Устройство сравнения
Устройства сравнения (УС) выполняют функцию сравнения сигналов. Так, например в САУ с обратной связью к одному из входов УС поступает сигнал от датчика, а к другому от ЗУ (задатчика) заданное значение сигнала. В зависимости от разницы формируются сигналы для управления. В электрических схемах в качестве УС используются переменные резисторы, потенциометры, электронные устройства.
Пусть заданное значение управляемой величины g . Этот сигнал контролируется датчиком, который в данный момент выдает значение у. На УС получается сигнал рассогласования
 . (9.1)
. (9.1)
Предположим, что в системе управления к выходу УС присоединен исполнительный механизм. При l = 0 система находится в равновесии, а при  включается механизм.
включается механизм.
В качестве УС часто используется мостовая схема, приведенная на рис. 9.3.
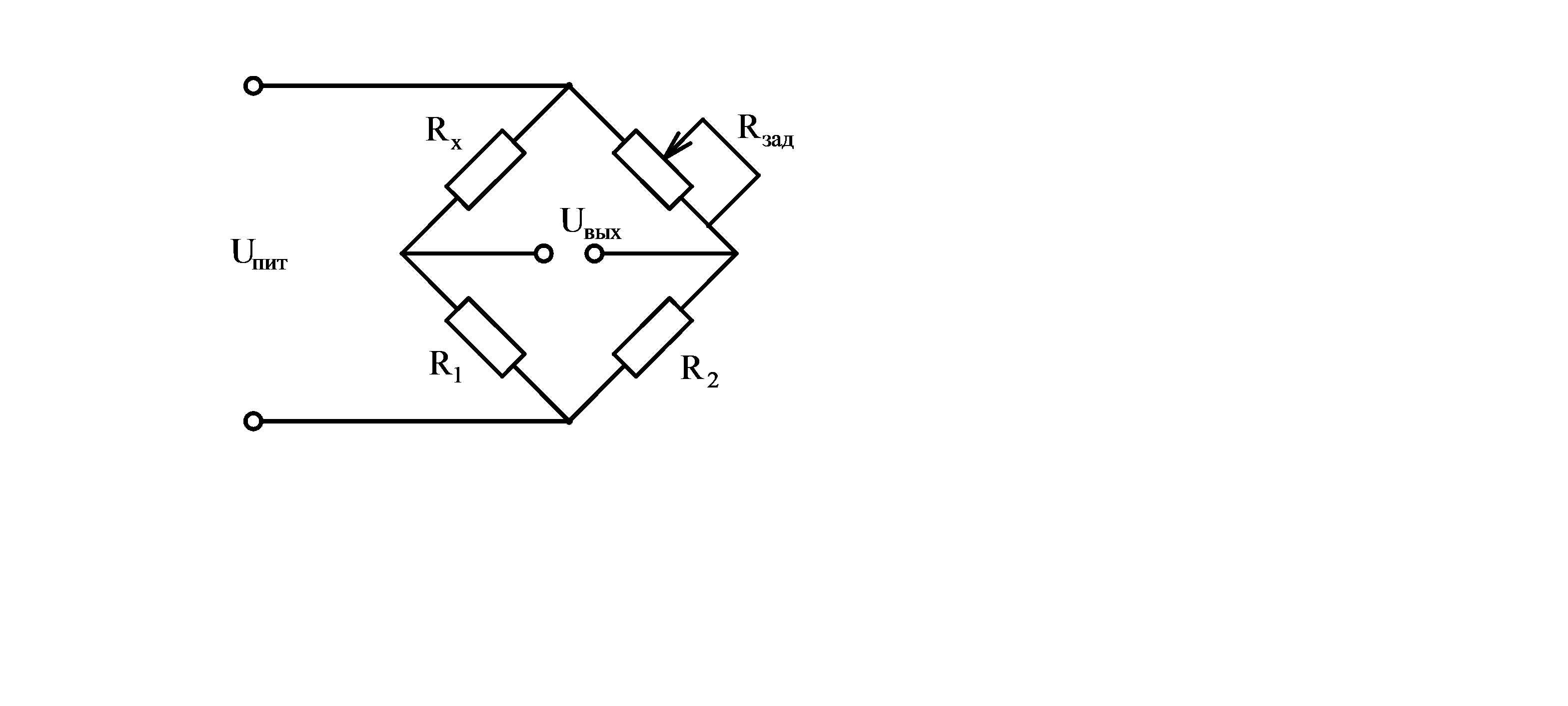
Рис. 9.3. Мостовая схема УС
Рассогласование с применением мостовой схемы определяется выражением
 . (9.2)
. (9.2)
УС может быть построена на базе операционного усилителя.
Усилители
Усилитель (У) предназначен для усиления входного сигнала. В некоторых случаях с помощью У получают заданную зависимость между входным и выходным сигналом. Следует отметить, что в усилителях сигналы на входе и выходе имеют одну и ту же физическую природу. Усиление или преобразование энергии в У осуществляется за счет энергии источника питания усилителя.
Основными характеристиками У являются:
коэффициент усиления; линейность статической характристики; быстродействие; уровень собственных шумов; максимальная выходная мощность.
В САУ применяются следующие типы усилителей: полупровдниковые, магнитные, электромашинные, гидравлические, пневматические и др. В измерительной технике широко применяются полупроводниковые У, которые имеют высокий коэффициент усиления, низкий уровень шумов, большое быстродействие. Вместе с тем эти У имеют низкую выходную мощность.
Полупроводниковые усилители достаточно подробно рассматриваются в курсе Электроники. Здесь в качестве примера рассмотрим усилитель на биполярном транзисторе, схема которого приведена на рис. 9.4.
Здесь сопротивления R1, R2 обеспечивают равновесие в каскаде. При этом в транзисторе протекают токи покоя базы Iб.п. , коллектора Iк.п., эммитера Iэ.п., также имеются соответствующие напряжения Uбп , Uкп ,Uэп. Емкости С1, С2 выполняют разделительные функции. Емкость С1 препятствуют протеканию тока с делителя R1 , R2. Емкость С2 препятствует прохождению напряжения на сопротивление нагрузки Rн. Сопротивление Rэ определяет ток покоя через транзистор при заданном напряжении Uбп. Так, в случае роста температуры коллектора ток Iк.п. и Iэ.п возрастают, при этом возрастает и падение напряжения на эмиттере Uэп = Iэп Rэп. Ввиду того, что напряжение на базе фиксировано, то происходит закрывание транзистора, что приводит к автоматической балансировке режима покоя в работы транзистора.
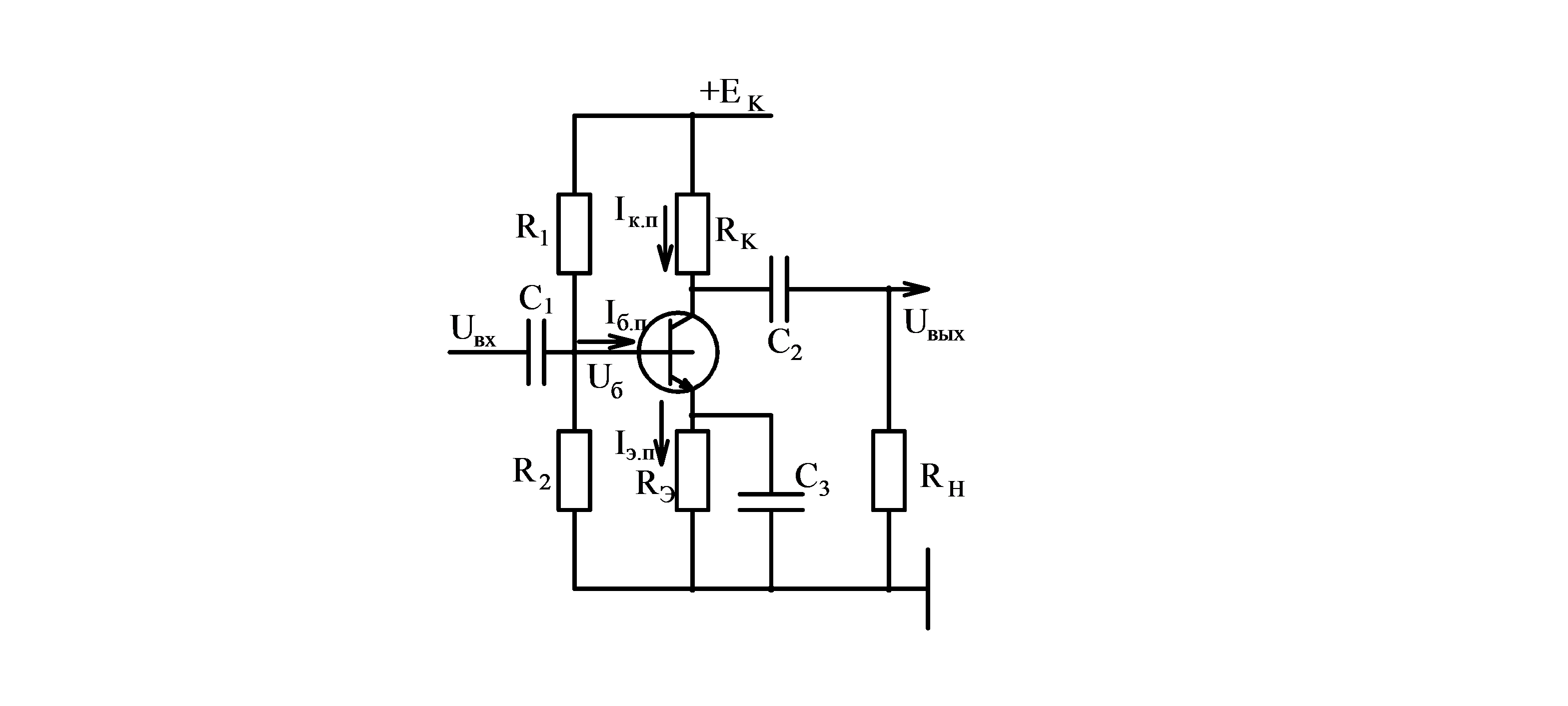
Рис. 9.4. Схема усилителя на биполярном транзисторе
Переменный ток эмиттера создает переменное напряжение Uэ = Iэ Rэ, которое уменьшает усиливаемое напряжение. Коэффициент усиления каскада (из одного У) равен
К = Rк / Rэ.
Для определения параметров выходного сигнала в динамическом режиме сопротивление нагрузки Rн подключается параллельно сопротивлению Rк. Тогда общее сопротивление в цепи коллектора равно
 . (9.3)
. (9.3)

Рис. 9.5 Схема магнитного усилителя
Рассмотрим пример магнитного усилителя. Магнитный усилитель (МУ) представляет многообмоточный дроссель с железным сердечником. Принцип действия МУ связан с тем, что при подмагничивании сердечника магнитным полем постоянного тока происходит изменение индуктивности обмоток переменного тока. На рис. 7.6 представлена схема однотактного магнитного усилителя. Этот МУ имеет одну двухсекционную обмотку переменного тока  . Последовательно к этой обмотке подключена нагрузка усилителя Rн. На среднем стержне имеются 3 обмотки: управляющая (wупр), обратной связи (wос) и нулевая (w0). По управляющей цепи подается входной сигнал в виде постоянного тока iупр . Обмотка обратной связи питается через выпрямитель выходным напряжением МУ. При этом положительная обратная связь увеличивает крутизну статической характеристики и инерцию усилителя. И, наоборот уменьшает эти параметры при отрицательной обратной связи. Роль обратной связи важна в связи с тем, что быстродействие МУ сравнительно низкое. Нулевая обмотка питается от независимого источника питания и служит для сдвига рабочей точки усилителя на линейный участок.
. Последовательно к этой обмотке подключена нагрузка усилителя Rн. На среднем стержне имеются 3 обмотки: управляющая (wупр), обратной связи (wос) и нулевая (w0). По управляющей цепи подается входной сигнал в виде постоянного тока iупр . Обмотка обратной связи питается через выпрямитель выходным напряжением МУ. При этом положительная обратная связь увеличивает крутизну статической характеристики и инерцию усилителя. И, наоборот уменьшает эти параметры при отрицательной обратной связи. Роль обратной связи важна в связи с тем, что быстродействие МУ сравнительно низкое. Нулевая обмотка питается от независимого источника питания и служит для сдвига рабочей точки усилителя на линейный участок.
При подаче тока на эту обмотку рабочая точка сдвигается вправо на середину линейной характеристики. В этом случае при МУ приобретает свойство чувствительности к полярности управляющего тока. При отсутствии тока в нулевой обмотке МУ нечувствителен к изменению полярности, а характеристики усилителя симметричны относительно оси ординат.
В автоматических системах управления с гидравлическими элементами применяются гидроусилители. Принцип действия простого гидроусилителя показан на рис. 7.7. Благодаря свойству усиления малому входному усилию соответствует высокое выходное усилие на штоке. В качестве примера рассмотрим расчетную схему гидросистемы, состоящей из гидронасоса и гидродвигателя поступательного движения, гидроцилиндры которых соединены друг с другом короткой магистралью (рис.7.7).
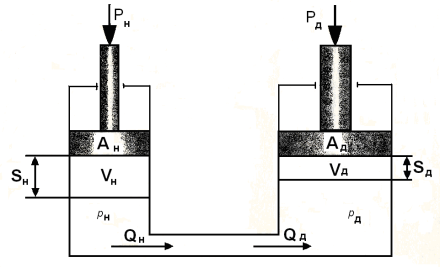
Рис. 9.6. Схема гидроусилителя
Если на шток гидронасоса (ГН) с площадью поршня АН действует сила РН, то в жидкости возникает давление рН = РН/ АН , которое действует на поршень гидродвигателя (ГД) площадью АД и вызывает на штоке силу, которая уравновешивает силу РД =  в том случае, когда система находится в равновесии и без учета потерь на трение и потери давления в магистрали
в том случае, когда система находится в равновесии и без учета потерь на трение и потери давления в магистрали  . Отсюда следует, что
. Отсюда следует, что
 .
.
Из этого выражения следует мультипликационный эффект ГП, характеризуемый коэффициентом мультипликации. Коэффициент мультипликации равен отношению силы на выходном звене к силе на входном звене
 .
.
Дата добавления: 2017-05-18; просмотров: 3488;