки пересечения пи п2. этой линии с окружностью планшета, соответствующей в выбранном масштабе скорости своего судна, соединяем с центром планшета О.
Направления векторов Оn1 и Оn2 определяют курсы нашего судна, поворот на которые обеспечит необходимое изменение направления линии относительного движения.
Обычно при других равных условиях предпочтение отдается курсу, при котором относительная скорость будет больше. На рис. 4.3.2 это курс Оn1.
Если при прямолинейном маневрировании решается задача выхода на подвижной косяк рыбы, то Dзад = 0. Поэтому точку Кз соединяем с центром планшета О (рис. 4.3.3).
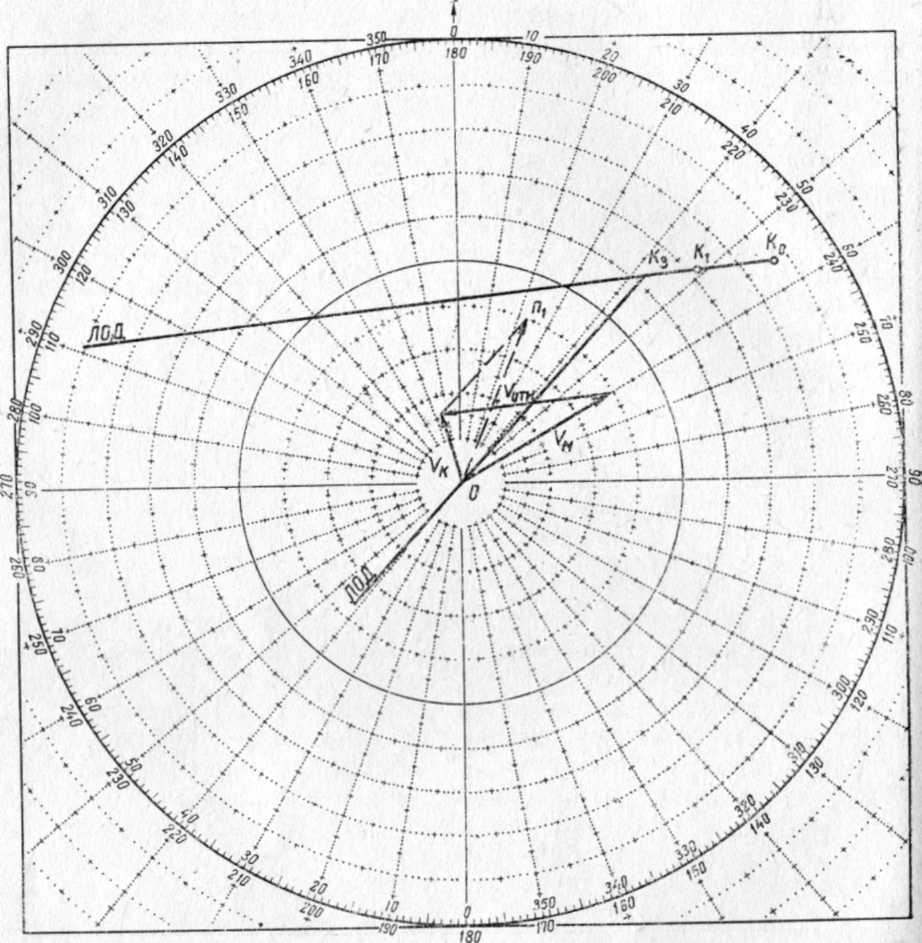
Рис. 4.3.3
Линия КзО будет представлять собой новую линию относительного движения. Затем из конца вектора скорости перемещения косяка Vк проводим прямую, параллельную этой новой линии относительного движения, в сторону точки Кз. Точку n1 пересечения этой прямой с окружностью планшета, соответствующей в выбранном масштабе скорости нашего судна, соединяем с центром планшета О. Направление вектора Оn1 определит курс, на который следует течь в точке Кз, чтобы выйти на ядро подвижного косяка.
Если при расхождении со встречным судном направление линии относительного движения целесообразно осуществить путем изменения скорости своего судна, сохраняя прежним его курс, то на планшете выполняется следующее построение. Из конца вектора скорости встречного судна Vк проводим в обратном направлении линию, параллельную новой линии относительного движения, до пересечения с вектором скорости Vм своего судна (рис. 4.3.2). Обозначим точку пересечения через n. Тогда модуль вектора Оn определит новую скорость нашего судна, обеспечивающую необходимое изменение направления линии относительного движения.
Когда при маневрировании относительно косяка или встречного судна приходится менять курс (более чем 20—30°) или скорость, следует иметь в виду, что предварительные расчеты, сделанные в предположении, что курс и скорость меняются мгновенно, будут содержать ошибки, которые могут достигать при небольших дистанциях значительной величины. В принципе возможно учесть влияние циркуляции и времени, необходимого для изменения скорости, еще на стадии предварительных расчетов, но сделать это трудно. Поэтому на практике поступают так: в ходе осуществления маневра регулярно наблюдают пеленг и дистанцию до цели, прокладывая их на маневренный планшет. Относительный путь цели, получаемый на планшете, позволяет скорректировать маневр своего судна небольшими изменениями расчетных курса или скорости (или обоих вместе).
Графические приемы прокладки обсервованного места судна при нахождении ориентиров за пределами рамок промыслово-навигационного планшета (карты)
В связи с тем что промысловое судовождение предъявляет высокие требования к точности счисления пути судна, прокладка, как правило, ведется на промыслово-навигационных планшетах или картах крупного масштаба.
Однако при ведении промысла на удаленных от берега участках выбор масштаба планшета или карты ограничен условием: опорные пункты, по которым определяют место судна, должны помещаться внутри рамок планшета или карты. Это часто заставляет использовать мелкомасштабные планшеты (карты), на которых точное ведение промыслового счисления затруднено, либо применять неудобные в обращении крупномасштабные планшеты с размерами рамок, значительно превышающими стандартный формат рамок морской навигационной карты. Некоторые приемы определения места судна при нахождении опорных пунктов за рамкой планшета были разработаны А. П. Ковалевым. Однако эти приемы дают возможность решать только частную задачу — прокладку на планшете линий пеленгов.
Ниже рассмотрен прием, позволяющий решать задачу в общем виде и достаточно просто наносить на крупномасштабный промыслово-навигационный планшет (карту) стандартного формата любые обсервации: по углам, пеленгам и расстояниям до опорных пунктов, находящихся за рамками планшета (карты).
а) Прокладка определений места по двум пеленгам
Предварительная подготовка промыслово-навигационного планшета (карты) сводится к нанесению тушью на планшет центральной точки О и условных мест А' и В' ориентиров (рис. 5.1, а). Во время промысла пеленги прокладывают от точек А' и В'. Для получения обсервованного места траулера (точка Р) достаточно соединить прямой линией точку Р' с центральной точкой планшета и на продолжении этой прямой отложить расстояние, равное ОР'.
б) Прокладка определений места по двум расстояниям
Из условных мест ориентиров (точки А1 и В1) как из центров проводят окружности радиусом ½ D1 и ½ D2 (Рис. 5.1,б). Полученную точку Р′ соединяют прямой линией с цнтральной точкой планшета и на продолжении этой прямой откладывают расстояние, равное ОР′.
в) Прокладка определений места по пеленгу и расстоянию
От условного места ориентинра (например, А') прокладывают линию ОИП и по этой линии откладывают половину измеренного расстояния, т. е. величину ½ D
Обсервованное место траулера Р можно найти описанным выше приемом
(рис. 5.1, в).
На практике маловероятен случай, при котором ориентиры А, В и С могут оказаться за пределами полученных рассмотренным приемом условных рамок М'N'L'К', а условные ориентирыА', В' и С′ - за пределами рамок промыслово-навигационного планшета (карты).
Однако, когда береговые ориентиры находятся далеко за рамками планшета и уменьшение масштаба построений вдвое недостаточно для нанесения их условных мест на планшет, масштаб следует уменьшить в 3—4 раза с тем, чтобы условные места всех опорных пунктов оказались в пределах рамок планшета. Если при предварительной подготовке масштаб построений был уменьшен в n раз по сравнению с масштабом планшета, то для нахождения действительного места судна (точка Р) расстояние ОР' следует увеличить в n раз и отложить его от центральной точки планшета на продолжении прямой ОР'.
| |

Рис. 5.1
Сетки изолиний и приемы их построения на промыслово-навигационных планшетах.
 При ведении промысла в прибрежных районах прокладку обсерваций можно значительно упростить и ускорить, применяя предварительно построенные на промыслово-навигационном планшете или карте сетки изолиний: гониометрическую, стадиометрическую, комбинированную и др.
При ведении промысла в прибрежных районах прокладку обсерваций можно значительно упростить и ускорить, применяя предварительно построенные на промыслово-навигационном планшете или карте сетки изолиний: гониометрическую, стадиометрическую, комбинированную и др.
Рис. 6.1
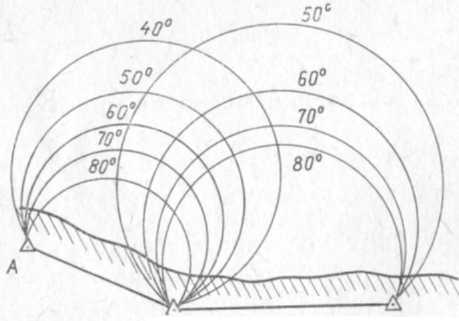
Гониометрическая сетка (рис. 6.1) применяется, как известно, при определении места траулера по двум горизонтальным углам и образуется дугами окружностей, вмещающих измеренные углы. Каждая из дуг является геометрическим местом вершин вписанных углов, опирающихся на два опорных пункта. На планшете сперва проводят дуги одной системы вмещающих окружностей для равноотстоящих значений углов α, а затем — другой для углов β. Около каждой изолинии подписывают цифры градусов того угла, который вмещает данная окружность.
Во время промысла, измерив горизонтальные углы αиβ, интерполированием на глаз между изолиниями, нанесенными на планшете, проводят карандашом в районе счислимого места дуги, соответствующие сначала одному, а затем другому углу. В точке пересечения этих дуг находят обсервованное место Р.
Опыт использования гониометрической сетки на промысле показывает ее преимущества перед всеми другими приемами прокладки места на планшете. Прокладка обсервованных мест выполняется просто, быстро и одинаково независимо от того, где находятся ориентиры— в пределах рамок планшета или вне их.
Углы пересечения изолиний и расстояния между ними характеризуют точность определения места на различных участках района промысла, охватываемого данным планшетом.
Гониометрическая сетка позволяет осуществлять уверенное траление на узких промысловых площадках, в районах, где имеются задевы и навигационные опасности. Так, например, для выхода в назначенную точку А спуска трала снимают с гониометрической сетки значения соответствующих точке А углов α и β и ложатся на курс, направленный в эту точку. Следуя в точку А, определяют место по двум углам и при помощи гониометрической сетки быстро прокладывают полученные обсервации на планшете. Руководствуясь обсервациями, корректируют курс, добиваясь того, чтобы назначенная точка все время находилась прямо на носу. Следуя, таким образом, переменными курсами, достигают назначенной точки спуска трала.
Указанным приемом можно обеспечить выход траулера в назначенную точку спуска трала курсом, близким к рекомендованному промысловому курсу, что позволит избежать лишних поворотов во время траления.
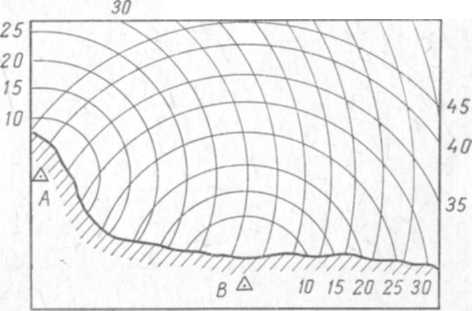
Стадиометрическая сетка (рис. 6.1.1) применяется при определении места траулера по расстояниям до двух ориентиров и позволяет достаточно просто выполнить все графические построения, связанные с нанесением обсерваций на промыслово-навигационный планшет. Она образуется двумя или несколькими системами концентрических окружностей (изостадий). Центр каждой системы изостадий — ориентир, до которого определяется расстояние.
При определении расстояний по измеренному секстаном вертикальному углу около каждой дуги подписывается величина соответствующего угла в градусах и минутах.
| 35 40 45 50 5 5 60 65 70 |
| Рис. 6.1.1 |
Если расстояние определяется с помощью судового радиолокатора или дальномера, изостадий оцифровываются в кабельтовых.
Сетка лучей применяется при определении места траулера по пеленгам двух опорных пунктов, расположенных за рамками промыслово-навигационного (Рис. 6.1.2) планшета (карты).
Если ориентиры расположены в пределах рамок, то вместо сетки лучей обычно наносятся две картушки большого радиуса, центры которых совпадают с местами ориентиров.
Для построения картушки через место ориентира проводят меридиан и окружность радиусом 25—30 см. Затем прикладывают к меридиану ориентира срез линейки протрактора без фиксатора так, чтобы центр лимба находился на опорном пункте. Двигая с помощью отсчетного барабана одну из крайних линеек, разбивают на проведенной окружности картушку через 1 или 2е. Деления картушки оцифровывают величинами соответствующих пеленгов.
| Δ А |
Рис. 6.1.2
Таким же образом строят картушку и для другого ориентира.
Каждую картушку наносят на планшет своим цветом. Строить картушку полностью не нужно, достаточно лишь построить часть картушки только для сектора пеленгов, проходящих через промысловую площадку (рис. 6.1.2).
При радиусе картушки, равном 30 см, линейное расстояние между двумя соседними штрихами, обозначающими смежные градусы, равно 5 мм, что позволяет при прокладке пеленгов производить интерполирование на глаз с точностью до 0,5 мм, т. е. до 0,1°.
Предварительная подготовка планшета значительно облегчает работу судоводителя на промысле и сводит до минимума ошибки графических построений.
Расчеты показывают, что в этом случае ошибка графического нанесения места на планшет масштаба 1 : 50 000 на расстоянии до 20 миль от опорных пунктов не будет превышать 0,5 кбт.
С уменьшением расстояния до опорных пунктов пропорционально уменьшается и ошибка прокладки определений.
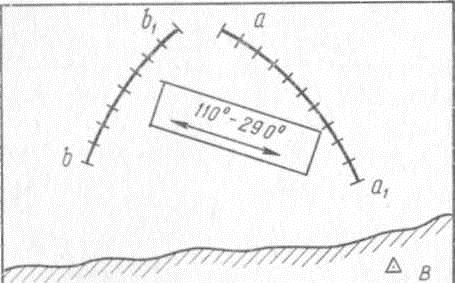
Комбинированная сетка изолиний (рис. 6.1.3) применяется при определении места траулера по пеленгам и расстояниям до одного или двух опорных пунктов. Нанесение на планшет сеток изолиний может затемнить промысловую обстановку и затруднить ведение счисления пути траулера. Поэтому при построении комбинированной сетки на планшет наносят только систему изостадий и для прокладки линий пеленгов опорного пункта используют одну из изостадий, на которой при помощи протрактора ( Рис. 6.1.3) строят картушку через 1—2°.
При наличии на берегу двух опорных пунктов такая комбинированная сетка изолиний позволяет на различных участках района промысла определять место траулера по двум пеленгам, двум расстояниям или по пеленгу и расстоянию до одного опорного пункта.
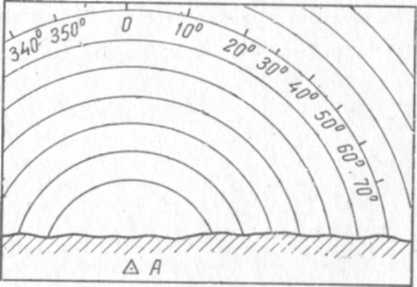
Рис. 6.1.3
а) Построение сеток изолиний, когда ориентиры располагаются в пределах рамок промыслово-навигационного планшета или карты
В рассматриваемом случае гониометрическую сетку на планшете (карте) наиболее просто и с достаточной для промыслового судовождения точностью можно построить при помощи протрактора методом градуированного перпендикуляра. Чтобы сетка не была слишком густой и не затемняла нанесенной на планшете промысловой и навигационной обстановки, интервалы углов, откладываемых протрактором, выбирают так, чтобы радиусы вмещающих окружностей отличались друг от друга на 10—15 мм.
Положение центров вмещающих окружностей на перпендикулярах можно определить без протрактора по расстояниям МОα (рис. 6.1.4) от середины хорды АВ, вычисленным по формуле:
МОα = (d / 2) ctgα (1)
где: d - длина хорды (базы) АВ.
При углах α, превышающих 90°, расстояние МОα рассчитывают по формуле:
МОα = (d / 2) ctg (α – 900) (2)
Радиусы вмещающих окружностей определяют на планшете по расстояниям от соответствующего центра Оα до любого из ориентиров А или В или рассчитывают по формуле:
R = (d / 2) cosec α (3)
Изолинии проводят только на промысловых площадках и в районах, непосредственно к ним прилегающих.
Систему изолиний каждой пары опорных пунктов наносят на планшет своим цветом. Около каждой изолинии (дуги) подписывают значение вмещаемого ею угла.
При построении стадиометрической сетки также обязательно соблюдать требование, чтобы изостадии находились на расстоянии 10—15 мм друг от друга. Если, например, масштаб планшета равен 1 : 50 000, то это соответствует на местности расстоянию 2,7—4,0 кбт. Следовательно, интервалы вертикального угла нужно выбирать так, чтобы разности расстояний не выходили за указанные пределы. Предварительный расчет размеров сетки выполняется прямо на планшете и заключается в измерении с помощью циркуля пределов изменения расстояний до ориентиров.
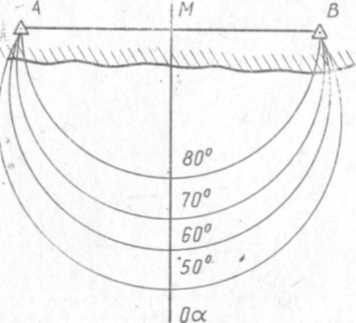
Рис. 6.1.4
б) Построение сеток изолиний, когда ориентиры располагаются за пределами рамок промыслово-навигационного планшета или карты
Для построения гониометрической сетки в случае, когда ориентиры находятся за рамками планшета (карты), можно использовать несколько способов. Однако большинство из них требует трудоемких вычислений и применяется главным образом при создании планшетов и карт специальными картографическими группами. В судовых же условиях гониометрическую сетку можно довольно просто построить графическим путем при помощи центральной точки и условных мест ориентиров (рис. 6.1.5), следующими приемами.
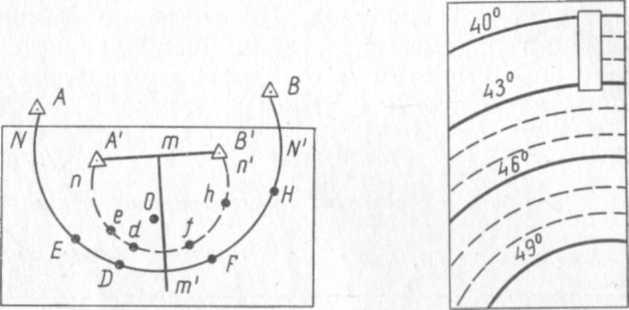 Соединив условные места опорных пунктов А' и В' прямой линией, восстанавливают из ее середины перпендикуляр mm′ и при помощи протрактора находят центры вмещающих окружностей. Затем для некоторого выбранного значения угла а проводят на планшете дугу пп' окружности, проходящей через А' и В' и вмещающей этот угол.
Соединив условные места опорных пунктов А' и В' прямой линией, восстанавливают из ее середины перпендикуляр mm′ и при помощи протрактора находят центры вмещающих окружностей. Затем для некоторого выбранного значения угла а проводят на планшете дугу пп' окружности, проходящей через А' и В' и вмещающей этот угол.
Рис. 6.1.5 Рис. 6.1.6
На дуге пп' выбирают ряд точек d, е, f, h, отстоящих друг от друга на расстоянии 3—4 см, соединяют их прямыми линиями с центром планшета О и на продолжении этих прямых откладывают расстояния, равные Оd, Ое, Оf, Оh и т. д. Через полученные точки D, Е, F, Н при помощи лекала или гибкой линейки проводят дугу NN' окружности, проходящей через ориентиры А и В и вмещающей угол α.
Подобным же образом строят дуги вмещающих окружностей и для других значений горизонтального угла а.
Закончив построение системы изолиний для одной пары ориентиров А и В и вычертив их цветной тушью, таким же способом строят систему изолиний для другой пары ориентиров В и С. При этом нет надобности вычислять каждую изолинию в отдельности. Достаточно вычислить только изолинии, отстоящие друг от друга на расстоянии 4—6 см, а остальные можно строить при помощи линейки или полоски бумаги с несколькими равноотстоящими делениями.
На рис. 6.1.6 изолинии построены только для углов через 30 (сплошные линии), и между ними при помощи полоски бумаги с четырьмя равноотстоящими делениями нанесены пунктиром отрезки изолиний (дуги вмещающих окружностей) для углов через 10.
Для построения сетки лучей орентира А на планшет (рис. 6..1.7) наносят центральную точку О и условное место ориентира А'.
Центр лимба протрактора с вынутым фиксатором устанавливают в точке А', а срез средней линейки ориентируют по меридиану, причем во избежание сдвига протрактора последний закрепляют тремя булавками. Затем при помощи отсчетного барабана устанавливают одну из крайних линеек на выбранные равноотстоящие значения пеленга и проводят на планшете линии условных пеленгов. На каждой линии условного пеленга выбирают две точки п и п', отстоящие друг от друга на расстоянии 10 - 15 см, и соединяют их прямыми линиями с центральной точкой О планшета. На продолжении этих линий откладывают расстояния, равные Оn и Оn' и получают точки N и N'. Проведя через эти точки прямую, получают на планшете линию фактического пеленга.
Построив на планшете сетку лучей из опорного пункта А, аналогичным приемом строят сетку лучей из опорного пункта В.
Стадиометрическую сетку строят следующим образом. От условного места опорного пункта А' раствором циркуля, равным половине расстояния, соответствующего данному значению вертикального угла, проводят дугу пп'. На этой дуге выбирают ряд точек d, е, f, h, отстоящих друг от друга на 3—4 см, соединяют их прямыми линиями с центром планшета О и на продолжении этих прямых откладывают расстояния, равные Оd, Ое, Оf, Оh и т. д.
| • |
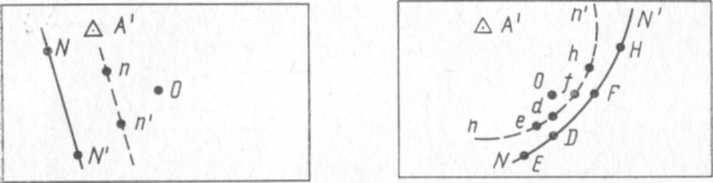 Через полученные точки D, Е, F, Н лекалом или гибкой линейкой проводят дугу окружности NN', которая соответствует выбранному значению вертикального угла (рис. 6.1.8). Точно так же строят изостадий для других значений вертикальных углов.
Через полученные точки D, Е, F, Н лекалом или гибкой линейкой проводят дугу окружности NN', которая соответствует выбранному значению вертикального угла (рис. 6.1.8). Точно так же строят изостадий для других значений вертикальных углов.
| • |
Рис. 6.1.7 Рис. 6.1.8
2. Определение места с использованием промыслового буя
Если по результатам пробного траления улов достигнет промысловой величины, траулер обычно ставит буй, который служит промысловым и навигационным ориентиром при дальнейшей работе.
Прокладку курсов пробных тралений при дальнейшем обследовании района также целесообразно вести на кальке, наложенной на промыслово-навигационную карту или планшет и ориентированной относительно меридиана.
На рис. 6.2 точка А0 — счислимое место буя на карте. Располагая курсы пробных тралений на различных расстояниях от буя, траулер при обследовании района определяет свое место относительно буя по визуальному пеленгу и радиолокационному расстоянию до него при спусках и подъемах трала (точки А1, А3, А5, А8), а также в моменты пересечения по записям эхолота характерных изобат, нанесенных на карте или планшете (точки А2, А4, А6, А7).
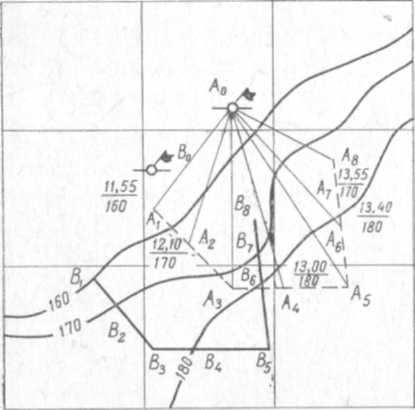
Рис. 6.2
Для уточнения границ обследованного пробными тралениями участка на кальке через место промыслового буя проводят меридиан и параллель и, перемещая кальку по планшету, добиваются такого положения, чтобы определенные по пеленгу и расстоянию до буя точки Л2, Л4, Л6, Л7 совпали с соответствующими изобатами на карте или планшете. Затем уколами циркуля переносят на карту (планшет) маршрут траулера (ломаная линия В1, В2, . . ., В8) и одновременно уточняют место постановки промыслового буя (точка В0).
Этот прием позволяет исключить из наблюдений влияние недостаточно точно известных внешних факторов (течения и ветра).
Дата добавления: 2017-06-02; просмотров: 1827;