Основные этапы проектирования систем управления
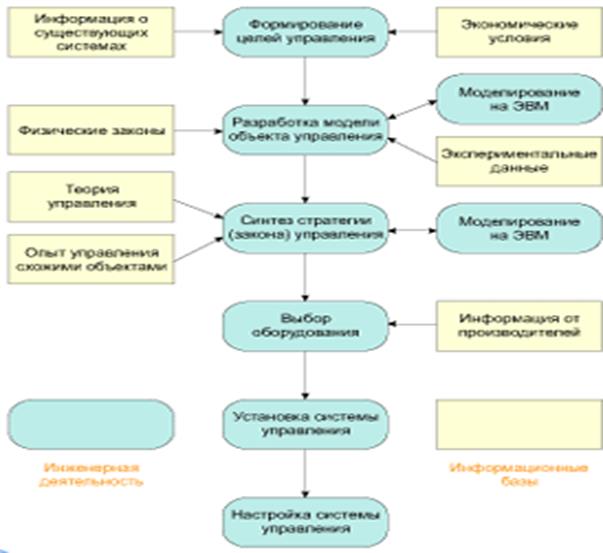
Рис. 1.13. Этапы проектирования систем управления
Пример автоматической системы
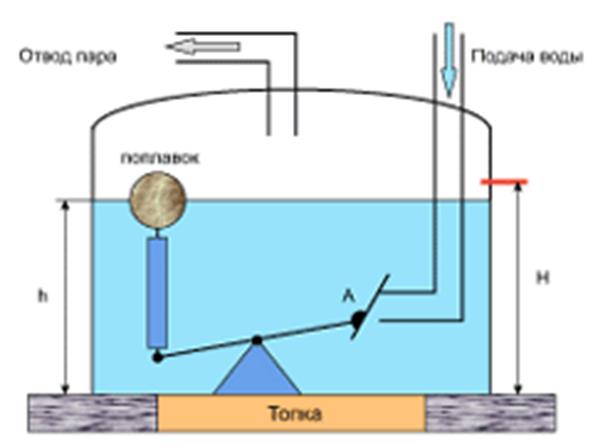
Рис. 1.14. Автоматический регулятор уровня воды в паровом котле
Один из первых в истории техники автоматических регуляторов был изобретён И.И. Ползуновым в 1765 году.
Данный регулятор является системой прямого управления с отрицательной обратной связью. Он действует таким образом, что нежелательное отклонение уровня воды всегда ликвидируется независимо от причин, вызвавших это отклонение.
h - регулируемая величина (уровень воды в котле)
Н – задающее воздействие (желаемый уровень воды в котле)
Клапан А – регулирующий орган
Поплавок – измерительное устройство
Возмущающие воздействия – неравномерность отвода пара, изменение интенсивности топки, температура питающей воды.
Основные характеристики типовых звеньев и систем
Автоматического управления
Типовые звенья САР
В разделе I.2. уже отмечалось, что звено и все САР в целом после линеаризации в общем случае описывается линейным дифференциальным уравнением достаточно высокого порядка. Из методических соображений представляется целесообразным такие сложные звенья и системы в целом представлять совокупностью так называемых типовых звеньев. Под типовым звеном будем понимать устойчивое (этот термин будет разъяснен позднее) звено, которое описывается линейным дифференциальным уравнением с постоянными коэффициентами не выше второго порядка
Структурная схема звена или системы в целом представлена на рис.2.1, причем, как обычно, x(t) – входной сигнал звена (системы), z(t) – выходной сигнал,  – передаточная функция.
– передаточная функция.
Рис. 2.1. Структурная схема звена.
Обычно к типовым звеньям относят:
- усилительное  ;
;
- апериодическое  ;
;
- интегрирующее  ;
;
- дифференцирующее  ;
;
- колебательное  ;
;
- форсирующее  ;
;
- запаздывающее  -pt.
-pt.
Дата добавления: 2017-01-13; просмотров: 879;