Аппроксимация сложных объектов управления совокупностью нескольких ТДЗ
Рассмотрим, как на практике применяются ТДЗ при синтезе САУ. Пусть задан некоторый реальный объект управления (ОУ).
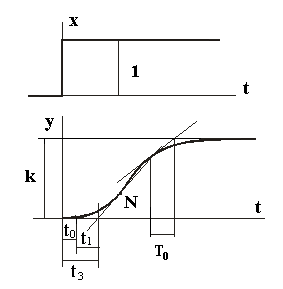
Рис. 8.1. Кривая разгона
Для того, чтобы решить задачу анализа и синтеза САУ, необходимо установить передаточную функцию и постоянные времени ОУ. Для этого экспериментальным путем строится кривая разгона y(t), как реакция системы на единичный скачок (рис. 8.1).По кривой разгона следует, что выходной сигнал в начале запаздывает на некоторое время транспортного запаздывания t0. Затем y(t) изменяется как выходной сигнал апериодического звена второго порядка, передаточная функция которого имеет вид
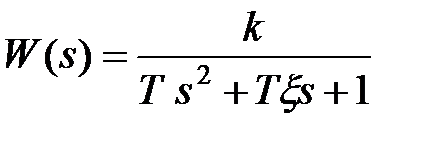 ,
,
где k – коэффициент усиления; T – постоянная времени; x – коэффициент демпфирования.
Аналитически определить указанные коэффициенты довольно сложно. По этой причине на практике применяется прием аппроксимации кривой y(t) совокупностью нескольких кривых типовых звеньев, для которых коэффициенты легко определяются. Для этого в точке N перегиба звена проводится касательная и определяется емкостное запаздывание t1 по точке пересечения касательной с осью времени. Оставшаяся часть кривой может рассматриваться как график апериодического звена первого порядка. Таким образом, обьект управления аппроксимируется последовательным соединением двух звеньев: запаздывающего с временем запаздывания t3 = t0 = t1 и апериодического 1-го порядка (рис. 8.2).
Рис. 8.2. Аппроксимация ОУ
Передаточная функция ОУ, составленного из последовательно соединенных звеньев имеет вид
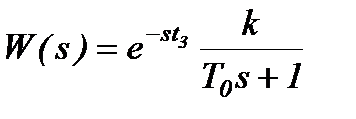 .
.
Коэффициенты k ,T0 легко определяются изложенным ранее способом. Обьект (рис.8.2) называатся статическим обьектом с запаздыванием.
Дата добавления: 2017-05-18; просмотров: 1438;