Требуется определить экспериментально-расчетные значения Лэ р и для
судна в полном грузу:dcр—9,8 м; Д«25000 т; л3.х=90 об/мин (характеристики корпуса и гребного винта даны в п. 5.2).
Решение.
Обработка натурных экспериментов.
1. Первый эксперимент:
1) V/yJ1 = =0,438; V^1 / '1 = 16,0-400 = 6400 уэс, а=0;
А 22 850
2) из УД---------- (A/fc)s«2,3, откуда кэ — ——------------ = -——=== 9935 кг/м;
Л/й)э 2,3
3) Й =Д2/3 ^4,854 -I- 0,492-у) = 22 850*/3 ^4,854 + 0,492-2^-j = 5008 м*;
4) *---5 880 + 0,654U —■ =5880 + 0,654 =11 337 кг/м;
*„ 9 935
5>v*=-f=
II Второй эксперимент:
I) -9.4.129» 1213; У/У"1 =-«, <Д/Лг)а— 1.3;
2) из УД— а. я» 7,5, откуда /*,*=--«» к.л (0.514^м )* - ~7.5-9935 (0,514.9.4)» = 1 742 454 Н;
3) к,, —У0г( 0,225sin* — 0,098 sin ^
\ ^11 ‘ /
--- уО,бб9-4 (0.225 sin* 1,0164-0,098 sin 1,016)^0,341;
4) Pm*” *Р Р (-jjj-y D* = 0,341 • 1020 6,0« = 1 082 986 H:
5 |954.915-0 98
Ъ) Cyy -0,508 I-0,106-j— «=.-0,5084 0,106—^'^оГ/4 ’
6) /"max * Cyy Ршн = 1,362-1 082 986 ^ 1 475 027 H;
/»„ 1742453
7)V,’^'^7 1475027 " ' '
Определение экспериментально-расчетных значений коэффициента сопротивления и силы упора для судна в полном грузу.
1) И-= 25000214,854 0,492 ) =5240 м*;
/ 25,4
2) к 5880 ; 0,<»54*5 240 |/ -11 397 кг/м;
3) —Yk Л —0,876* 11 397 -9 984 кг/м;
Х)
4) (Д/^.р-^-2.5;
5). /ши -0,341 • 1020(У 6,О4 - 1 014 243Н;
25,4*9,8*0,98
<i) СУ¥ =0,508 ; 0,100 -—!— - 1,423;
' у> 1 я-6,02/4
7) Ртак -» 1,423-1 014 243-- 1 443 268 Н;
#> ^max^Yp^ir»ax-=iJ8l*l 443 268-1 704 500 Н.
Полученные экспериментально-расчетные значения коэффициента юпротивления и силы упора винта позволяют определить время и путь торможения при заданной осадке и частоте вращения для любой начальной скорости судна по такой же схеме, какая применялась для Расчетного метода в предыдущем примере (см. п. 5.4).
Точность экспериментально-расчетного метода. Точность определения тормозных путей экспериментально-расчетным методом в среднем на 1—2% выше, чем расчетным, благодаря привязке к экспериментальным данным с помощью переходных коэффициентов. Стандартная относительная погрешность экспериментально-расчетного определения полных тормозных путей по статистическим оценкам составляет около 5—6 %. Таким образом, выигрыш в точности не очень велик, тем не менее применение экспериментально-расчетного метода существенно повышает надежность результатов, особенно для судов, обладающих необычными тормозными свойствами. В этих случаях выигрыш в точности гораздо выше.
Особо следует подчеркнуть, что экспериментально-расчетный ме- к)д применим для всех судов, включая многовинтовые, в то время как расчетный метод можно использовать только для определения ИТХ одновинтовых судов.
Контрольныевопросы. 1. Каковы требования ИМО к форме и содержанию судовой информации о маневренных характеристиках? 2. Каковы достоинства и недостатки различных способов определения маневренных элементов из натурных наблюдений? :t. Каковы принципы и порядок определения элементов поворотливости расчетно-экспериментальным методом?4. Каковы обоснования определения коэффициента сопротивления расчетно-экспериментальным методом? 5. Каковы обоснования определения максимальной силы упора винта при торможении расчетно-экспериментальным метолом? в. Что представляют собой переходные коэффициенты и какова их роль в расчетно-экспериментальных методах определения маневренных характеристик судов?
Глава 6. СРЕДСТВА И СПОСОБЫ УЛУЧШЕНИЯ МАНЕВРЕННЫХ ХАРАКТЕРИСТИК СУДНА
6.1. Средства активного управлении (САУ)
САУ создаются, как правило, на основе использования: крыльча- i ых движителей (КД), поворотных винтовых колонок (ПВК) и раздельных поворотных насадок (РПН).
Рассмотрим кратко принцип действия перечисленных устройств.
Крыльчатый движитель представляет несколько (4—8) одинаковых поворотных вертикальных лопастей, расположенных на равных расстояниях по окружности вращающегося диска, установленного заподлицо
< наружной обшивкой днищевой части судна. При вращении лопастей имеете с диском каждая лопасть посредством специального привода и !яг совершает еще и колебательные движения вокруг собственной оси,
|
| в) ДП |
| д) дп |
| S) дп |
| г) дп |
| д) ап |
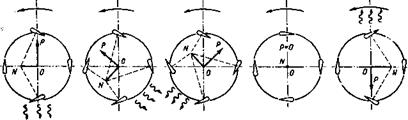
| Рис. 6.1. Направление силы упора крыльчатого движителя Р в зависимости от положения центра управления N относительно центра диска О:а— вперед;6— вперед и влево; в — вперед и вправо;г— нулевой^ упор;д— назад |
благодаря чему углы атаки изменяются в зависимости от угла поворота диска.
Принцип действия КД поясняется на рис. 6.1. В процессе вращения диска каждая лопасть разворачивается перпендикулярно к линии, соединяющей середину хорды лопасти с точкой N. Эта точка называет- ся центром управления. Угол атаки каждой лопасти за время оборота диска непрерывно меняется, достигая максимального значения, когда лопасть находится на радиусе, перпендикулярном ON. Поэтому суммарная сила упора лопастей Р направлена по этому радиусу.
Абсолютное значение углов атаки, а значит и сила упора увеличиваются с увеличением расстояния центра управления от центра диска О, т. е. с увеличением эксцентриситета.
Система управления лопастями КД позволяет устанавливать центр управления N в любое фиксированное относительно судовых осей положение, т. е. без реверсирования создавать упор в любом направлении и изменять его величину.
КД применяется как в качестве ГДРУ (буксиры, паромы, плавкраны и т. п.), так и в качестве вспомогательного средства управления — ПУ на морских судах. В последнем случае КД располагается обычно в поперечном канале, расположенном ниже ватерлинии, в корпусе судна.
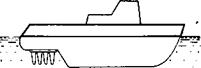
На рис. 6.2 показан пример использования КД в качестве ГДРУ на портовом буксире.
Поворотные винтовые колонки представляют собой гребной винт (иногда в комплексе с насадкой), направление тяги которого может изменяться на 360° за счет поворота относительно вертикальной оси.
ПВК могут быть главными движителями или вспомогательными. В первом случае они относятся к ГДРУ, во втором — к ВДРУ.
 Как ГДРУ, поворотные винтовые колонки применяются на судах, к управляемости которых предъявляются особенно высокие требования, но скорость которых невелика (плавкраны, портовые буксиры, пожарные суда и т. д.).
Как ГДРУ, поворотные винтовые колонки применяются на судах, к управляемости которых предъявляются особенно высокие требования, но скорость которых невелика (плавкраны, портовые буксиры, пожарные суда и т. д.).
Рис. 6.2. Пример использования КД в качестве ГДРУ на портовом буксире
 |

6.2. Принципы управления судном с использованием САУ
Общим признаком, характеризующим рассмотренные в п. 6.1 САУ, является способность создавать поперечную силу даже при полном отсутствии скорости судна по курсу.
Точка приложения поперечной силы по длине судна зависит от места установки данного САУ. Исключением является РПН, позволяющие в зависимости от угла перекладки насадок приложить поперечную сипу к диаметральной плоскости в любой точке корпуса судна, а также за его пределами.
Если же на судне установлены, например, две поворотные винтовые колонки или два подруливающих устройства —- носовое и кормовое, то совместное использование таких САУ тоже позволяет произвольно выбирать точку приложения поперечной силы, как и при использовании РПН.
Характер поведения судна под воздействием САУ определяется расстоянием точки приложения поперечной силы Р„ от ЦТ судна, т. е. плечом .v„. Под влиянием момента поперечной силы Мр=Ру судно полу- чает вращательное движение. При этом тангенциальная скорость каж-| дой точки по длине судна определяется расстоянием этой точки от ПП и угловой скоростью судна.
Распределение местных скоростей по длине судна при вращении вокруг ПП, расположенного на некотором расстоянии от ЦТ, показано на рис. 6.4. В одном случае (рис. 6.4,‘а) ПП расположен за корпусом судна на продолжении его ДП, а в другом (рис. 6.4, б) —в пределах корпуса судна.
Напомним, что ПП называется точка на ДГ1, в которой угол дрейфа равен нулю. Когда вращение судна происходит относительно неподвижной точки ПП, лежащего на ДП, уравнения установившегося движения судна (по оси Y и вокруг оси Z) могут быть записаны в виде: !
Ry -Ри ; |
Мщ'иР,Х,~РШ1ЛрЧ (Ь "
где Ry — поперечная гидродинамическая сила на корпусе (равнодействующая сил);
Ру — поперечная сила САУ (или буксира);
Мп — момент поперечной гидродинамической силы относительно ЦТ (оси Z);
хр —- плечо поперечной силы САУ (или буксира) относительно ЦТ;
—длина судна;
хР — относительное плечо силы Pw
Если принять для простоты, что корпус судна симметричен относительно миделя (ЦТ), а осадка на всем протяжении корпуса постоянна (судно — на ровном киле), то элементарную гидродинамическую силу dRVt действующую на элемент корпуса по длине dd\\ и ее момент dM можно записать в виде системы:
d v* dx;
dMR- с ~-dv*xdx,
Дата добавления: 2016-07-09; просмотров: 1056;