Основные принципы регулирования и управления
Основные понятия автоматики
Основным объектом автоматики является объект управления (ОУ). Под ОУ понимается техническое устройство, установка или процесс, подлежащие специально организованному воздействию для достижения поставленных целей. Эти преднамеренные воздействия называются управлением. Физические величины ОУ, которые целенаправленно изменяются или сохраняются неизменными в процессе управления, называются управляемыми величинами. Под воздействиями понимают факторы, изменяющие состояние объекта управления. Различают возмущающие и управляющие воздействия. Возмущающие воздействия (f) носят в основном случайный характер. Например, влияние температуры окружающей среды, давления, скорости воздуха, колебания напряжения в электросети на ОУ. Управляющие воздействия (u) на ОУ в соответствии с законом управления оказывают автоматические устройства управления (в дальнейшем называемые устройством управления – УУ).
Сигналы обозначают совокупность энергии, материала или информации, поступающих в объект управления или выходящие из него, возмущающие и управляющие воздействия, а также регулируемые параметры. По направлению различают входные (u) и выходные(y) сигналы объекта управления. Так, возмущающие и управляющие воздействия будут входными сигналами для объекта управления; регулируемый же параметр всегда принимают за выходной сигнал, даже если он физически за пределы объекта не выходит (например, уровень жидкости в емкости, напряжение на обмотках электродвигателя). В общем случае сигналов может быть несколько, тогда они обозначаются векторами, а система назовется многопараметрической.
На схеме (рис. 1.1) показано воздействие различных сигналов на ОУ.
Рис. 1.1 Объект управления
В состав автоматически управляемых объектов входит конструктивные и схемные элементы, каждый из которых имеет определенные свойства по преобразованию и передаче последующему элементу энергии и информации. Эти свойства элементов как преобразователей характеризуются оператором преобразования (ОП). С другой стороны каждый элемент рассматривается как звено системы, в которой осуществляется преобразование «вход-выход». Соединение элементов в определенную конфигурацию, обеспечивающую заданные характеристики образует систему управления (СУ), объединенную причинно-следственной связью. Функциональные схемы отражают функции (сравнение, преобразование, усиление и т.д.) выполняемые отдельными элементами системы. В функциональных схемах линии со стрелками указывают направление причинно-следственной связи функциональных составных элементов. В системе автоматического управления (САУ), управление осуществляется специальными техническими средствами без непосредственного участия человека.
Если управляющее воздействие осуществляется оператором, то управление будет полуавтоматическим, а система в этом случае называется автоматизированной.
На рис. 1.2. показана укрупненная функциональная схема САУ, содержащая характерные функциональные блоки: задающее устройство – ЗУ; сравнивающее устройство – СУ; преобразующее устройство – ПУ; корректирующее устройство – КУ ; исполнительное устройство – ИУ; измерительную систему – ИС. Совокупность указанных устройств называются управляющим устройством –УУ.
Рис. 1.2. Функциональная схема САУ
Функциональные блоки САУ реализуются с помощью технических средств автоматики или приборов автоматики.
Анализ и синтез САУ является основной задачей науки, называемой Теорией автоматического управления (ТАУ).
Анализ САУ включает в себя выявление закономерностей изменения поведения системы в зависимости от характеристики элементов и причинно-следственной связи между ними, а также количественная оценка свойств поведения. Составной частью ТАУ является Теория автоматического регулирования (ТАР), в которой рассматриваются принципы автоматического регулирования технических процессов, методы исследования, расчета и проектирования систем автоматического регулирования (САР).
В большинстве случаев по результатам анализа выполняется синтез САУ. При синтезе САУ осуществляется выбор элементов и причинно-следственных связей между ними так, чтобы получить требуемое поведение.
Основные принципы регулирования и управления
Задача управления – изменять протекающие в объекте управления процессы или состояние ОУ посредством соответствующих мер, для достижения поставленной цели. Несмотря на разнообразие ОУ, построение САУ основывается на ряде общих принципов.
В зависимости от характера и полноты информации реализуются следующие принципы управления:
· принцип разомкнутого управления;
· принцип компенсации – управление по возмущению;
· принцип обратной связи – управление по отклонению;
· комбинированное управление;
· адаптивное управление.
Рис. 1.3. Разомкнутая система управления
Если известна информация о цели управления, заданная в виде y = const, известны характеристики объекта и отсутствуют возмущения, то легко определяется управляющее воздействие u. В данном случае цель управления может быть достигнута применением принципа разомкнутого управления, схема которого показана на рис. 1.3. Здесь УУ – устройство управления представляющее совокупность технических устройств (рис. 1.2), для реализации цели управления.
В некоторых случаях возмущения f , действующие на ОУ можно измерить или определить. Тогда можно компенсировать управляющее воздействие uy с учетом возмущения введением компенсатора К. В этом случае используется принцип компенсации.
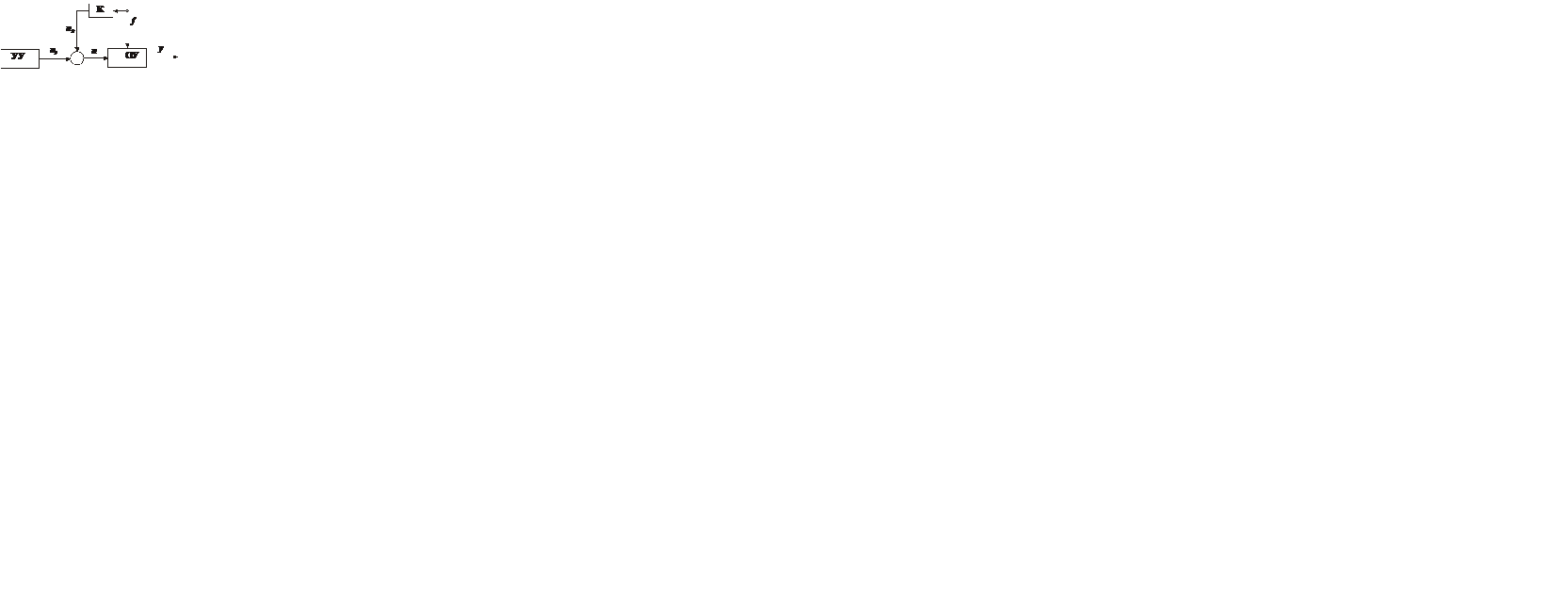
Рис. 1.4. – Схема СУ с компенсацией возмущения
В разомкнутой САУ появляется второй канал, по которому передается компенсирующее воздействие uk, вычисленное на основании характеристики объекта и возмущения. Система, построенная на принципе компенсации возмущения показана на рис. 1.4.
Однако в большинстве случаев полная информация о возмущениях является неизвестной. В этих случаях для учета возмущений может быть использована информация об отклонениях управляемой переменной у, получаемая измерительной системой (датчиком). Система управления в этом случае строится по принципу обратной связи (рис. 1.5).

Рис. 1.5. Система управления с обратной связью.
Здесь в зависимости от отклонения действительного значения выходной переменной у в измерительной системе (ИС) формируется дополнительное управляющее воздействие uu. На рис. 1.5. показана СУ с отрицательной обратной связью (наиболее распространенной). При этом отклонение uc, определяемое устройством сравнения, определяется как разность входных сигналов, т. е. uc= uу – uи.
Принцип управления по отклонению является наиболее распространенным. Он позволяет осуществлять требуемый закон изменения выходной величины с допустимо малым отклонением и ослабить влияния возмущающих сигналов f без непосредственного их изменения.
Дата добавления: 2017-05-18; просмотров: 2603;