Основные принципы (виды) управления
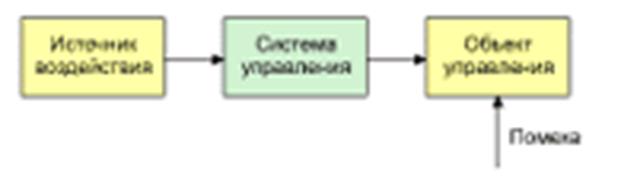
Рис. 1.3. Принцип разомкнутого управления (программное, плановое управления)
Условия применимости:
- наличие достаточно точной модели объекта управления
- неизменчивость свойств объекта управления в процессе работы
- незначительность или полное отсутствие помех.
Информация о состоянии среды и объекта не используется
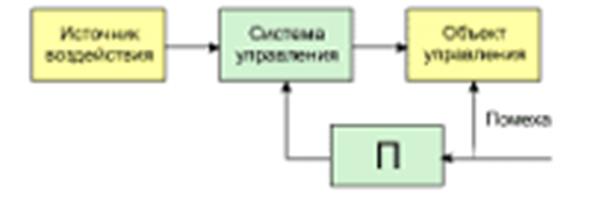
Рис.4. Принцип компенсации (управление по возмущению)
Преобразователь П вырабатывает сигнал, используемый для компенсации влиянии помехи на объект управления.
Главный недостаток:
- необходимость измерения или априорного задания возмущения (например, его математической модели).
Информация о состоянии объекта не используется вообще, информация о состоянии среды используется частично.
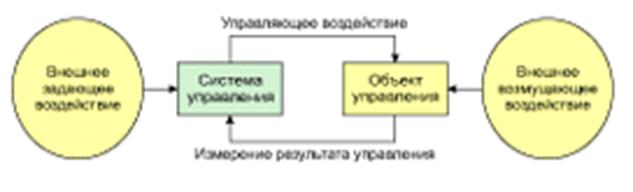
Рис. 1.5. Принцип управления с обратной связью.
Принцип управления с обратной связью позволяет обеспечить высокое качество управления в условиях неопределённости относительно свойств объекта управления и помех.
Используется информация о состоянии объекта управления.
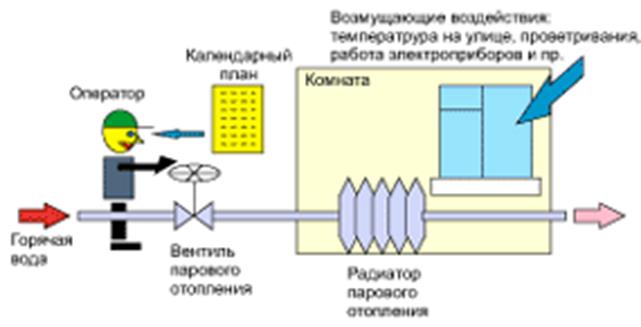
Рис. 1.6. Иллюстрация принципа разомкнутого управления
Управление температурой в комнате Вариант 1 осуществляется по заранее созданной программе. Возмущающие воздействия здесь не компенсируются, поэтому температура воздуха в комнате может существенно отличаться от заданной, так как оператор при управлении отоплением руководствуется только календарным планом.

Рис. 1.7. Иллюстрация принципа компенсации
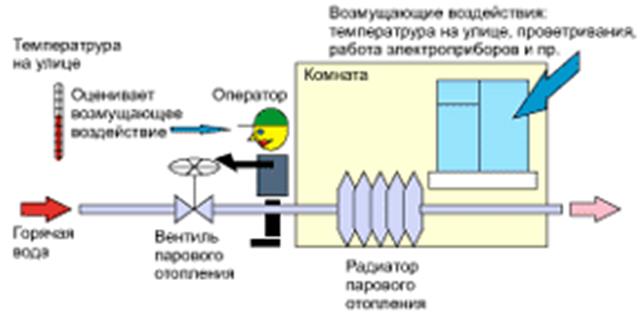
Рис. 1.8. Управление температурой в комнате Вариант 2
Вариант 2 осуществляется в соответствии с изменениями температуры на улице. Таким образом, частично уравновешивается одно возмущение, при этом температура воздуха в комнате может существенно отличаться от заданной, вследствие наличия других возмущений.
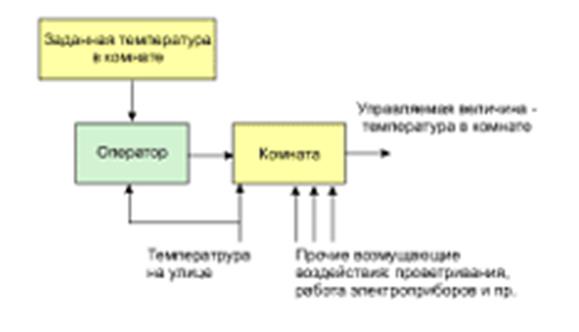
Рис.1.9. Иллюстрация принципа замкнутого управления
(управление с обратной связью)
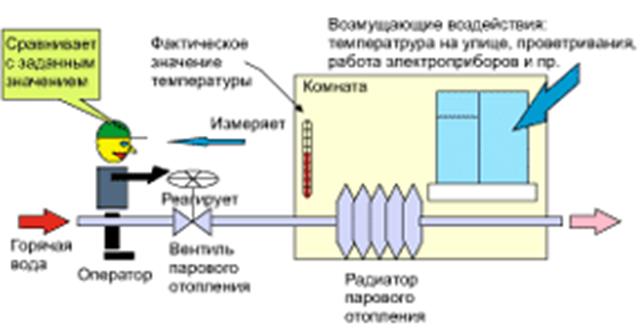
Рис. 1.10. Управление температурой в комнате Вариант 3
Осуществляется в соответствии с фактическим значением температуры в комнате. Возмущающие воздействия влияют на температуру воздуха в комнате, но их влияние устраняется (уравновешивается) посредством регулирования.

Рис. 1.11.Система управления с обратной связью
Регулируемая величина это управляемая величина, подлежащая регулированию.
Задающее воздействие определяет заданное значение, к которому должна стремится регулируемая величина.
Возмущающее воздействие влияет на процесс (объект управления) нежелательным и, в большинстве случаев, непредсказуемым образом.
Регулирующее воздействие оказывается регулирующим органом и компенсирует возмущающее воздействие.
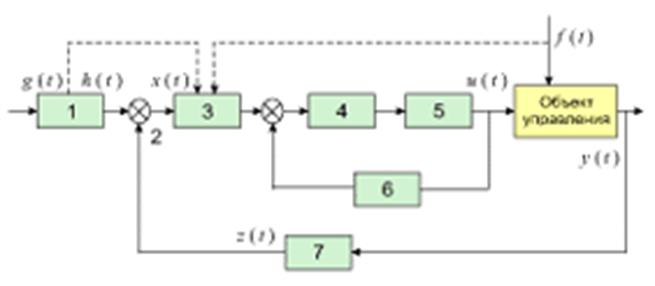
Рис. 1.12. Система автоматического управления с отрицательной обратной связью, использующая принцип управления по отклонению
На рис. 1.12. показаны:
1 устройство предварительной y(t) – регулируемая величина
обработки информации
2 датчик рассоглосования g(t) – задающее воздействие
3 измерительное устройство u(t) – регулирующее
воздействие
4-6 усилительно-преобразовательные x(t) – сигнал ошибки
и исполнительные устройства
7 устройство обработки f(t) – возмущающее
сигнала обратной связи воздействие
Дата добавления: 2017-01-13; просмотров: 907;